リード 10.16mm(0.4\") センサー付き")
 リード 5.08mm(0.2\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 8mm(0.314961\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 2.54mm(0.1\")センサー付き")
 リード 4mm(0.15748\") センサー付き")
 リード 2mm(0.07874\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 10.16mm(0.4\") センサー付き")
 リード 5.08mm(0.2\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 23 ステッピング モーター & ドライバー")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 34 ステッピング モーター & ドライバー")
 Nema 23 ステッピング モーター & ドライバー")
 Nema 34 ステッパー モーター & ドライバー")
 Nema 34 ステッピング モーター & ドライバー")
Nema34ステッピングモーターとドライバーおよび60V電源")















ステッピングモーターは、電気エネルギーを機械的動力に変換する電気機械装置です。 同時に、ステッピングモーターはブラシレスの同期モーターであり、完全な回転を膨大な数のステップに分割できます。 ステッピングモーターに電気コマンドパルスが適切な順序で適用されると、ステッピングモーターのシャフトまたはスピンドルが個別のステップで回転し、モーターがアプリケーションに適したサイズである限り、フィードバックメカニズムなしでモーターの位置を正確に制御できます。 。
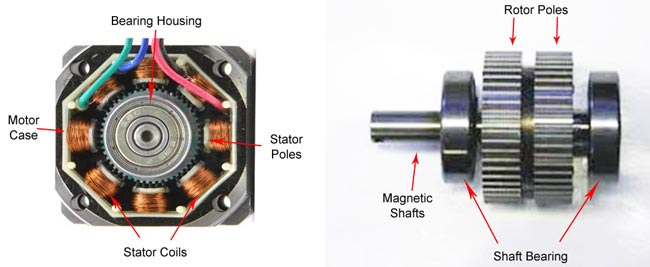
1.ステッピングモーターの構造
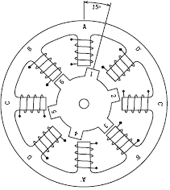
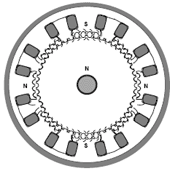
ステッピングモーターは通常、フロントエンドキャップとリアエンドキャップ、ベアリング、センターシャフト、ローターコア、ステーターコア、ステーターアセンブリ、波形ワッシャー、ネジ、およびその他の部品で構成されます。 ステッピングモーターの2つの主要な部分は、固定子と回転子です。 それらは両方とも、それぞれ6つと4つの磁極を持つ磁性材料で構成されています。 固定子の6つの磁極には制御巻線があり、2つの反対の極が相を形成します。
2.ステッピングモーターの種類
ステッピングモーターには、3つの基本的なタイプがあります。リアクティブローター:可変リラクタンスステッピングモーター(VR)、アクティブローター:永久磁石ステッピングモーター(PM)、VRとPMの組み合わせ:ハイブリッドステッピングモーター(HY)
可変リラクタンスステッピングモーター
可変リラクタンスステッピングモーターは、最も単純なタイプのステッピングであり、軟鉄製の多歯ローターと巻線型ステーターで構成されています。 固定子巻線に直流電流を流すと、両極が磁化されます。
回転子の歯が通電された固定子の極に引き付けられると、回転が発生します。 可変リラクタンスステッピングモーターの磁石は、永久磁石ステッピングモーターの磁石よりも小型で軽量であるため、高速です。 可変抵抗ステッピングモーターのローターギアとステーターギアの間の面積が小さいほど、磁力の損失は小さくなります。
