Plomb 10.16mm(0.4\") avec Capteur")
 Plomb 5.08mm(0.2\") avec Capteur")
 Plomb 2.54mm(0.1\") avec Capteur")
 Plomb 12.7mm(0.5\") avec Capteur")
 Plomb 8mm(0.314961\") avec Capteur")
 Plomb 12.7mm(0.5\") avec Capteur")
 Plomb 6.35mm(0.25\") avec Capteur")
 Plomb 6.35mm(0.25\") avec Capteur")
 Plomb 2.54mm(0.1\") avec Capteur")
 Plomb 2.54mm(0.1\") avec Capteur")
 Plomb 4mm(0.15748\") avec Capteur")
 Plomb 2mm(0.07874\") avec Capteur")
 Plomb 12.7mm(0.5\") avec Capteur")
 Plomb 6.35mm(0.25\") avec Capteur")
 Plomb 2.54mm(0.1\") avec Capteur")
 Plomb 10.16mm(0.4\") avec Capteur")
 Plomb 5.08mm(0.2\") avec Capteur")
 Plomb 2.54mm(0.1\") avec Capteur")
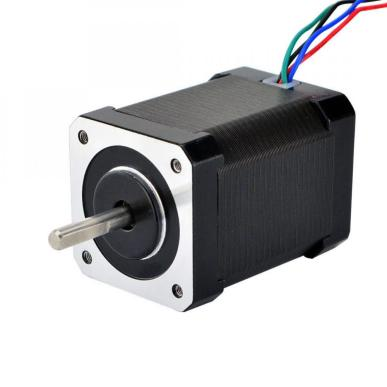
 Moteur pas à pas Nema 34 et pilote et alimentation 60V")
 Moteur pas à pas Nema 34 et pilote et alimentation 60V")
 Moteur pas à pas Nema 34 et pilote et alimentation 60V")
 moteur pas à pas et pilote Nema 23")
 Moteur pas à pas Nema 34 et pilote et alimentation 60V")
 Moteur pas à pas et pilote Nema 34")
 Moteur pas à pas et pilote Nema 23")
 Moteur et pilote pas à pas Nema 34")
 Moteur pas à pas et pilote Nema 34")
 Nema 34 moteur pas à pas et pilote & Alimentation 60V")















Un moteur pas à pas est un dispositif électromécanique convertissant l'énergie électrique en puissance mécanique.Dans le même temps, un moteur pas à pas est un moteur synchrone sans balais qui peut diviser une rotation complète en un grand nombre d'étapes. Lorsqu'un moteur pas à pas est appliqué avec des impulsions de commande électriques dans la séquence appropriée, l'arbre ou la broche du moteur pas à pas tourne par étapes discrètes, permettant un contrôle précis de la position du moteur sans aucun mécanisme de rétroaction, tant que le moteur est dimensionné pour l'application .
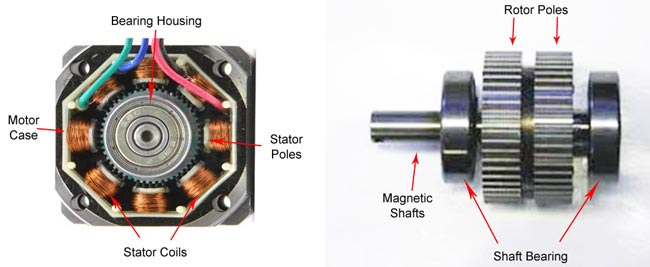
1. Construction de moteurs pas à pas
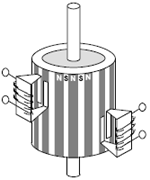
Les moteurs pas à pas se composent généralement d'embouts avant et arrière, de roulements, d'un arbre central, d'un noyau de rotor, d'un noyau de stator, d'un assemblage de stator, de rondelles ondulées, de vis et d'autres pièces.Tes deux parties principales d'un moteur pas à pas sont le stator et le rotor. Ils sont tous deux composés de matériaux magnétiques avec respectivement six et quatre pôles magnétiques. Les six pôles magnétiques du stator comportent des enroulements de commande et les deux pôles opposés forment une phase.
