



















































 Plomb 10.16mm(0.4\") avec Capteur")
 Plomb 10.16mm(0.4\") avec Capteur")
Un article vous permet de tout savoir sur les moteurs pas à pas
Veuillez cliquer directement sur le chapitre qui vous intéresse.
● Qu'est-ce qu'un moteur pas à pas?
Un moteur pas à pas est un moteur à courant continu synchrone sans balais qui convertit les impulsions numériques en rotation d'un axe mécanique. Contrairement à de nombreux autres types de moteurs standard, un moteur pas à pas ne tourne pas en continu pendant un certain nombre de tours jusqu'à ce que la tension continue qui lui est délivrée soit coupée. Il comporte plusieurs bobines organisées en groupes, appelés "phases". Si chaque phase est allumée tour à tour, le moteur tourne pas à pas.
Les moteurs pas à pas divisent l'ensemble du mouvement de rotation en plusieurs étapes égales. Tant que le moteur est correctement dimensionné pour le couple et la vitesse de l'application, la position du moteur peut être contrôlée pour se déplacer dans l'une de ces étapes et y rester. sans aucun retour d'un capteur de position.
De plus, un moteur pas à pas est un dispositif d'entrée et de sortie numérique. Il est particulièrement adapté aux applications dans lesquelles le signal de commande est sous forme d'impulsions numériques et non sous forme de tensions analogiques. Une impulsion numérique envoyée à un moteur pas à pas. Le pilote de moteur amène le moteur à augmenter un certain angle de mouvement. À mesure que la fréquence des impulsions numériques augmente, le mouvement pas à pas devient une rotation continue.
Grâce au fonctionnement pas à pas contrôlé par ordinateur, vous pouvez obtenir un positionnement et/ou un contrôle de vitesse très précis. En conséquence, les moteurs pas à pas sont devenus le moteur de choix pour de nombreuses applications de contrôle de mouvement de précision.
● Comment fonctionne le moteur pas à pas?
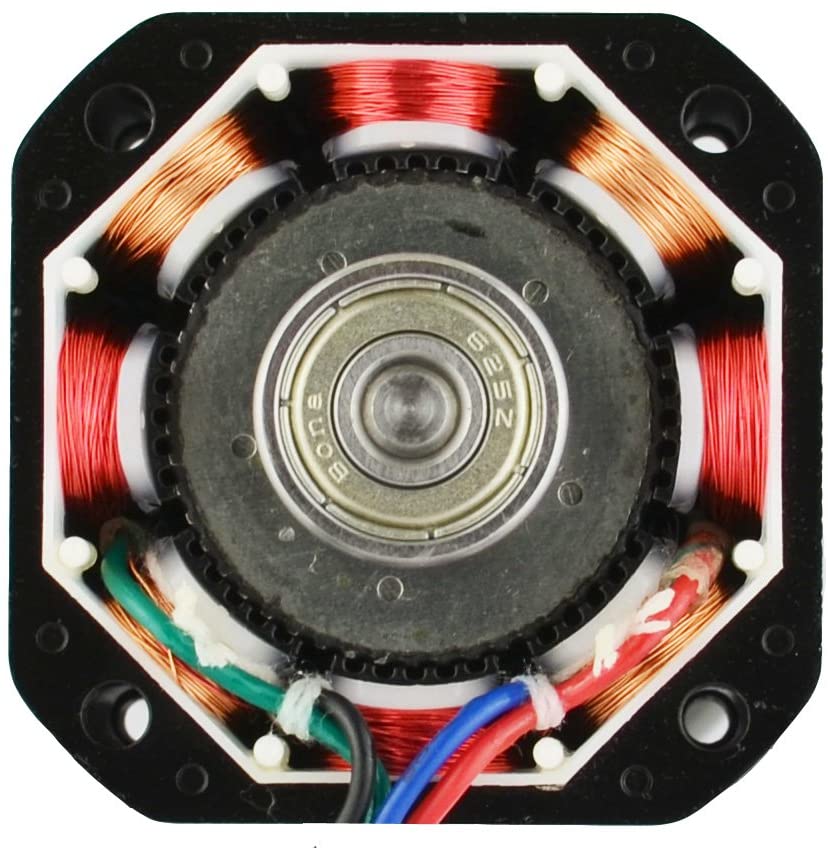
Lorsque le courant circule à travers l'enroulement du stator, l'enroulement du stator génère un champ magnétique vectoriel. Ce champ magnétique entraînera la rotation du rotor selon un certain angle afin que la direction du champ magnétique du rotor soit cohérente avec la direction du stator. champ magnétique. Lorsque le champ magnétique vectoriel du stator tourne d'un angle. Le rotor tourne également selon un angle par rapport à ce champ magnétique. Chaque fois qu'une impulsion électrique est entrée, le moteur tourne d'un angle et avance d'un pas. Sa sortie angulaire Le déplacement est proportionnel au nombre d'impulsions d'entrée et sa vitesse de rotation est proportionnelle à la fréquence d'impulsion. Changez l'ordre dans lequel les enroulements sont alimentés et le moteur inversera la direction. Par conséquent, la rotation du moteur pas à pas peut être contrôlée en contrôlant le nombre d'impulsions, la fréquence et la séquence d'excitation de chaque enroulement de phase du moteur.
Les types courants de moteurs ont des noyaux de fer et des bobines d'enroulement à l'intérieur. L'enroulement a une résistance et provoquera des pertes lorsque l'électricité est appliquée. L'ampleur de la perte est proportionnelle à la résistance et au carré du courant. C'est ce que nous faisons souvent. appelez la perte de cuivre. Si le courant n'est pas un courant continu standard ou une onde sinusoïdale, une perte harmonique se produira également ; le noyau de fer aura une hystérésis. L'effet des courants de Foucault produit également des pertes dans le champ magnétique alternatif, et sa taille est liée au matériau. , courant, fréquence et tension. C'est ce qu'on appelle la perte de fer.