このタイプのステッピングモーターは、構造がシンプルで制御しやすいものの、分解能が低く、トルクが小さいです。
永久磁石ステッピングモーター
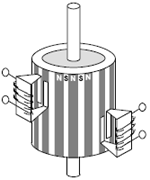
永久磁石は永久磁石ステッピングのモーター構造に組み込まれています。 回転子の位置の変化は、コイルの電流方向の変化、磁極の変化によって引き起こされます。 電流の方向が適切に変更されると、ローターは90°回転します。モーターのこの単一ステップは、一部のアプリケーションでは有用ですが、非常に大きく、不正確になります。 したがって、実際に存在する永久磁石モーターには、より多くの回転子極といくつかの磁石が回転子に取り付けられており、ステップ数と位置決め精度が向上しています。
磁化されたローターポールは、より大きな磁束強度を提供し、その結果、永久磁気モーターは、可変リラクタンスステッピングモーターよりも優れたトルク特性を示します。 シンプルな構造により、かなり低解像度の手頃な価格のモーターが得られます。
ハイブリッドステッピングモーター
ハイブリッドステッピングモーターは、業界で最も広く使用されているタイプのステッピングモーターの1つです。 ハイブリッドステッピングモーターは、可変リラクタンスと永久磁石ステッピングモーターの最高の機能を組み合わせているため、より高価です。 ハイブリッドステッピングモーターは、ステップ分解能、トルク、速度の点で優れたパフォーマンスを提供します。
ハイブリッドステッピングモーターのローターは永久磁石で構成されていますが、上記のモデルとは異なり、磁石は放射状に取り付けられておらず、軸方向に磁化されています。 通常、ローターはモーターシャフトに配置された2つの対向する磁化リングで構成されています。 各リングにスロット溝があり、ローターの歯を形成します。
1回転あたりのフルステップ数は、次の式から計算できます。
- SPR = NR x Ø
- Where: SPR = 1回転あたりのステップ数
- NR = ローター歯の総数(両方のヨークの総数)
- Ø = モーターフェーズの数
- or: NR = SPR/Ø
| 比較 | 可変リラクタンスステッピングモーター(VR) | 永久磁石ステッピングモーター(PM) | ハイブリッドステッピングモーター(HB) |
| 料金 | 中くらい | 比較的安い | 比較的高価 |
| 設計構造 | 簡単 | 中くらい | 比較的複雑 |
| 解像度 | ステップ角:1.8°、0.9°以下 | ステップ角:3°〜30° | ステップ角:1.8°、0.9°以下 |
| トルク速度曲線 | 高速で大きなトルク低下はありません | 低速で大きなトルク、高速で大幅なトルク低下 | 低速で大きなトルク、高速で大幅なトルク低下 |
| ノイズ | より多くのノイズ | ノイズが少ない | より多くのノイズ(マイクロステップの細分化でより良い) |
| 発熱 | 高温上昇(ヒートシンクが必要) | 低温上昇 | 低温上昇 |
| マイクロステップの細分化 | 通常、フルステップでのみ動作します | フェライトまたはネオジム-鉄-ホウ素磁石 | ネオジム-鉄-ホウ素磁石 |
| ローター素材 | ケイ素鋼板(永久磁石なし) | フルステップ、ハーフステップ、マイクロステップ | フルステップ、ハーフステップ、マイクロステップ |
| ローター表面 | ローター外面の多歯構造 | 滑らかで歯がない | ローター外面の多歯構造 |