2. Types de moteurs pas à pas
Il existe trois types de base de moteurs pas à pas, rotor réactif : moteur pas à pas à réluctance variable (VR), rotor actif : moteur pas à pas à aimant permanent (PM), combinaison de VR et PM : moteur pas à pas hybride (HY)
Variable reluctance stepper motors
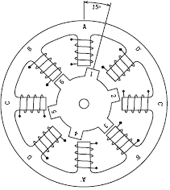
Les moteurs pas à pas à réluctance variable sont le type de moteur pas à pas le plus simple et sont constitués d'un rotor à plusieurs dents en fer doux et d'un stator bobiné. Les deux pôles sont magnétisés lorsqu'un courant continu est appliqué à l'enroulement du stator.
Lorsque les dents du rotor sont attirées vers les pôles du stator sous tension, une rotation se produit. Comme les aimants des moteurs pas à pas à réluctance variable sont plus petits et plus légers que ceux des moteurs pas à pas à aimants permanents, ils sont plus rapides. Plus la zone entre les engrenages du rotor et du stator d'un moteur pas à pas à résistance variable est petite, plus la perte de force magnétique est faible.
Pour ce type de moteur pas à pas, bien que la structure soit simple et facile à contrôler, la résolution est faible et le couple est faible.
Moteurs pas à pas à aimants permanents
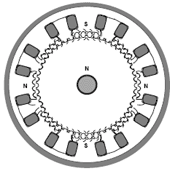
Des aimants permanents sont incorporés dans la structure du moteur du moteur pas à pas à aimant permanent. Le changement de position du rotor sera provoqué par un changement de sens du courant dans les bobines, modifiant les pôles magnétiques.Le rotor tournera de 90° lorsque la direction du courant est correctement modifiée. Ce pas unique du moteur, bien qu'utile dans certaines applications, serait très important et imprécis. Par conséquent, les moteurs à aimants permanents réellement existants ont plus de pôles de rotor et plusieurs aimants montés sur le rotor pour augmenter le nombre de pas et la précision de positionnement.
Les pôles de rotor magnétisés fournissent une plus grande force de flux magnétique, de sorte que les moteurs à aimants permanents présentent de meilleures caractéristiques de couple que les moteurs pas à pas à réluctance variable. La construction simple donne un moteur abordable avec une résolution assez faible.
Moteurs pas à pas hybrides
Les moteurs pas à pas hybrides sont l'un des types de moteurs pas à pas les plus largement utilisés dans l'industrie. Les moteurs pas à pas hybrides combinent les meilleures caractéristiques des moteurs pas à pas à réluctance variable et à aimant permanent, ils sont donc plus chers. Les moteurs pas à pas hybrides offrent de meilleures performances en termes de résolution de pas, de couple et de vitesse.
Le rotor d'un moteur pas à pas hybride est constitué d'aimants permanents, mais contrairement aux modèles évoqués ci-dessus, les aimants ne sont pas montés radialement mais aimantés axialement. Normalement, le rotor est constitué de deux anneaux aimantés opposés placés sur l'arbre du moteur. Il a des rainures fendues dans chaque anneau pour former les dents du rotor.
Le nombre de pas complets par révolution peut être calculé à partir de la formule suivante :
- SPR = NR x Ø
- Where: SPR = nombre de pas par tour
- NR =nombre total de dents du rotor (total pour les deux culasses)
- Ø = nombre de phases moteur
- or: NR = SPR/Ø
| Comparaisons | Moteur pas à pas à réluctance variable (VR) | Moteur pas à pas à aimant permanent (PM) | Moteur pas à pas hybride (HB) |
| Coût | Moyen | Relativement bon marché | Relativement cher |
| Structure de conception | Simple | Moyen | Relativement complexe |
| Résolution | Angle de pas : 1,8°, 0,9° ou moins | Angle de pas : 3°~30° | Angle de pas : 1,8°, 0,9° ou moins |
| Courbe couple-vitesse | Pas de chute de couple significative à haut régime | Couple important à bas régime, chute de couple importante à haut régime | Couple important à bas régime, chute de couple importante à haut régime |
| Bruit | Plus de bruit | Moins de bruit | Plus de bruit (mieux avec la subdivision en micropas) |
| Production de chaleur | Élévation élevée de la température (besoin d'un dissipateur de chaleur) | Faible montée en température | Faible montée en température |
| Subdivision micropas | Fonctionnent généralement en pas complet uniquement | Aimants ferrite ou néodyme-fer-bore | Aimants néodyme-fer-bore |
| Matériau du rotor | Tôle d'acier au silicium (pas d'aimants permanents) | Pas complet, demi-pas, micro-pas | Pas complet, demi-pas, micro-pas |
| Surface du rotor | Structure multi-dents sur la surface extérieure du rotor | Lisse et sans dents | Structure multi-dents sur la surface extérieure du rotor |
| Couple magnétique | Génère uniquement un couple attractif | Couple à la fois attractif et répulsif pendant le fonctionnement | Couple à la fois attractif et répulsif pendant le fonctionnement |
3. Types de câblage
Une autre classification des moteurs pas à pas est basée sur le type d'enroulement du moteur biphasé. Les moteurs pas à pas sont classés en moteurs unipolaires et bipolaires en fonction de cette classification.
