







































































 リード 10.16mm(0.4\") センサー付き")
 リード 5.08mm(0.2\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 8mm(0.314961\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 2.54mm(0.1\")センサー付き")
 リード 4mm(0.15748\") センサー付き")
 リード 2mm(0.07874\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 10.16mm(0.4\") センサー付き")
 リード 5.08mm(0.2\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 23 ステッピング モーター & ドライバー")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 34 ステッピング モーター & ドライバー")
 Nema 23 ステッピング モーター & ドライバー")
 Nema 34 ステッパー モーター & ドライバー")
 Nema 34 ステッピング モーター & ドライバー")
Nema34ステッピングモーターとドライバーおよび60V電源")














ステッピングモーターについてすべてがわかる記事
興味のある章を直接クリックしてください。
● ステッピングモーターとは何ですか?
ステッピング モーターは、デジタル パルスを機械軸の回転に変換するブラシレス同期 DC モーターです。他の多くの標準タイプのモーターとは異なり、ステッピング モーターは、供給される DC 電圧が遮断されるまで、任意の回転数で回転し続けることはありません。これには、グループ、いわゆる「フェーズ」に編成されたいくつかのコイルがあります。各相のスイッチを順番にオンにすると、モーターが段階的に回転します。
ステッピング モーターは、回転運動全体をいくつかの等しいステップに分割します。モーターがアプリケーションのトルクと速度に対して適切なサイズである限り、モーターの位置はこれらのステップのいずれかで移動し、位置センサーからのフィードバックなしでそこに留まるように制御できます。
さらに、ステッピング モーターはデジタル入出力デバイスです。これは、制御信号がアナログ電圧の形式ではなくデジタル パルスの形式であるアプリケーションに特に適しています。ステッピング モーター ドライバーにデジタル パルスが送信されると、モーターの動きの特定の角度が増加します。デジタル パルスの周波数が増加すると、ステップ動作が連続回転になります。
コンピュータ制御のステッピングを使用すると、非常に正確な位置決めや速度制御を実現できます。その結果、ステッピング モーターは、多くの高精度モーション コントロール アプリケーションに最適なモーターとなっています。
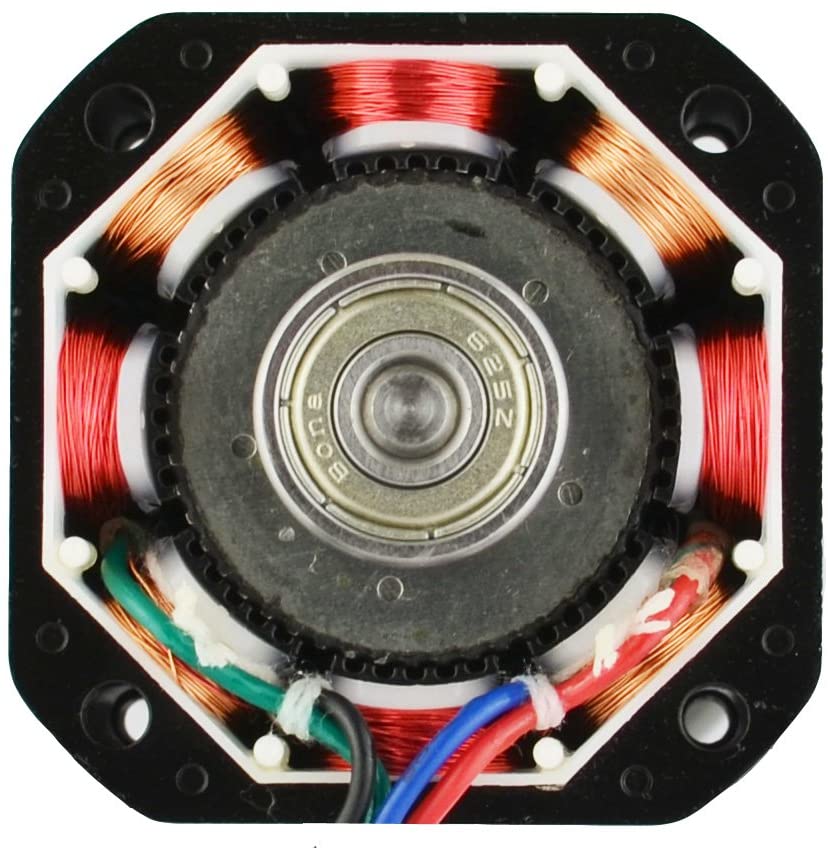
● ステッピング モーターはどのように動作しますか?