Les pertes de cuivre et de fer apparaissent sous forme de chaleur, affectant l'efficacité du moteur. Les moteurs pas à pas recherchent généralement une précision de positionnement et un couple de sortie, et leur efficacité est relativement faible. Le courant est généralement plus important et a un contenu harmonique plus élevé. La fréquence d'alternance du courant change également avec le changement de la vitesse de rotation. Par conséquent, il est courant que les moteurs pas à pas chauffent, plus que la normale.
Le moteur convertit l'énergie électrique en énergie mécanique, et le moteur pas à pas est un élément de contrôle en boucle ouverte qui convertit les signaux d'impulsion électrique en déplacement angulaire ou en déplacement linéaire. Dans des conditions de non-surcharge, la vitesse et la position d'arrêt du moteur dépendent uniquement de La fréquence et le nombre d'impulsions du signal d'impulsion et ne sont pas affectés par les changements de charge. En d'autres termes, si un signal d'impulsion est ajouté au moteur, le moteur tournera d'un angle de pas. L'existence de cette relation linéaire, couplée à les caractéristiques du moteur pas à pas qui n'a que des erreurs périodiques et aucune erreur accumulée. Cela rend très simple l'utilisation de moteurs pas à pas pour contrôler la vitesse, la position et d'autres zones de contrôle.
● Taille du moteur pas à pas
Les moteurs pas à pas sont classés par taille de châssis, par exemple "Nema 17" ou "Nema 23". Vous êtes-vous déjà demandé comment cela se produit ou ce que cela signifie? L'American Electrical Manufacturers Association établit des normes pour de nombreux produits électriques, y compris les moteurs pas à pas. De manière générale. En parlant parlant, "Nema 17" signifie que la surface de montage du moteur est de 1,7 pouces carrés. Par conséquent, les dimensions du moteur pas à pas Nema 23 sont de 2,3 pouces carrés. Ou 57mm comme indiqué ci-dessous.
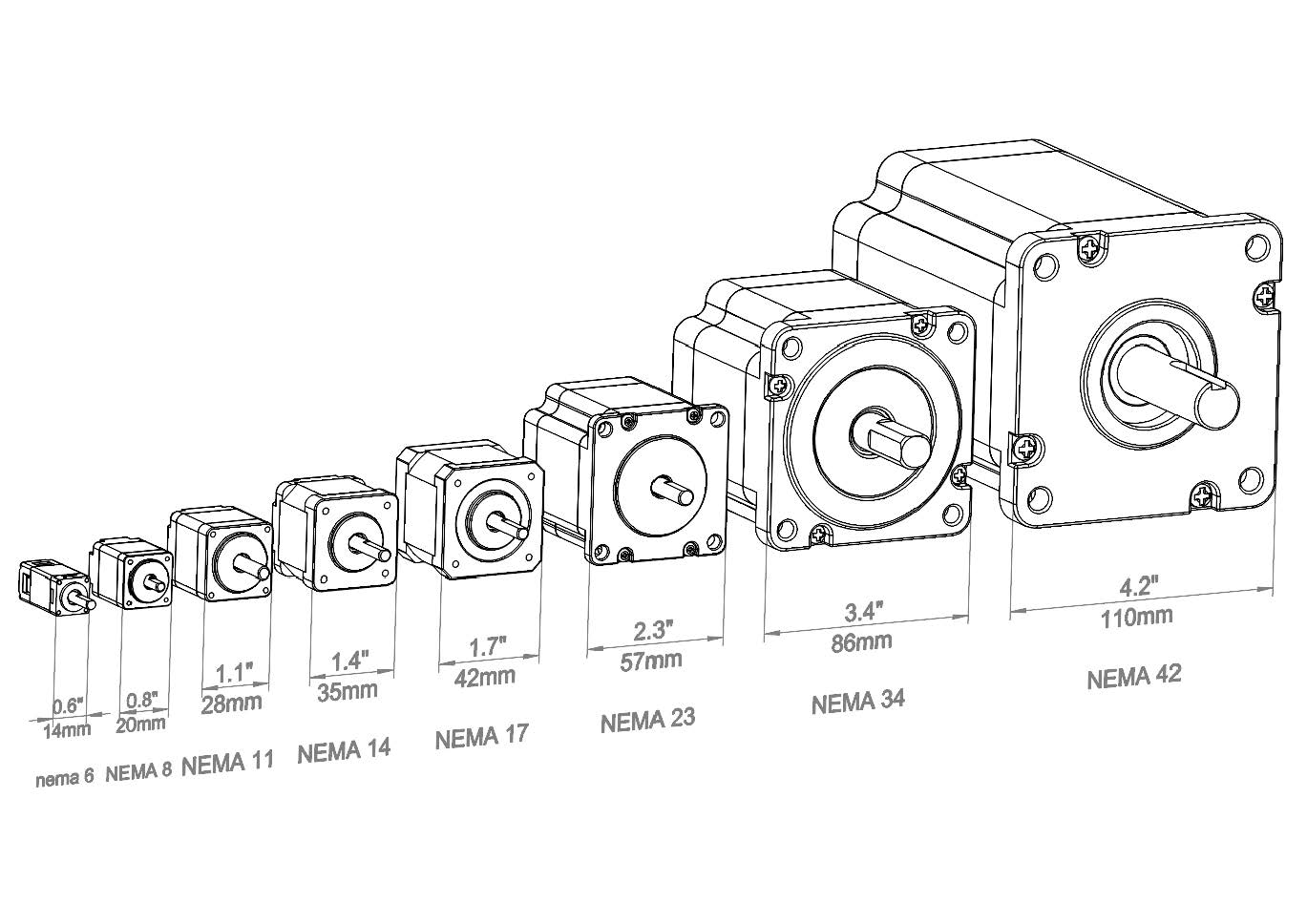
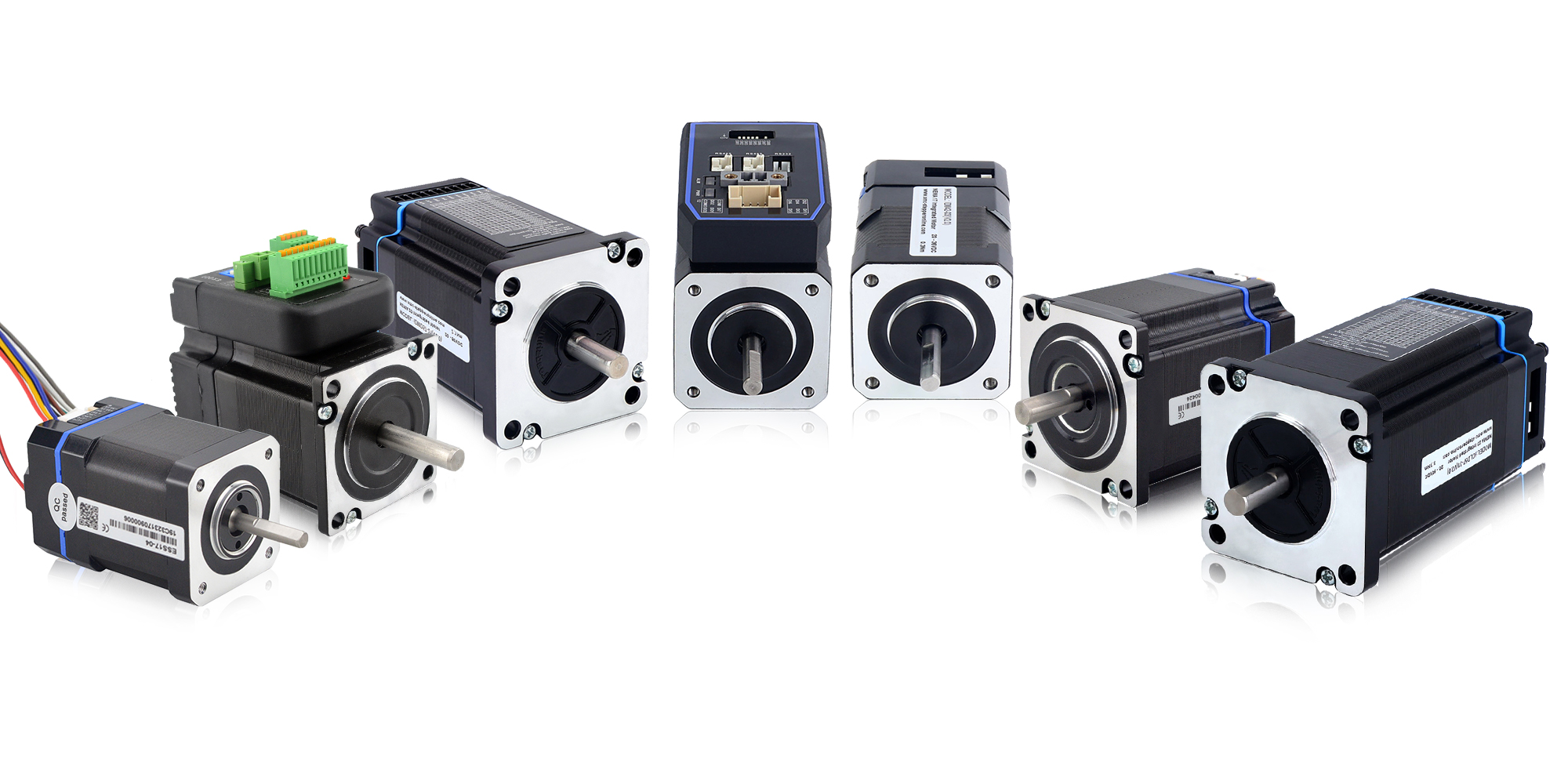