La principale différence est que les moteurs unipolaires fonctionnent avec une polarité de courant (tension), tandis que les moteurs bipolaires fonctionnent avec deux polarités, ce qui signifie que la direction du flux de courant dans les bobines est variable. Une autre différence est que les bobines du moteur doivent être connectées afin de transférer la puissance de la fin d'une bobine au début de l'autre. Cette méthode de connexion permet d'utiliser une polarité de courant (tension). Un moteur bipolaire a un couple plus élevé qu'un moteur unipolaire, mais il est aussi plus compliqué à contrôler.
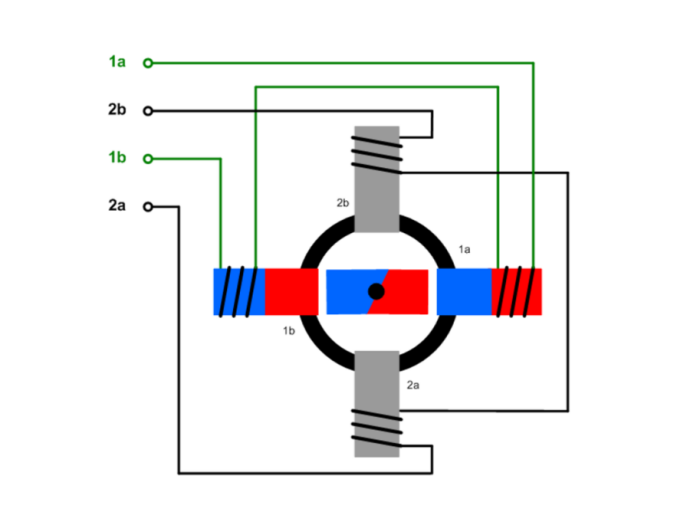
Moteur pas à pas bipolaire et la connexion de ses enroulements
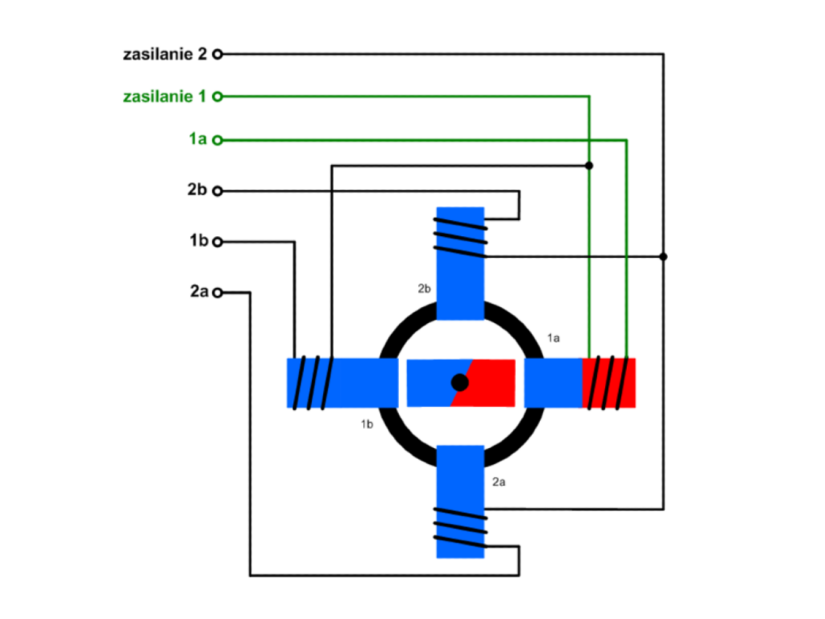
Moteur pas à pas unipolaire et la connexion de ses enroulements
| Moteur pas à pas bipolaire |
Moteur pas à pas unipolaire |
| Couple plus élevé | Couple inférieur |
| Ancrage plus élevé grâce aux enroulements | Ancrage inférieur |
| Plus petit | Plus grande |
| Moins cher | Plus cher |
| Contrôle plus compliqué, qui nécessite une carte comprenant des étages de contrôle de puissance et de balayage | Contrôle plus facile en ne nécessitant qu'un seul circuit d'alimentation à compléter |
4. Avantages des moteurs pas à pas
- Positionnement -En raison des moteurs pas à pas se déplaçant selon des étapes reproductibles précises, ils fonctionnent bien dans les applications qui nécessitent un positionnement précis.