電流が固定子巻線を流れると、固定子巻線はベクトル磁界を生成します。この磁界は、ローターを特定の角度で回転させ、ローターの磁界の方向がステーターの磁界の方向と一致するようにします。固定子のベクトル磁場がある角度で回転するとき。ローターもこの磁場に対してある角度で回転します。電気パルスが入力されるたびにモーターは角度を回転し、1 ステップ前進します。出力角変位は入力パルス数に比例し、回転速度はパルス周波数に比例します。巻線に通電する順序を変更すると、モーターの方向が逆になります。したがって、ステッピング モーターの回転は、モーターの各相巻線のパルス数、周波数、通電順序を制御することで制御できます。
一般的なタイプのモーターには、内部に鉄心と巻線コイルが含まれています。巻線には抵抗があり、通電すると損失が発生します。損失の大きさは抵抗と電流の二乗に比例します。これは私たちがよく銅損と呼ぶものです。電流が標準の DC 波または正弦波ではない場合、高調波損失も発生します。鉄心にはヒステリシスがあります。渦電流効果は交流磁場でも損失を生じますが、その大きさは材料、電流、周波数、電圧に関係します。これを鉄損といいます。
銅損と鉄損は両方とも熱の形で現れ、モーターの効率に影響を与えます。ステッピングモーターは一般に位置決め精度とトルク出力を追求するため、効率が比較的低くなります。一般に電流は大きくなり、高調波成分が多くなります。回転速度が変化すると交流の周波数も変化します。したがって、ステッピング モーターが通常よりも熱くなるのが一般的です。
モーターは電気エネルギーを機械エネルギーに変換し、ステッピング モーターは電気パルス信号を角変位または線形変位に変換する開ループ制御要素です。非過負荷状態では、モーターの速度と停止位置はパルス信号の周波数とパルス数のみに依存し、負荷の変化には影響されません。つまり、モーターにパルス信号を加えると、モーターはステップ角だけ回転します。この線形関係の存在は、周期的な誤差のみがあり、累積誤差がないというステッピング モーターの特性と結びついています。これにより、ステッピング モーターを使用して速度、位置、その他の制御領域を制御することが非常に簡単になります。
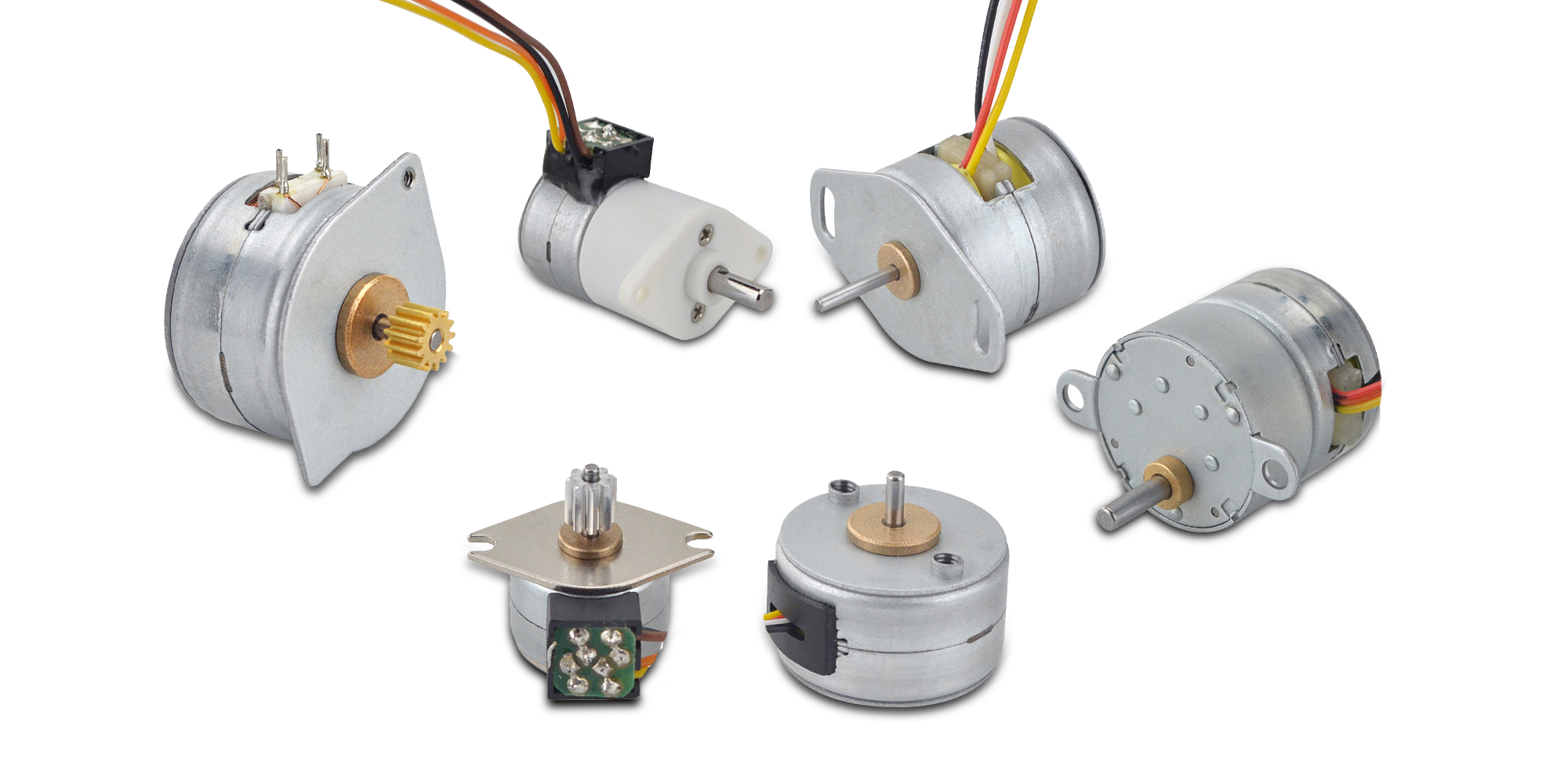
● ステッピング モーターのサイズ