La photo ci-dessous comprend les moteurs pas à pas Nema de tailles 06, 08, 11, 14, 17, 23, 24, 34 et 42. La taille 24 est un peu une anomalie : il n'y a pas de définition officielle Nema pour la taille 24. Elle se monte de manière similaire à la taille 23, mais est légèrement plus large (environ 4 mm), permettant l'utilisation de rotors et de stators plus grands et donc environ 30 % de couple en plus.

Essentiellement, les fabricants s'accordent sur la norme proposée. Cela donne aux fabricants une plus grande flexibilité de conception, car ils savent à l'avance qu'un moteur Nema 17 s'adaptera à un autre support Nema 17 sans avoir à repenser quoi que ce soit ; surtout s'ils choisissent de changer de fournisseur de moteur.
● Types de moteurs pas à pas
Il existe de nombreux types de moteurs pas à pas vendus par STEPPERONLINE, et comprendre les caractéristiques et les utilisations des différents types de moteurs pas à pas vous aidera à décider quel type vous convient le mieux.
Le moteur pas à pas hybride est une combinaison de moteur à réluctance variable et à aimant permanent. Le stator est stimulé électromagnétiquement comme un moteur pas à pas à réluctance variable, et le rotor du moteur pas à pas est magnétisé axialement comme un moteur pas à pas à aimant permanent. Ce moteur pas à pas est un actionneur qui convertit l'électricité. impulsions en déplacement angulaire.
Par rapport aux deux autres types de moteurs pas à pas, les moteurs pas à pas hybrides fournissent un couple plus élevé avec un angle de pas plus petit et ont une meilleure propriété dynamique. Avec le développement de la science et de la technologie, en particulier le développement des matériaux à aimants permanents, de la technologie des semi-conducteurs et de la technologie informatique, ces Les moteurs pas à pas ont été largement utilisés dans les industries de l'automatisation industrielle, de la robotique, du textile et de la médecine.
Un moteur pas à pas en boucle fermée est un moteur pas à pas avec un encodeur ajouté à l'extrémité du moteur pour obtenir un contrôle en boucle fermée. Le contrôle en boucle fermée d'un moteur pas à pas est un système d'asservissement qui utilise un retour de position et/ou un retour de vitesse pour Déterminez le changement de phase approprié à la position du rotor, ce qui peut améliorer considérablement les performances du moteur pas à pas sans perdre de pas.