- Contrôle de vitesse- Des incréments de mouvement précis offrent un excellent contrôle de la vitesse.
- Couple à basse vitesse - Les moteurs pas à pas ont un couple élevé à basse vitesse.
5. Inconvénients des moteurs pas à pas
- Faible efficacité - Comparés aux moteurs à courant continu, ils consomment plus de courant. Par conséquent, ils ont tendance à chauffer.
- Limited high speed torque - Le couple du moteur chute rapidement lorsque la vitesse diminue
- Pas de retour d'information - Les commentaires ne sont pas utilisés pour spécifier les éventuelles étapes manquées
- Niveaux élevés de vibrations et de bruit - A des vitesses très élevées, le fonctionnement de ce moteur n'est pas aisé.
- Possible perte de synchronisation -Causés par des facteurs tels que des changements inattendus de charge
- Petit couple vers le rapport d'inertie
- Nécessite un circuit d'entraînement
6. A quoi servent les moteurs pas à pas ?
En tant que tels, les moteurs pas à pas sont un bon choix pour les applications nécessitant une faible vitesse et une grande précision. Certaines de ces applications quotidiennes sont répertoriées ci-dessous :
Moteurs pas à pas pour imprimantes 3D
Les moteurs pas à pas sont presque toujours inclus dans les imprimantes 3D courantes. L'utilisation de moteurs pas à pas dans les imprimantes 3D permet un mouvement et un positionnement très précis sans avoir besoin d'encodeurs et d'autres logiciels ou capteurs supplémentaires de manière rentable. Les moteurs pas à pas peuvent se déplacer à un intervalle connu, puis maintenir cette position.Ils constituent un moteur bien adapté pour déplacer des objets vers des positions répétables.
Selon le type d'imprimante, ils sont utilisés dans une variété d'applications différentes. Par exemple, des moteurs pas à pas sont utilisés pour déplacer l'extrudeuse ou construire les axes X, Y et Z de la plate-forme individuellement. L'assemblage de l'extrudeuse dispose également d'un moteur pas à pas qui est utilisé pour tirer le filament dans l'extrudeuse et contrôler la livraison d'un matériau constant et uniforme à la machine tout au long du processus d'impression.
Les moteurs pas à pas sont disponibles dans une variété de tailles. les tailles les plus couramment utilisées dans les imprimantes 3D sont NEMA 14, NEMA 17, NEMA 23 et NEMA 24.
 Moteurs pas à pas pour CNC
Moteurs pas à pas pour CNC
Les moteurs pas à pas sont une alternative aux servomoteurs et peuvent alimenter la plupart des types de machines CNC. Les moteurs pas à pas ont un faible encombrement et une conception simple, ce qui les rend idéaux pour les petites applications telles que les fraiseuses CNC. Les moteurs pas à pas coûtent moins cher que les servomoteurs pour la même puissance, mais les versions modernes des moteurs pas à pas ont souvent les mêmes caractéristiques.Les moteurs pas à pas sont plus faciles à comprendre et à utiliser en raison de l'absence d'encodeurs, et les moteurs pas à pas sont également sans balais et faciles à entretenir.
Les moteurs pas à pas peuvent généralement fournir des vitesses d'alimentation de 50 à 1 000 pouces par minute, tandis que les servomoteurs peuvent atteindre plus de 2 500 pouces par minute. Si vous avez besoin d'une très grande précision et de vitesses de production élevées, les servomoteurs sont un meilleur choix.