ステッピング モーターは、「Nema 17」や「Nema 23」など、フレーム サイズによって分類されます。これがどのようにして起こるのか、あるいはそれが何を意味するのか考えたことはありますか?米国電気製造者協会は、ステッピング モーターを含む多くの電気製品の規格を定めています。一般的に「Nema 17」とは、モーターの取り付け面が 1.7 インチ四方であることを意味します。したがって、Nema 23 ステッピング モーターの寸法は 2.3 インチ四方です。または、以下に示すように 57mm。
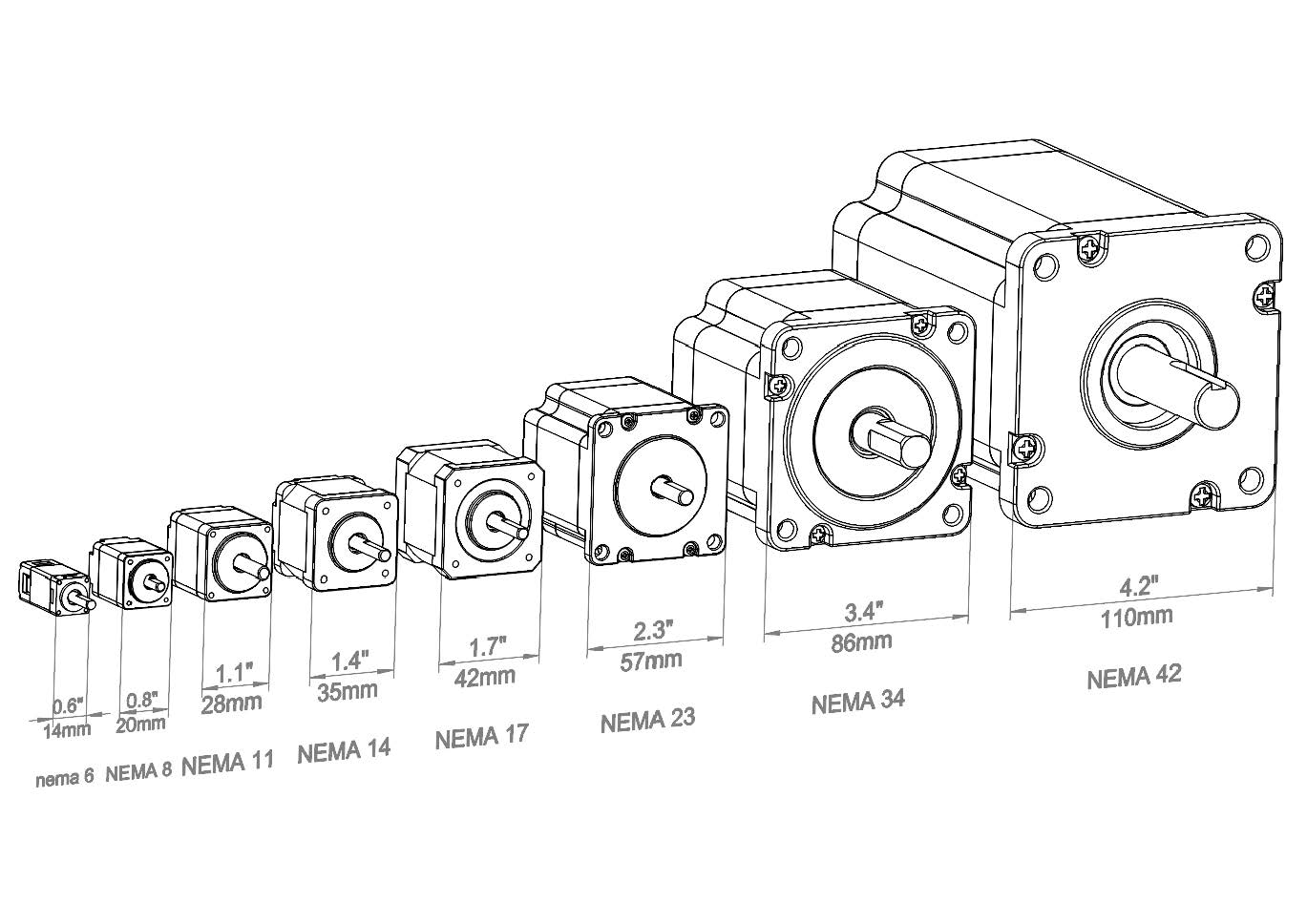
下の写真には、Nema サイズ 06、08、11、14、17、23、24、34、および 42 ステッピング モーターが含まれています。サイズ 24 は少し特殊です。サイズ 24 には Nema の公式定義がありません。サイズ 23 と同様に取り付けられますが、わずかに幅が広く (約 4 mm)、より大きなローターとステーターの使用が可能になるため、約 30%トルクが増加します。

基本的に、メーカーは提案された規格に同意します。これにより、メーカーは、何も再設計することなく、1 つの Nema 17 モーターが別の Nema 17 マウントに適合することが事前にわかっているため、設計の柔軟性が向上します。特にモーターのサプライヤーを変更する場合はそうです。
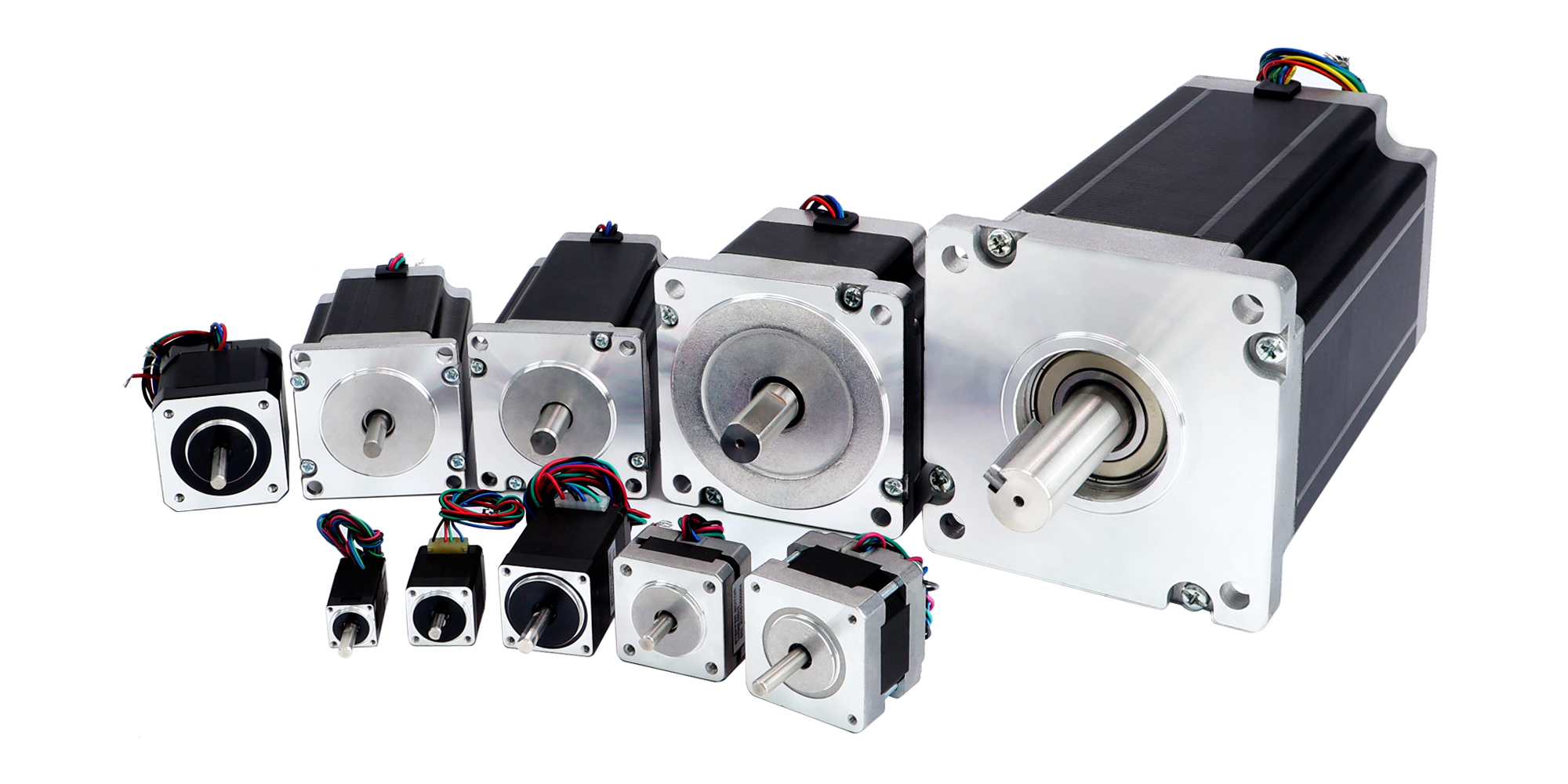
● ステッピング モーターの種類
STEPPERONLINE で販売されているステッピング モーターにはさまざまな種類があり、さまざまな種類のステッピング モーターの特性と用途を理解することは、どのタイプが最適かを判断するのに役立ちます。
ハイブリッド ステッピング モーターは、可変リラクタンス モーターと永久磁石モーターを組み合わせたものです。ステーターは可変リラクタンス ステッピング モーターと同様に電磁的に刺激され、ステッピング モーターのローターは永久磁石ステッピング モーターと同様に軸方向に磁化されます。このステッピング モーターは、電気パルスを角変位に変換するアクチュエーターです。