Le moteur pas à pas en boucle fermée adopte une structure à double enroulement et son moteur utilise un encodeur linéaire de haute précision. Chaque fois que le moteur tourne d'un cadre, l'encodeur émet une impulsion, de sorte que la position de rotation précise du moteur puisse être obtenu, alors que les moteurs pas à pas ordinaires n'en ont qu'un. La position de l'enroulement et la rotation du moteur ne sont pas fiables.

Le moteur pas à pas en boucle fermée adopte un contrôle de verrouillage, qui nécessite l'entrée d'une impulsion de référence. Grâce au contrôle par rétroaction, l'impulsion de contrôle peut être synchronisée. La position de rotation du moteur peut être maintenue constante, tandis que le moteur pas à pas ordinaire adopte Contrôle en boucle ouverte et n'a pas besoin d'entrer une impulsion de référence. Seules la fréquence de pas et la direction du moteur doivent être contrôlées, et la position de rotation du moteur est incontrôlable.
Par rapport aux moteurs pas à pas ordinaires, les moteurs pas à pas en boucle fermée ont des capacités de réponse dynamique plus élevées et peuvent obtenir un contrôle précis de la position de rotation avec de petites erreurs de position. De plus, ils ont une haute précision et la précision de la position peut être contrôlée à 0,1 degrés près. la précision de position des moteurs pas à pas ordinaires ne peut être contrôlée qu'à 1 degré près, avec une mauvaise stabilité de fonctionnement et de grandes erreurs de position.
De plus, les moteurs pas à pas en boucle fermée ont une capacité de charge plus élevée et peuvent supporter des charges plus importantes, tandis que les moteurs pas à pas ordinaires ont une capacité de charge inférieure et ont une endurance plus faible.
Les moteurs pas à pas intégrés combinent des entraînements pas à pas et des moteurs en une seule unité. Les moteurs pas à pas intégrés offrent une conception peu encombrante qui réduit le câblage et permet d'économiser des coûts par rapport aux composants de moteur et d'entraînement séparés. Ils sont idéaux pour des applications telles que l'emballage et l'étiquetage, tests et mesures automatisés, assemblage automatisé et sciences de la vie.
Les autres avantages de l'intégration des moteurs et des unités d'entraînement incluent la facilité de mise en œuvre, une complexité de câblage réduite, une configuration et une conception plus rapides du système et une compatibilité moteur-entraînement garantie.
● Moteur pas à pas à aimant permanent
Les moteurs à aimant permanent utilisent un aimant permanent (PM) dans le rotor et fonctionnent avec l'attraction ou la répulsion entre l'aimant du rotor et les électro-aimants du stator. Le rotor du moteur pas à pas à aimant permanent est en acier à aimant permanent. Le stator du Le moteur pas à pas est transformé en un pôle denté en forme de griffe par méthode d'estampage, et le rotor adopte un acier magnétique à aimant permanent avec une magnétisation multipolaire radiale. Le champ magnétique généré par la direction du courant de la bobine s'exclut mutuellement avec le champ magnétique du rotor. champ, de sorte que le moteur tourne en sens inverse.
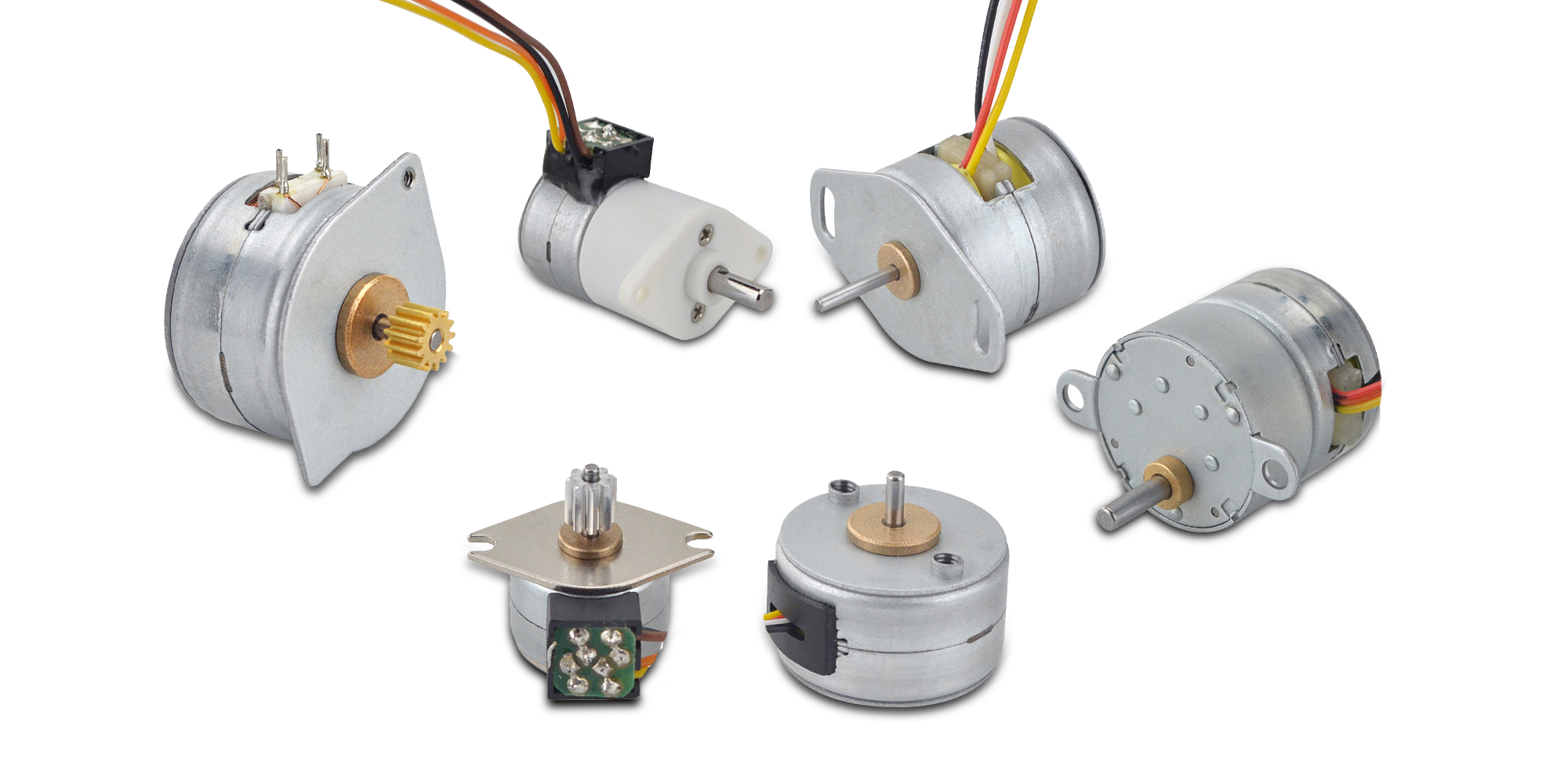
Ce moteur pas à pas est également connu sous le nom de moteur pas à pas pm, la direction axiale de l'ensemble du stator et du rotor du moteur est divisée en deux sections, et le milieu est séparé par une pièce de séparation magnétique. Les deux sections sont mutuellement séparées par un pas. angle, et chacun se compose d'un stator, d'un rotor et d'un enroulement annulaire qui est manchonné sur le stator. Le moteur pas à pas pm est principalement utilisé dans les équipements périphériques informatiques, les systèmes photographiques, les dispositifs combinés optoélectroniques, le contrôle des vannes, les réacteurs nucléaires, les terminaux bancaires, Machines-outils CNC, bobineuses automatiques, montres électroniques et équipements médicaux, etc.