| 磁気トルク | 魅力的なトルクのみを生成します | 動作中の引力トルクと反発トルクの両方 | 動作中の引力トルクと反発トルクの両方 |
3.配線の種類
ステッピングモーターの別の分類は、2相モーターの巻線のタイプに基づいています。 ステッピングモーターは、この分類に基づいてユニポーラモーターとバイポーラモーターに分類されます。
主な違いは、ユニポーラモーターは1つの電流(電圧)極性で動作するのに対し、バイポーラモーターは2つの極性で動作することです。つまり、コイルを流れる電流の方向は可変です。 さらなる違いは、一方のコイルの端からもう一方のコイルの始めに電力を転送するために、モーターコイルを接続する必要があることです。 この接続方法では、1つの極性の電流(電圧)を使用できます。 バイポーラモーターはユニポーラモーターよりもトルクが高くなりますが、制御が複雑になります。
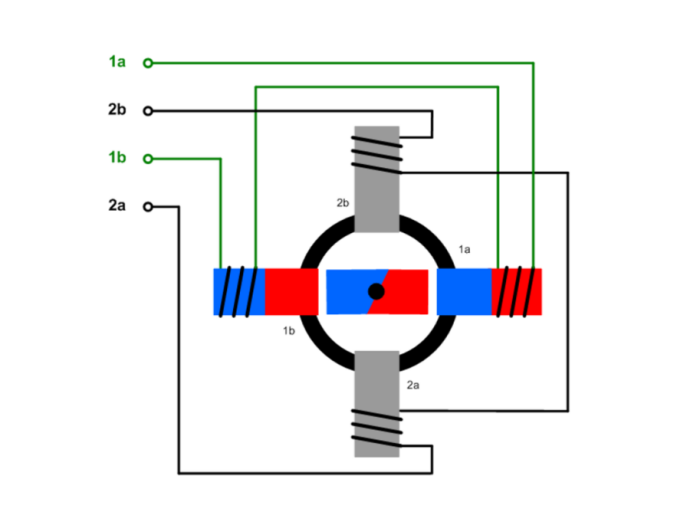
バイポーラステッピングモーターとその巻線の接続
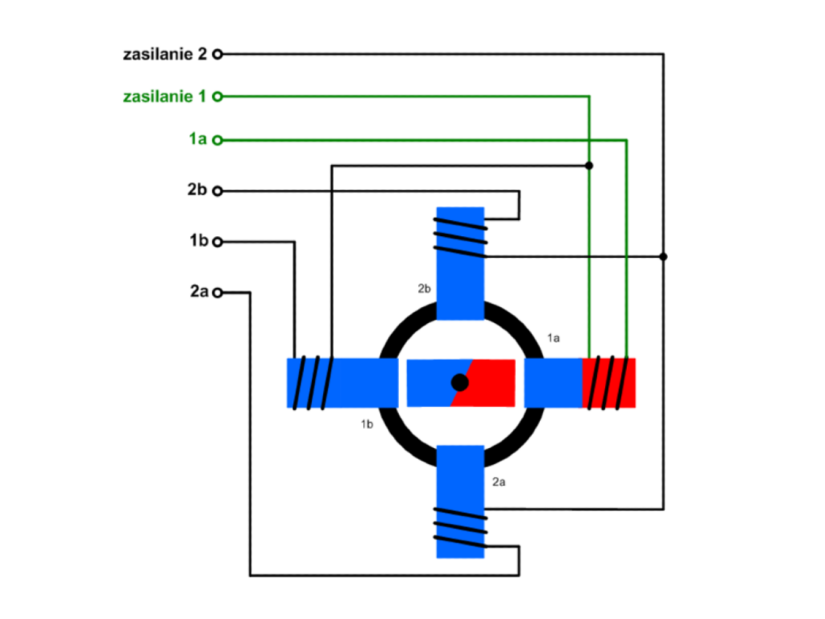
ユニポーラステッピングモーターとその巻線の接続
| バイポーラステッピングモーター | ユニポーラステッピングモーター |
| より高いトルク | より低いトルク |
| 巻線によるより高い定着 | 下の停泊地 |
| 小さい | 大きい |
| 安い | もっと高い |
| より複雑な制御。これには、電源およびスルー制御ステージを含むボードが必要です。 | 電源回路を1つだけ完成させることで制御が容易 |
4.ステッピングモーターの利点
- ポジショニング - ステッピングモーターは正確な繰り返し可能なステップで移動するため、正確な位置決めが必要なアプリケーションで良好に機能します。
- 速度制御 - 正確なモーション増分により、速度の優れた制御が可能になります。
- 低速トルク - ステッピングモーターは低速で高トルクになります.
5. ステッピングモーターのデメリット
- 低効率 - DCモーターと比較して、より多くの電流を使用するため、高温になる傾向があります。
- 制限された高速トルク - 速度が低下すると、モーターのトルクは急速に低下します
- フィードバックはありません - フィードバックは、見逃される可能性のあるステップを指定するためには使用されません
- 高レベルの振動と騒音- 非常に高速では、このモーターの操作は簡単ではありません。
- 同期が失われる可能性 - 負荷の予期しない変化などの要因によって引き起こされます
- 慣性比に向けた小さなトルク
- 駆動回路が必要
6. ステッピングモーターは何に使われていますか?
そのため、ステッピングモーターは、低速と高精度を必要とするアプリケーションに適しています。これらの日常的なアプリケーションの一部を以下に示します。
3Dプリンター用ステッピングモーター
ステッピングモーターは、ほとんどの場合、一般的な3Dプリンターに含まれています.3Dプリンターでステッピングモーターを使用すると、エンコーダーやその他の追加のソフトウェアやセンサーを必要とせずに、費用対効果の高い方法で非常に正確なモーションと位置決めが可能になります。間隔を空けてその位置を保持します。オブジェクトを繰り返し可能な位置に移動するのに適したモーターです。
プリンターの種類に応じて、さまざまな用途で使用されます。たとえば、ステッピングモーターを使用して、押出機を移動したり、プラットフォームのX、Y、Z軸を個別に構築したりします。また、押出機アセンブリには、使用されるステッピングモーターがあります。フィラメントを押出機に引き込み、印刷プロセス全体を通して、一貫性のある均一な材料の機械への供給を制御します。