他の 2 種類のステッピング モーターと比較して、ハイブリッド ステッピング モーターは、より小さなステップ角でより高いトルクを提供し、より優れた動的特性を備えています。科学技術の発展、特に永久磁石材料、半導体技術、コンピューター技術の発展に伴い、これらのステッピングモーターは産業オートメーション、ロボット工学、繊維産業、医療産業で広く使用されています。
閉ループ ステッピング モーターは、閉ループ制御を実現するためにモーターの端にエンコーダーが追加されたステッピング モーターです。ステッピング モーターの閉ループ制御は、位置フィードバックや速度フィードバックを使用してローター位置に適切な位相変化を決定するサーボ システムです。これにより、ステップを失うことなくステッピング モーターの性能を大幅に向上させることができます。
クローズドループステッピングモーターは二重巻線構造を採用しており、モーターには高精度リニアエンコーダーが使用されています。モーターが 1 フレーム回転するたびにエンコーダーからパルスが出力されるため、モーターの正確な回転位置を知ることができますが、通常のステッピング モーターは 1 つしかありません。巻き線の位置やモーターの回転位置は信頼できません。

クローズドループステッピングモーターはラッチ制御を採用しており、基準パルスの入力が必要です。フィードバック制御により制御パルスを同期させることができます。通常のステッピングモーターはオープンループ制御を採用しており、基準パルスの入力が不要であるのに対し、モーターの回転位置を一定に保つことができます。制御する必要があるのはモーターのステップ周波数と方向だけであり、モーターの回転位置は制御できません。
通常のステッピング モーターと比較して、閉ループ ステッピング モーターは動的応答能力が高く、小さな位置誤差で正確な回転位置制御を実現できます。また、一般的なステッピングモーターの位置精度は 1 度以内しか制御できず、動作の安定性が悪く、位置誤差が大きいのに対し、位置精度は 0.1 度以内で制御できる高精度です。
さらに、閉ループ ステッピング モーターは負荷容量が高く、より大きな負荷に耐えることができますが、通常のステッピング モーターは負荷容量が低く、耐久性も劣ります。
一体型ステッピング モーターは、ステッピング ドライブとモーターを 1 つのユニットに組み合わせています。一体型ステッピング モーターは省スペース設計を実現し、モーターとドライブ コンポーネントを個別に分離した場合と比較して配線を削減し、コストを節約します。これらは、包装やラベル貼り、自動テストと測定、自動組み立て、ライフ サイエンスなどのアプリケーションに最適です。