● Moteur pas à pas à réluctance variable
Un moteur pas à pas à réluctance variable est un type de moteur électrique qui fonctionne sur le principe de la réluctance magnétique. Ce moteur est construit avec un rotor en fer et plusieurs enroulements de stator. Les enroulements sont magnétisés dans une séquence spécifique, provoquant le mouvement du rotor. par étapes discrètes.
Les moteurs pas à pas à réluctance variable offrent des taux de pas élevés et un bon couple à basse vitesse. Cependant, à des vitesses plus élevées, les performances peuvent être moins satisfaisantes en raison de problèmes de résonance.
Les moteurs pas à pas à réluctance variable sont considérés comme robustes et fiables, ce qui les rend adaptés aux environnements dans lesquels le moteur peut être soumis à des conditions difficiles.
L'un des principaux inconvénients des moteurs pas à pas à réluctance variable est qu'ils ont tendance à être plus bruyants que les autres types de moteurs pas à pas. En effet, le rotor est mal amorti, ce qui entraîne des niveaux de vibrations mécaniques plus élevés.
Les moteurs pas à pas linéaires sont un type spécial de moteur pas à pas dont la conception et les principes de fonctionnement sont différents des moteurs pas à pas rotatifs traditionnels. Un moteur pas à pas linéaire est un moteur linéaire qui réalise un déplacement linéaire grâce à un mouvement linéaire plutôt que le mouvement de rotation obtenu par un moteur pas à pas traditionnel. moteurs. La structure d'un moteur pas à pas linéaire se compose généralement d'un stator fixe et d'un curseur mobile. Le stator est équipé de bobines à l'intérieur et le curseur est équipé d'aimants permanents. Lorsque le courant traverse la bobine du stator, un champ magnétique est généré. entre l'aimant permanent sur le curseur et le champ magnétique du stator génère une force d'attraction ou de répulsion, provoquant ainsi le déplacement linéaire du curseur sur l'axe fixe. Le contrôle d'un moteur pas à pas linéaire est similaire à un moteur pas à pas traditionnel. En contrôlant la direction et l'amplitude du courant, la position et la vitesse du curseur peuvent être contrôlées. Le signal d'impulsion de chaque moteur pas à pas déplace le curseur d'un pas fixe, de sorte qu'un déplacement linéaire précis puisse être obtenu.

Il existe trois types courants de moteurs pas à pas linéaires, à savoir l'entraînement externe, l'arbre traversant et l'arbre fixe. Ils peuvent être sélectionnés en fonction des indicateurs clés d'applications spécifiques. Les moteurs pas à pas linéaires présentent les avantages d'une haute précision, d'un zéro zéro. transmission du jeu et réponse rapide, ils sont donc privilégiés dans les applications qui nécessitent un contrôle de mouvement linéaire haute performance.
● Unipolaire vs bipolaire
Un moteur pas à pas est un moteur qui contrôle l'angle de rotation au moyen d'impulsions électriques. Les moteurs pas à pas bipolaires et les moteurs pas à pas unipolaires sont deux types courants de moteurs pas à pas. La principale différence entre eux réside dans la méthode de contrôle. Un moteur pas à pas bipolaire doit inverser le courant pour changer la direction du rotor, il nécessite donc 4 électrodes pour contrôler la direction, chaque électrode a deux états (ON/OFF).
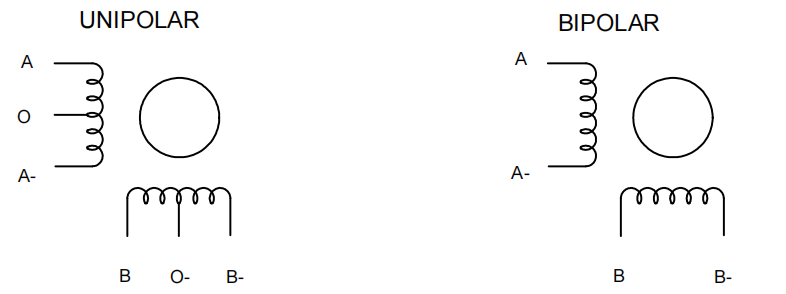
Un moteur pas à pas unipolaire n'a besoin que de deux électrodes pour contrôler la rotation du rotor, et le moteur tourne en changeant le sens du courant. Par conséquent, par rapport aux moteurs pas à pas bipolaires, les moteurs pas à pas unipolaires n'ont besoin que de 2 électrodes pour obtenir le même résultat. contrôle de mouvement. Cependant, étant donné que les moteurs pas à pas unipolaires nécessitent l'ajout d'un pilote unipolaire dans le circuit de commande, la complexité du circuit est légèrement plus élevée.
