



















































 Plomb 10.16mm(0.4\") avec Capteur")
 Plomb 10.16mm(0.4\") avec Capteur")
Qu'est-ce qu'un servomoteur ?
Définition d'un servomoteur
Le terme "servo" fait référence au mécanisme de commande et vient de "servus", le mot latin pour esclave. Les servomoteurs doivent leur nom au fait qu'on peut compter sur eux pour fonctionner "exactement comme prévu".
Un moteur capable de contrôler des paramètres tels que la position et la vitesse est appelé servomoteur, quelle que soit la manière dont ce contrôle est effectué. Par conséquent, le terme est parfois utilisé pour inclure les moteurs pas à pas et les moteurs sans noyau.
Toutefois, dans le contexte de nos intentions, un servomoteur sera défini comme un moteur doté d'un encodeur (détecteur de mouvement de rotation) et d'un pilote qui utilise les informations de cet encodeur pour contrôler la vitesse et la position (angle de rotation).
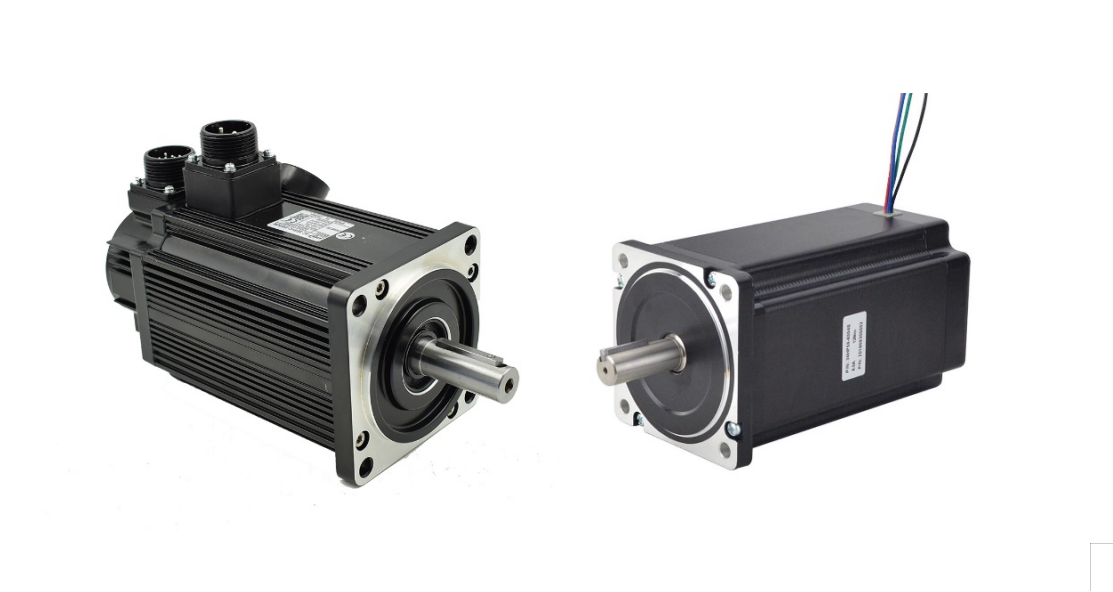
Différences entre les servomoteurs et les moteurs pas à pas
Comme les servomoteurs, les moteurs pas à pas sont capables de contrôler leur angle de rotation en réponse à des entrées externes. Ils peuvent donc également être utilisés pour les machines de positionnement et autres applications similaires. Il existe cependant de nombreuses différences entre ces deux types de moteurs.
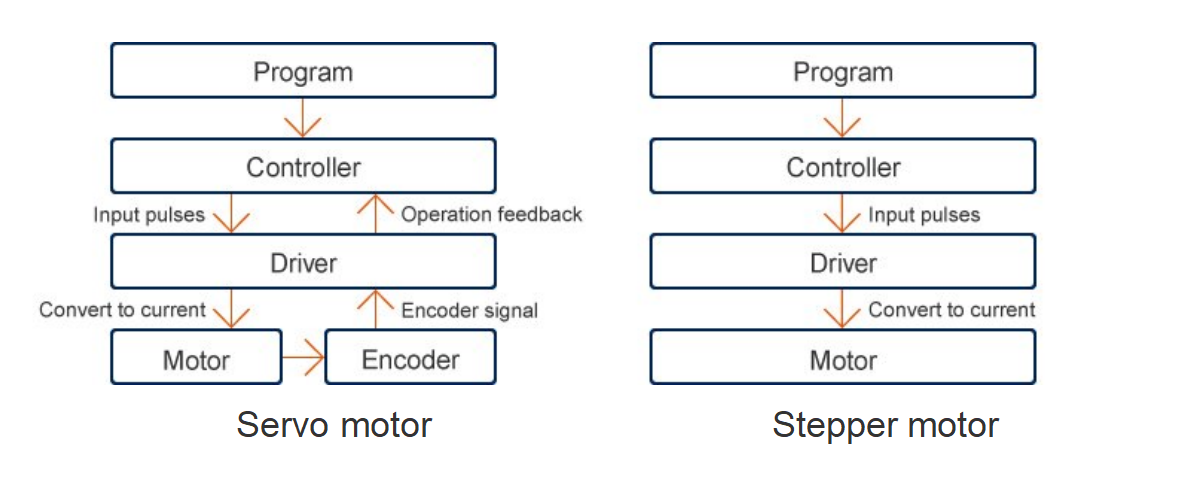
1. Mécanisme de commande
Les servomoteurs sont équipés d'un encodeur (détecteur de mouvement de rotation) qui localise leur position de rotation et fournit un contrôle en retour de la position du moteur. De cette manière, la précision d'arrêt est assurée et le moteur est capable de revenir à sa position initiale en cas d'écart par rapport à la position du moteur au moment de l'arrêt. En revanche, pour les moteurs pas à pas, l'angle de rotation du moteur est proportionnel au nombre d'impulsions d'entrée. Par conséquent, il contrôle la position en fonction du nombre d'impulsions d'entrée reçues du contrôleur. Bien que la nécessité d'un capteur de position soit évitée, cela signifie également l'absence de moyens de détection des écarts de position. Par exemple, des changements inattendus dans la charge peuvent entraîner une désynchronisation du moteur (ce qui signifie que le moteur tourne à un angle différent de celui spécifié par l'entrée).
2. Couple et vitesse
Les servomoteurs peuvent fonctionner à des vitesses élevées et fournir un couple fiable sur une large plage de vitesses, de la plus basse à la plus élevée. Les moteurs pas à pas peuvent fournir un couple élevé à faible vitesse, mais leur couple diminue à mesure que la vitesse augmente, ce qui les rend moins adaptés au fonctionnement à grande vitesse.
3. Coût
Comme les servomoteurs nécessitent un codeur rotatif et un servocontrôleur (pilote), ils sont plus chers que les moteurs pas à pas.
Pour en savoir plus sur les servomoteurs et les moteurs pas à pas, cliquez sur le lien suivant : Servomoteur et moteur pas à pas.
Histoire des servomoteurs
À partir des années 1950, l'intérêt pour l'automatisation des usines a commencé à croître aux États-Unis, d'abord dans des domaines tels que les convoyeurs à bande, les machines automatiques et les robots industriels. Les premières machines automatisées et les premiers robots industriels avaient tendance à utiliser des techniques hydrauliques ou pneumatiques pour contrôler le positionnement des actionneurs, mais ils souffraient de problèmes en termes de précision, de fiabilité opérationnelle, de tuyauterie associée, de fuites d'huile hydraulique ou d'air.
Par la suite, avec les améliorations technologiques, l'utilisation des servomoteurs à courant continu a augmenté au cours des années 1950 et 1960 et ils ont commencé à être installés dans les robots industriels pour remplacer les mécanismes hydrauliques et pneumatiques gênants.
Les progrès des robots industriels se sont accompagnés de grandes avancées technologiques dans le domaine des servomoteurs. Les servomoteurs à courant alternatif sont apparus dans les années 1980. Leurs avantages pratiques incluent la réduction de la taille et de la masse des robots et, par conséquent, les servomoteurs sont largement utilisés dans les machines industrielles modernes.