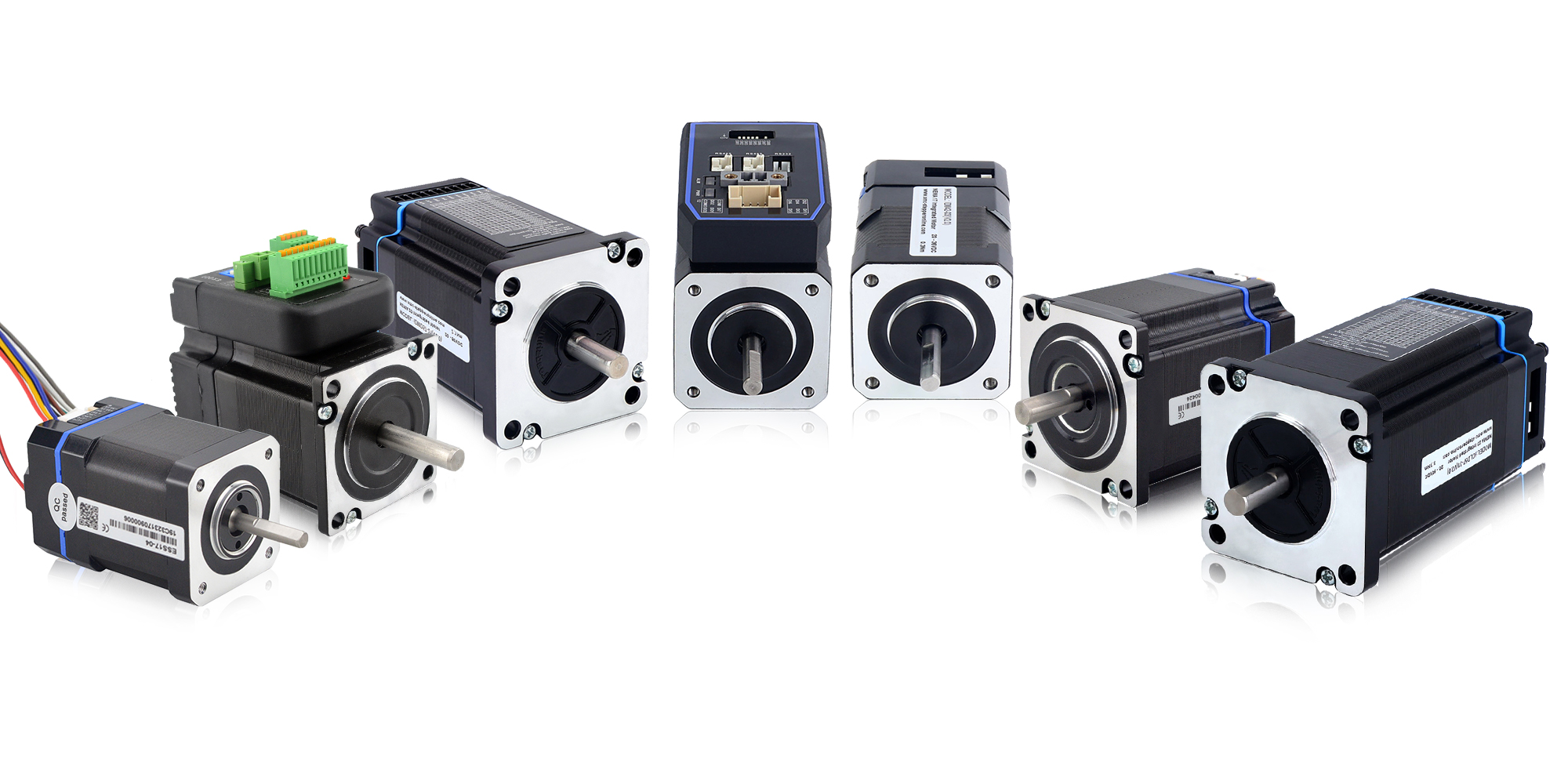
モーターとドライブ ユニットを統合することのその他の利点には、実装の容易さ、配線の複雑さの軽減、システムのセットアップと設計の迅速化、モーターとドライブの互換性の保証などがあります。
永久磁石モーターはローター内に永久磁石 (PM) を使用し、ローターの磁石とステーターの電磁石の間の引力または反発力で動作します。永久磁石ステッピングモーターのローターは永久磁石鋼で作られています。ステッピングモーターのステーターはプレス法により爪状歯極に加工されており、ローターにはラジアル多極着磁の永久磁石磁性鋼を採用しています。コイル電流の方向によって発生する磁界はローターの磁界と相互に排他的であるため、モーターは逆回転します。
このステッピング モーターは pm ステッピング モーターとしても知られており、モーター全体のステーターとローターの軸方向が 2 つのセクションに分割され、中央は磁気分離片によって分離されています。 2 つのセクションはステップ角で相互に分離されており、それぞれステータ、ロータ、およびステータにスリーブを付けられたリング巻線で構成されています。 PM ステッピング モーターは、主にコンピューター周辺機器、写真システム、光電子結合デバイス、バルブ制御、原子炉、銀行端末、CNC 工作機械、自動巻線機、電子時計、医療機器などに使用されます。
可変リラクタンス ステッピング モーターは、磁気抵抗の原理で動作する電気モーターの一種です。このモーターは、鉄製のローターといくつかのステーター巻線で構成されています。巻線は特定の順序で磁化され、ローターが個別のステップで動きます。
可変リラクタンス ステッピング モーターは、低速で高いステップ レートと優れたトルクを提供します。ただし、高速では共振の問題によりパフォーマンスが満足のいくものではない可能性があります。
可変リラクタンス ステッピング モーターは頑丈で信頼性が高いと考えられているため、モーターが過酷な条件にさらされる可能性がある環境に適しています。