Les moteurs pas à pas bipolaires et les moteurs pas à pas unipolaires ont chacun leurs propres avantages et inconvénients, et le moteur approprié peut être sélectionné en fonction du scénario d'application spécifique.
Les avantages des moteurs pas à pas bipolaires sont un couple élevé, une vitesse rapide, une haute précision et un contrôle simple, ils sont donc souvent utilisés dans des situations où un contrôle à grande vitesse et de haute précision est requis. Le couple et la précision des moteurs pas à pas unipolaires sont comparés à ceux des moteurs pas à pas bipolaires. Le moteur est moins bon et plus lent. De plus, les pilotes utilisés dans les moteurs pas à pas unipolaires sont coûteux et ont moins d'options.
● Comment choisir un moteur pas à pas, un pilote et une alimentation?
● Choisissez un moteur pas à pas
Les moteurs pas à pas sont un bon choix lorsque vous avez besoin de contrôler un mouvement. Ils peuvent être utilisés dans des scénarios où le contrôle de l'angle de rotation, de la vitesse, de la position et de la synchronisation est requis.
Ainsi, lorsque nous choisissons un moteur pas à pas, plusieurs facteurs doivent être pris en compte.
1. Comment le moteur est-il couplé à la charge ?
Après avoir déterminé le type d'accouplement entre le moteur et la charge, vous pouvez sélectionner un moteur pas à pas en fonction de la longueur, du diamètre et du type d'arbre. Actuellement, les moteurs pas à pas standard STEPPERONLINE ont une variété de longueurs d'arbre, de diamètres d'arbre et de types d'arbre, et peut fournir divers services personnalisés pour l'arbre du moteur.2. À quelle vitesse la charge doit-elle se déplacer ou accélérer ?
Lors du choix du bon moteur, vous devez tenir compte de l'équilibre entre la vitesse et la charge. Pour certains équipements nécessitant un mouvement rapide, nous pouvons choisir des moteurs à grande vitesse, mais si la charge est plus importante, nous devons choisir un moteur avec couple plus élevé.Par conséquent, lors de la sélection d'un moteur, vous devez considérer l'équilibre entre la vitesse et la charge en fonction des besoins réels, et choisir un moteur qui peut satisfaire à la fois la vitesse de déplacement et la charge. Ce qui suit est la vitesse maximale et la vitesse recommandée de chaque taille de moteur dans des conditions sans charge.
| Vitesse sans charge | |||
| Type de moteur | Dimensions(mm) | Vitesse maximale (rpm) | Vitesse de travail recommandée(rpm) |
| Moteur en boucle ouverte | Nema 6(14x14) | 1000 | 100-600 |
| Nema 8(20x20) | 1000 | 100-600 | |
| Nema 11(28x28) | 1000 | 100-600 | |
| Nema 14(35x35) | 1000 | 100-600 | |
| Nema 16(40x40) | 1000 | 100-500 | |
| Nema 17(42x42) | 1000 | 100-500 | |
| Nema 23(57x57) | 1000 | 100-500 | |
| Nema 24(60x60) | 1000 | 100-500 | |
| Nema 34(86x86) | 1000 | 100-400 | |
| Nema 42(110x110) | 500 | 100-300 | |
| Moteur en boucle fermée | Nema 8(20x20) | 2000 | 100-1500 |
| Nema 11(28x28) | 2000 | 100-1500 | |
| Nema 14(35x35) | 2000 | 100-1000 | |
| Nema 17(42x42) | 2000 | 100-1000 | |
| Nema 23(57x57) | 1500 | 100-1000 | |
| Nema 24(60x60) | 1500 | 100-1000 | |
| Nema 34(86x86) | 1500 | 100-1000 | |
Vous pouvez également déterminer si le moteur répond à vos exigences de vitesse de charge en vous basant sur le diagramme de courbe du moteur.
3. Quel couple est nécessaire pour déplacer la charge ?
La plupart des moteurs ont des couples nominaux. C'est ce que vous devez examiner pour décider si le moteur a la force de faire ce que vous voulez. Le couple de maintien d'un moteur pas à pas est similaire à la "puissance" d'un moteur conventionnel. Cependant, la structure physique des moteurs pas à pas est complètement différente de celle des moteurs à courant alternatif et à courant continu, et la puissance de sortie du moteur varie en fonction de la vitesse, du courant et de la tension d'entrée.
D'une manière générale, si le couple requis est inférieur à 0,8N.m, choisissez Nema 8 (20x20 mm), Nema 11 (28x28 mm), Nema 14 (35x35 mm), Nema 16 (39x39 mm), Nema 17 (42x42 mm) ; si le couple est d'environ 1N.m, choisissez un moteur pas à pas Nema 23. Si le couple est supérieur à plusieurs N.m, vous devez choisir un moteur pas à pas avec des spécifications telles que Nema 34 et Nema 42.
4. Quelle précision est requise lors du positionnement d'une charge ?
La précision des moteurs pas à pas augmente lorsque les pas sont plus petits. En effet, un tour est divisé en pas plus nombreux et plus prudents, ce qui laisse moins de place à l'erreur. Un moteur pas à pas avec un angle de 0,9 °, par exemple, fournit une précision supérieure à celle d'un moteur pas à pas avec un angle de 1,8°.
Une idée fausse courante est que les moteurs pas à pas de 1,8° fonctionnant à demi-pas obtiendront la même précision que les moteurs pas à pas de 0,9° fonctionnant à pas complets. Une autre idée fausse est que le couple est perdu lors de l'utilisation d'un moteur pas à pas de 0,9°. Ces hypothèses sont incorrectes. et une compréhension des caractéristiques de conception mécanique peut expliquer pourquoi.
En général, les moteurs pas à pas de 0,9° conviennent mieux aux applications à grande vitesse et haute précision. À l'inverse, les moteurs pas à pas de 1,8° offrent un couple plus élevé mais une précision moindre. Des moteurs pas à pas de 0,9° avec une conception brevetée à 12 pôles sont également disponibles. des moteurs plus avancés combinent les caractéristiques des moteurs à 0,9° et 1,8° et offrent une grande précision et un couple plus élevé.