Pour les applications qui ne nécessitent pas une ultra-haute précision. La plupart des fraiseuses CNC qui coûtent moins de 25 000 $ utilisent des moteurs pas à pas plutôt que des servomoteurs. Les moteurs pas à pas en boucle fermée méritent également d'être pris en compte, ils sont bons pour prévenir les erreurs dues aux étapes manquées et peuvent être un bon choix lorsque vous avez besoin d'une solution économique pour les pièces coûteuses.
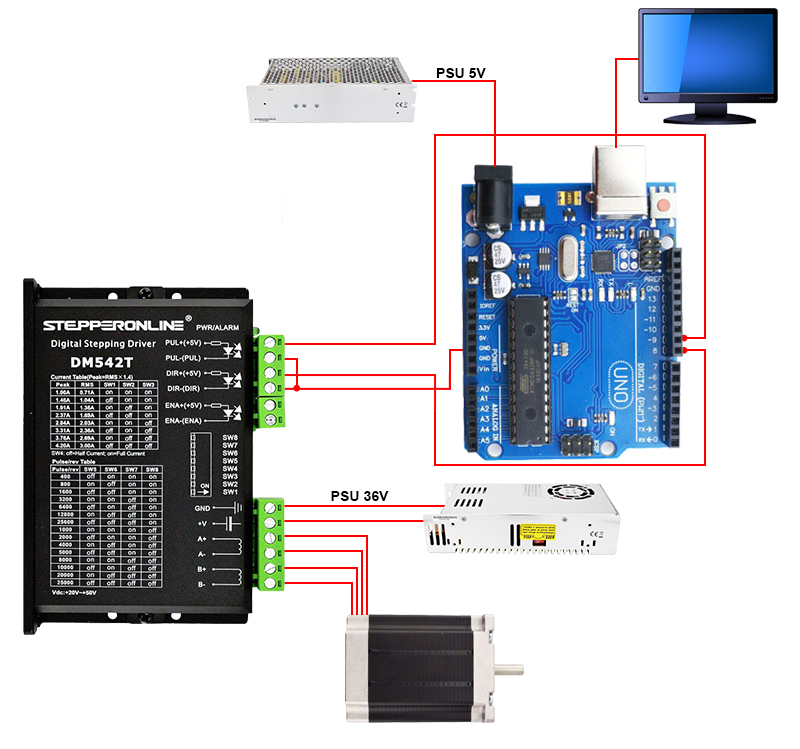
Moteurs pas à pas pour Raspberry Pi, Arduino, MicroPython (par exemple pyboard, Wipy, ESP32, ESP8266 et MicroBit)
Les moteurs pas à pas sont un périphérique extrêmement courant utilisé pour être ajouté à des ordinateurs à carte unique tels que le Raspberry Pi, l'arduino, etc., pour que les amateurs apprennent eux-mêmes les compétences de base en programmation informatique. Il est souvent considéré comme la prochaine étape logique après avoir appris à manipuler et à contrôler de petits moteurs pas à pas peu coûteux pour apprendre à contrôler les cycles d'activation/désactivation des LED et d'autres interrupteurs simples ou types de buzzer.
Il existe de nombreux types de moteurs pas à pas disponibles sur STEPPERONLINE pour de telles applications, à commencer par des versions 5V extrêmement peu coûteuses qui se connectent facilement aux connecteurs de la carte mère du Raspberry Pi.
Moteurs pas à pas pour la robotique
Les moteurs pas à pas peuvent être utilisés pour le contrôle du mouvement, agissant comme des actionneurs qui activent les articulations du robot et peuvent accélérer la charge utile à la vitesse souhaitée.
Moteurs pas à pas pour caméras
Les moteurs pas à pas ont de nombreuses applications dans la vidéographie par caméra et sont couramment utilisés pour la mise au point automatique et le zoom des caméras. Étant donné que le moteur pas à pas offre une capacité de conduite fluide et de haute précision, il lui permet de minimiser les erreurs dans le processus de détection et d'apporter une mise au point précise et fluide lorsqu'il est combiné avec la dernière technologie de visualisation en direct.
Moteurs pas à pas pour l'amélioration de l'habitat
Les moteurs pas à pas ont également de nombreuses applications dans l'automatisation de la maison. Il existe des utilisations courantes des moteurs pas à pas pour faire fonctionner les stores de climatisation, ouvrir ou fermer les vannes des tuyaux et entraîner les stores motorisés.