可変リラクタンス ステッピング モーターの主な欠点の 1 つは、他のタイプのステッピング モーターよりもノイズが大きくなる傾向があることです。これは、ローターの減衰が不十分なため、より高いレベルの機械振動が発生するためです。
リニア ステッピング モーターは、設計と動作原理が従来の回転ステッピング モーターとは異なる特殊なタイプのステッピング モーターです。リニア ステッピング モーターは、従来のステッピング モーターで実現される回転運動ではなく、直線運動を通じて線形変位を実現するリニア モーターです。 リニアステッピングモーターの構造は通常、固定ステーターと可動スライダーで構成されます。ステーターにはコイルが内蔵されており、スライダーには永久磁石が内蔵されています。ステータコイルに電流が流れると磁界が発生します。スライダ上の永久磁石とステータの磁界との間の相互作用により引力または反発力が発生し、それによってスライダが固定軸上で直線運動します。リニア ステッピング モーターの制御は、従来のステッピング モーターと似ています。電流の方向と大きさを制御することで、スライダの位置と速度を制御できます。各ステッピング モーターのパルス信号によりスライダーが一定のステップで移動するため、正確な直線変位が実現されます。

リニア ステッピング モーターには、外部ドライブ、スルーシャフト、固定シャフトの 3 つの一般的なタイプがあります。特定のアプリケーションの主要な指標に応じて選択できます。リニア ステッピング モーターには、高精度、ゼロ バックラッシュ トランスミッション、高速応答という利点があるため、高性能のリニア モーション制御が必要なアプリケーションで好まれています。
● 単極性と双極性
ステッピング モーターは、電気パルスによって回転角度を制御するモーターです。バイポーラ ステッピング モーターとユニポーラ ステッピング モーターは、2 つの一般的なタイプのステッピング モーターです。それらの主な違いは制御方法です。 バイポーラ ステッピング モーターはローターの方向を変えるために電流を逆にする必要があるため、方向を制御するには 4 つの電極が必要で、各電極には 2 つの状態 (オン/オフ) があります。
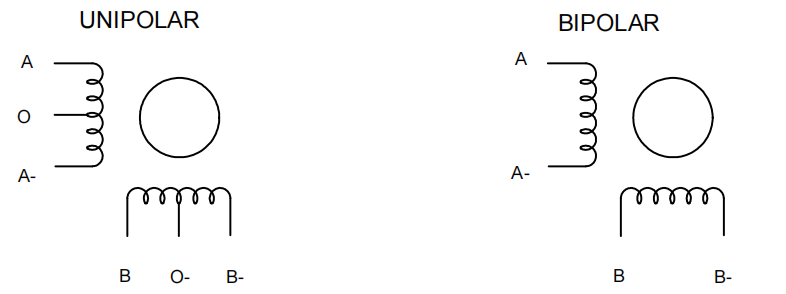