● Choisissez le pilote de moteur pas à pas
Pour tirer le meilleur parti de votre moteur pas à pas, vous devez utiliser le pilote approprié. Lors de la sélection d'un pilote, il y a trois éléments clés à garder à l'esprit : la tension, le courant, le micropas et le nombre de phases. Chacun joue un rôle important rôle important dans les performances du moteur. Le fait de ne pas prendre en compte ces paramètres peut entraîner des performances médiocres, un bruit plus fort, voire une surchauffe et une panne du moteur, entraînant une perte de temps de production et une augmentation des coûts de maintenance.
1. Tension nominale
Le dépassement de la tension nominale maximale du moteur ou son fonctionnement avec une tension d'alimentation plus élevée peut entraîner un dysfonctionnement du moteur. Pour cette raison, vous devez connaître la tension nominale maximale ou la tension nominale typique du moteur à partir de la description du produit ou la courbe de couple lors de la sélection d'un pilote de moteur pas à pas. Les moteurs pas à pas sont généralement alimentés par des pilotes qui fonctionnent en courant alternatif (120 V ou 240 V) ou en courant continu basse tension (comme 24V, 36V ou 48V). Si vous faites fonctionner un moteur à une tension plus élevée que spécifié, comme un moteur évalué à 24V CC, à une tension élevée, le moteur surchauffera rapidement. À l'inverse, un moteur fonctionnant à une tension trop basse (par exemple, un moteur haute tension fonctionnant à 24V CC) produira moins de puissance et peut provoquer le le moteur cale si la charge n'est pas réduite.
2. Note actuelle
Assurez-vous que le pilote est adapté à une large plage de courant afin de pouvoir tester le système à différentes tensions adaptées à votre application. Pour le courant nominal, vous devez prendre en compte à la fois le courant continu ou effectif et le courant de crête. Dans les moteurs à courant continu avec et sans balais, la force contre-électromotrice n'est pas présente au démarrage et à l'arrêt et le conducteur ne voit que la résistance d'enroulement du moteur. Il y a donc une surintensité avant que le moteur ne tourne et génère une force contre-électromotrice qui est opposée. à la tension d'alimentation, ce qui réduit la consommation de courant. Même si votre application ne nécessite qu'un maximum de 1A de courant continu en fonctionnement normal, elle peut devoir traiter 2 à 3 fois, voire plus, de courant continu au démarrage et au calage.
3. Micropas
Les moteurs pas à pas se déplacent par pas qui sont normalement de 1,8°, soit 200 pas par tour. Cela peut être un problème si nous avons besoin de petits mouvements. Une option serait d'utiliser une sorte de boîte de vitesses, mais il existe une autre option : le micropas. Le micropas signifie que nous pouvons faire plus de 200 pas par tour et donc des mouvements plus petits.
Lorsque vous faites fonctionner des moteurs pas à pas avec des pas complets, la sortie du pilote du moteur pas à pas ressemble à un signal d'onde carrée et génère des mouvements grossiers. Plus les micropas sont grands, plus le signal de sortie ressemble à une onde sinusoïdale et le moteur pas à pas bouge davantage. Cependant, cela présente également un inconvénient. À mesure que la valeur du micropas augmente, le couple chute fortement et si la valeur est trop grande, le moteur ne peut pas générer suffisamment de couple pour tourner du tout. Normalement, 1/4, 1/8 ou même 1/16 peut être utilisé pour obtenir des mouvements suffisamment fluides tout en générant suffisamment de couple.
4. Nombre de phases
Les pilotes de moteur pas à pas sont utilisés pour contrôler un nombre spécifique de phases. Pour les moteurs pas à pas unipolaires et bipolaires classiques, des entraînements biphasés sont utilisés, mais les moteurs à réluctance variable utilisent des entraînements triphasés. Avant de sélectionner le pilote, veuillez confirmer la phase. numéro du moteur.
Lorsque vous utilisez un moteur pas à pas, vous aurez besoin d'une alimentation pour alimenter le moteur pas à pas. Une bonne alimentation peut permettre à votre moteur pas à pas de fonctionner à des performances optimales. Au lieu de cela, une mauvaise alimentation peut entraîner de faibles performances ou un gaspillage plus important. d'énergie.
Vous trouverez ci-dessous quelques conseils pour choisir l'alimentation :
| Motor Size | Driving Voltage |
| Nema 8 - Nema 17 | 12 - 24VDC |
| Nema 23, Nema 24 | 24 - 48VDC |
| Nema 34 | 48 - 100VDC/30 - 70VAC |
| Nema 42 - Nema 52 | 110 - 220VAC |
- Confirmez le courant nominal du moteur. Vous pouvez le trouver dans la fiche technique du moteur.
- Confirmez la tension de commande. La tension de commande est le facteur principal lors du choix d'une alimentation. Normalement, une tension plus élevée donnera de meilleures performances.
Le tableau ci-dessous présente les tensions recommandées pour les moteurs pas à pas. Vous pouvez choisir une tension d'entraînement adaptée à votre application.
Calculez la valeur de puissance. Nous vous proposons une formule simple:
P=n*I*V*1.2P: Valeur de puissance
n: Nombre de moteurs pas à pas
I: Courant nominal du moteur
V: tension de conduite
1.2: soit 20 % de marge
Par exemple, 3 unités de moteurs avec un courant nominal de 3A chacun et une tension de commande de 36V, la puissance estimée est d'environ : 3*3A*36V*1,2=388,8W. Vous pouvez donc choisir un fournisseur d'alimentation de 36V 400W
Veuillez noter : La formule n'est qu'une valeur estimée de la puissance, différentes conditions de travail nécessiteront une puissance différente. Par exemple, dans un système à 3 axes, les 3 moteurs ne fonctionnent pas en même temps et les 3 moteurs ne fonctionnent pas avec une puissance maximale. charge, etc. Dans cette condition, la valeur de puissance peut être inférieure à la valeur calculée par la formule.