Types de servomoteurs
Les servomoteurs peuvent être divisés en deux catégories : les servomoteurs à courant continu et les servomoteurs à courant alternatif.
1. Servomoteurs à courant continu
Il s'agit de servomoteurs entraînés par des moteurs à courant continu (CC) brossés. Les moteurs à courant continu sont plus faciles à contrôler que les moteurs à courant alternatif. Ils sont largement utilisés en raison de leur petite taille et de leur faible coût, mais l'utilisation des moteurs à courant continu a récemment diminué en raison des progrès réalisés dans la technologie de contrôle des moteurs à courant alternatif.
2. Servomoteurs à courant alternatif
Il s'agit de servomoteurs entraînés par des moteurs à courant alternatif (CA). Bien qu'ils soient plus difficiles à contrôler que les moteurs à courant continu, les progrès de la technologie de contrôle en ont fait le type de servomoteur le plus courant.
En fonction de leur mécanisme d'entraînement, les servomoteurs à courant alternatif peuvent être divisés en deux catégories : les moteurs synchrones (SM) et les moteurs à induction (IM). Ils se distinguent par la présence ou l'absence d'un aimant permanent.
Les SM contiennent un aimant permanent. Afin d'augmenter la puissance du moteur, l'utilisation d'aimants permanents doit augmenter. Les aimants permanents sont chers et le coût du moteur devient élevé. C'est pourquoi ils sont largement utilisés dans les applications de faible puissance (jusqu'à 10 kW). Cependant, avec la disponibilité d'aimants permanents à haute performance ces dernières années, les servomoteurs synchrones à courant alternatif sont désormais le choix préféré par défaut.
Les IM n'utilisent pas d'aimants permanents et tendent à être utilisés pour des applications de plus grande puissance (10 kW ou plus).

Applications des servomoteurs
Grâce à leurs caractéristiques de positionnement précis, les servomoteurs sont largement utilisés dans des applications telles que les robots industriels et les machines de précision. Voici quelques exemples d'applications :
- articulations de robots industriels
- Articulations de robots humanoïdes
- Contrôle des équipements dans les machines de transformation des aliments
- Contrôle des équipements dans les machines d'emballage
- Entraînements par courroie dans les systèmes de convoyage
- Portes automatiques dans les trains
- Tables X-Y utilisées dans les machines d'inspection des écrans LCD et des semi-conducteurs
- Presses/chargeurs de rouleaux
- Plateaux rotatifs pour machines-outils ou systèmes d'inspection
- Contrôle des presses
- Contrôle des machines de collage
- Contrôle des machines de moulage de plastique
- Contrôle de machines d'amusement
- Radiocommande et autres applications de loisirs
- Machines d'enduction ou de dépôt en phase vapeur
- Machines de nettoyage par centrifugation pour écrans LCD et semi-conducteurs
 20-50VDC")
 Servomoteur 20-50VDC - Arbre court")
 20-50VDC")
 Servomoteur 20-50VDC")
 20-50VDC")
 20-50VDC Servo Motor - Short Shaft")
 3 000tr/min 24-60V CC avec Modbus RS485")
 3000rpm 24-70VDC avec Modbus RS485")
 3000rpm 24-70VDC avec Modbus RS485")
 3000rpm 24-70VDC avec Modbus RS485")