ユニポーラ ステッピング モーターはローターの回転を制御するために 2 つの電極のみを必要とし、モーターは電流の方向を変えることで回転します。したがって、バイポーラ ステッピング モーターと比較して、ユニポーラ ステッピング モーターは同じモーション制御を実現するために 2 つの電極のみを必要とします。ただし、ユニポーラ ステッピング モーターでは制御回路にユニポーラ ドライバーを追加する必要があるため、回路の複雑さは若干高くなります。
バイポーラ ステッピング モーターとユニポーラ ステッピング モーターにはそれぞれ長所と短所があり、特定のアプリケーション シナリオに応じて適切なモーターを選択できます。
バイポーラ ステッピング モーターは、トルクが大きく、速度が速く、高精度で制御が簡単であるという利点があるため、高速かつ高精度の制御が必要な場面でよく使用されます。ユニポーラ ステッピング モーターのトルクと精度をバイポーラ ステッピング モーターのトルクと精度と比較します。モーターの調子も悪くなり、速度も遅くなります。さらに、ユニポーラ ステッピング モーターで使用されるドライバーは高価であり、選択肢が少なくなります。
● ステッピングモーター、ドライバー、電源の選び方は?
ステッピング モーターは、動きを制御する必要がある場合に適しています。回転角度、速度、位置、同期の制御が必要なシナリオで使用できます。
したがって、ステッピング モーターを選択するときは、考慮する必要がある要素がいくつかあります。
1.モーターは負荷にどのように接続されていますか?
モーターと負荷の間のカップリングのタイプを決定したら、シャフトの長さ、直径、シャフトの種類に基づいてステッピング モーターを選択できます。現在、STEPPERONLINEの標準ステッピングモーターは、さまざまなシャフト長、シャフト径、シャフトタイプを取り揃えており、モーターシャフトに関するさまざまなカスタマイズサービスを提供できます。2.負荷はどれくらいの速さで移動または加速する必要がありますか?
適切なモーターを選択するときは、速度と負荷のバランスを考慮する必要があります。高速動作が要求される一部の機器では高速モーターを選択できますが、負荷が大きい場合はトルクの大きいモーターを選択する必要があります。したがって、モータを選定する際には実際のニーズに合わせて速度と負荷のバランスを考慮し、移動速度と負荷の両方を満足できるモータを選定する必要があります。 以下は、無負荷状態における各サイズのモーターの最高速度と推奨速度です。