● Avantages et inconvénients des moteurs pas à pas
Avantages des moteurs pas à pas
- En raison de leur structure interne, les moteurs pas à pas ne nécessitent pas de capteurs pour détecter la position du moteur. Puisque le moteur se déplace par "étapes". , la position du moteur à un moment donné peut être déterminée en comptant simplement ces pas.
- Les moteurs pas à pas sont également très faciles à contrôler. Bien que le moteur nécessite un pilote, il ne nécessite pas de calculs ou de réglages complexes. pour fonctionner correctement. En général, la quantité de travail requise pour le contrôle est inférieure à celle des autres moteurs. Avec la méthode micropas, vous pouvez obtenir une précision de positionnement élevée allant jusqu'à environ 0,007°.
- Les moteurs pas à pas offrent un excellent couple à basse vitesse, sont excellents pour maintenir la position et ont une longue durée de vie.
- Le rotor du moteur pas à pas a une masse importante et une inertie élevée. Il est sujet aux vibrations et au bruit pendant le fonctionnement à grande vitesse, ce qui affecte la stabilité et la précision du mouvement. Il s'agit d'un inconvénient majeur des moteurs pas à pas et des mesures doivent être prises pour atténuer ou éliminer cet effet.
- Le principe de fonctionnement du moteur pas à pas est de contrôler la position et la vitesse. grâce à un contrôle d'impulsion instantané à court terme. Un fonctionnement à long terme peut facilement provoquer un échauffement ou même un grillage du moteur. Pour les applications qui nécessitent un fonctionnement continu pendant de longues périodes, les moteurs pas à pas ne sont peut-être pas le meilleur choix.
● Utilisations et applications du moteur pas à pas
En raison des caractéristiques des moteurs pas à pas, ils sont utilisés dans de nombreuses applications nécessitant un contrôle de position simple et la capacité de maintenir la position, notamment :
1. Imprimantes 3D
Le moteur pas à pas est l'un des composants importants de l'imprimante 3D. Selon le type d'imprimante, ils peuvent être utilisés pour diverses applications. Par exemple, les moteurs pas à pas sont utilisés pour déplacer individuellement une extrudeuse ou une plate-forme de construction le long du x Axes , Y et Z. Généralement, l'ensemble extrudeuse est équipé d'un moteur pas à pas qui tire le filament dans l'extrudeuse.
Les moteurs pas à pas sont uniques dans le sens où ils peuvent se déplacer selon un intervalle connu, puis rester dans cette position. Puisqu'ils peuvent déplacer des objets de manière répétée vers une position fixe, ils sont souvent utilisés dans les robots et les imprimantes.
Les moteurs pas à pas sont disponibles dans de nombreuses tailles. Les tailles les plus couramment utilisées dans les imprimantes 3D sont NEMA 14, NEMA 17, NEMA 23 et NEMA 24.
2. Machines CNC
Les moteurs pas à pas sont un choix alternatif aux servomoteurs et peuvent fournir de l'énergie à la plupart des types de machines CNC. Les applications CNC englobent un large éventail de processus de fabrication où un logiciel informatique préprogrammé contrôle le fonctionnement et le mouvement physique des machines-outils dans les environnements d'usine et de fabrication.Bien que les moteurs pas à pas dans les applications CNC soient souvent considérés comme une alternative plus "économique" aux servomoteurs, il s'agit d'une simplification excessive basée sur des connaissances technologiques obsolètes, et elle n'est pas toujours strictement exacte aujourd'hui. Les moteurs pas à pas ont tendance à être moins chers que les moteurs pas à pas. servomoteurs pour la même puissance, mais les versions modernes sont tout aussi polyvalentes. En conséquence, les moteurs pas à pas trouvent des applications plus répandues et sont présents dans une gamme plus large de machines et de systèmes, des machines-outils aux ordinateurs de bureau et aux automobiles.
Les moteurs pas à pas CNC présentent un avantage crucial par rapport aux servomoteurs dans la mesure où ils ne nécessitent pas d'encodeurs. Les servomoteurs sont intrinsèquement plus difficiles à comprendre et à utiliser que les moteurs pas à pas, en partie parce qu'ils incluent des encodeurs, qui sont plus sujets aux pannes que beaucoup d'autres. composants dans des servomoteurs fiables. Les moteurs pas à pas n'ont pas besoin d'encodeurs, ce qui les rend théoriquement plus fiables que les servomoteurs.
De plus, les moteurs pas à pas sont également sans balais (contrairement aux servomoteurs), ce qui signifie qu'ils ne nécessitent pas de remplacement régulier tant que les roulements sont en bon état de fonctionnement.
3. Objectifs de caméra
Les moteurs pas à pas sont largement utilisés dans diverses applications de la technologie des caméras haut de gamme. Ils peuvent être utilisés pour contrôler des structures internes extrêmement précises, telles que les réglages automatiques de mise au point et d'ouverture au sein de l'objectif. De plus, les moteurs pas à pas trouvent des applications dans le boîtier et structures mécaniques externes des caméras de sécurité et des systèmes de surveillance à distance.
En particulier, les moteurs pas à pas, ainsi que les curseurs électriques de la caméra, permettent un fonctionnement très fluide des dispositifs de positionnement de la caméra. Cela signifie que les objectifs capturés par les dispositifs de sécurité peuvent être maintenus de manière fiable, évitant ainsi les problèmes potentiels de distorsion de l'image causés par les mouvements physiques de la caméra autour de son support. champ de vision. Les moteurs pas à pas offrent plusieurs fonctionnalités intéressantes pour les systèmes de positionnement de caméras et de vidéosurveillance, notamment un couple complet à l'arrêt, des temps de réponse extrêmement précis et instantanés pour toutes les entrées de mouvement, une répétabilité cohérente des mouvements préprogrammés et un contrôle simple en boucle ouverte basé sur des tailles de pas fixes. .
En plus de ce qui précède, les moteurs pas à pas sont également utilisés dans la sécurité, les robots de service, les imprimantes, les scanners, les machines textiles, les machines d'emballage, les lecteurs de disques compacts et l'éclairage intelligent, etc.