ステッピングモーターにはさまざまなサイズがあります。3Dプリンターで使用される最も一般的なサイズは、NEMA 14、NEMA 17、NEMA 23、およびNEMA24です。
 CNC用ステッピングモーター
CNC用ステッピングモーター
ステッピングモーターはサーボモーターの代替品であり、ほとんどのタイプのCNC機械に電力を供給できます。ステッピングモーターは設置面積が小さく、設計がシンプルなため、CNCフライス盤などの小さなアプリケーションに最適です。ステッピングモーターは、サーボモーターよりもコストが低くなります。パワーがありますが、ステッピングモーターの最新バージョンは同じ機能を備えていることがよくあります。ステッピングモーターはエンコーダーがないため、理解と操作が簡単で、ステッピングモーターもブラシレスでメンテナンスが簡単です。
ステッピングモーターは通常、毎分50〜1,000インチの送り速度を提供できますが、サーボモーターは毎分2,500インチを超えることがあります。非常に高い精度と高い生産速度が必要な場合は、サーボモーターの方が適しています。
超高精度を必要としない用途向け。25,000ドル未満のほとんどのCNCフライス盤は、サーボモーターではなくステッピングモーターを使用します。閉ループステッピングモーターも検討する価値があり、ステップの失敗によるエラーの防止に優れています。高価なワークピースに対して予算にやさしいソリューションが必要な場合に適しています。
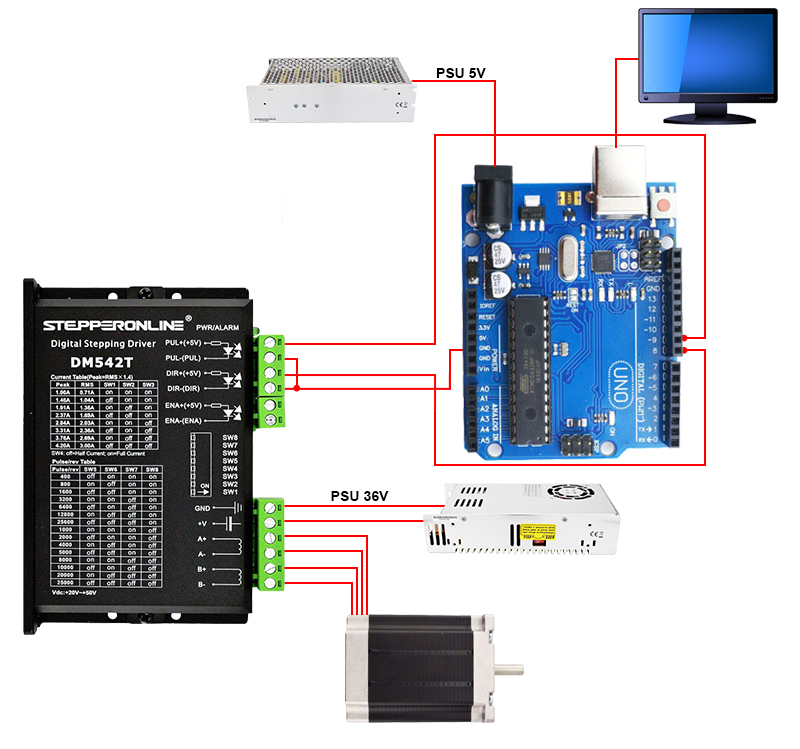
Raspberry Pi、Arduino、MicroPython用のステッピングモーター(例:pyboard、Wipy、ESP32、ESP8266、MicroBit)
ステッピングモーターは、Raspberry Piやarduinoなどのシングルボードコンピューターに追加して、愛好家が基本的なコンピュータープログラミングスキルを習得するために使用される非常に一般的な周辺機器です。これは、操作と制御を学んだ後の論理的な次のステップと見なされることがよくあります。 LEDのオン/オフサイクルやその他の単純なスイッチやブザータイプの制御を学ぶための小型で安価なステッピングモーター。
このようなアプリケーション用にSTEPPERONLINEで利用できるステッピングモーターには多くの種類があり、RaspberryPiのマザーボード上のコネクタに簡単に接続できる非常に安価な5Vバージョンから始まります。
ロボット工学用ステッピングモーター
ステッピングモーターはモーションコントロールに使用でき、ロボットの関節を作動させてペイロードを希望の速度に加速するアクチュエータとして機能します。
カメラ用ステッピングモーター
ステッピングモーターは、カメラのビデオ撮影に多くの用途があり、カメラのオートフォーカスやズームに一般的に使用されています。ステッピングモーターは、スムーズで高精度の運転能力を提供するため、検出プロセスのエラーを最小限に抑え、組み合わせたときに正確でスムーズなフォーカスを実現します。最新のライブビューテクノロジーを搭載しています。
住宅改修用ステッピングモーター
ステッピングモーターは、家庭の自動化にも多くの用途があります。ステッピングモーターは、エアコンのブラインドを操作したり、パイプバルブを開閉したり、電動ウィンドウシェードを駆動したりするための一般的な用途があります。