| 無負荷速度 | |||
| モーターの種類 | 寸法(mm) | 最大速度(rpm) | 推奨作業速度(rpm) |
| 開ループ モーター | Nema 6(14x14) | 1000 | 100-600 |
| Nema 8(20x20) | 1000 | 100-600 | |
| Nema 11(28x28) | 1000 | 100-600 | |
| Nema 14(35x35) | 1000 | 100-600 | |
| Nema 16(40x40) | 1000 | 100-500 | |
| Nema 17(42x42) | 1000 | 100-500 | |
| Nema 23(57x57) | 1000 | 100-500 | |
| Nema 24(60x60) | 1000 | 100-500 | |
| Nema 34(86x86) | 1000 | 100-400 | |
| Nema 42(110x110) | 500 | 100-300 | |
| 閉ループモーター | Nema 8(20x20) | 2000 | 100-1500 |
| Nema 11(28x28) | 2000 | 100-1500 | |
| Nema 14(35x35) | 2000 | 100-1000 | |
| Nema 17(42x42) | 2000 | 100-1000 | |
| Nema 23(57x57) | 1500 | 100-1000 | |
| Nema 24(60x60) | 1500 | 100-1000 | |
| Nema 34(86x86) | 1500 | 100-1000 | |
モーター曲線図に基づいて、モーターが負荷速度要件を満たしているかどうかを判断することもできます。
3.負荷を移動するにはどれくらいのトルクが必要ですか?
ほとんどのモーターにはトルク定格があります。これは、モーターに必要な動作を行うための強度があるかどうかを判断するために確認する必要があるものです。ステッピング モーターの保持トルクは、従来のモーターの「出力」に似ています。ただし、ステッピング モーターの物理的構造は AC モーターや DC モーターとはまったく異なり、モーターの出力は速度、電流、入力電圧によって異なります。
一般に、必要なトルクが 0.8N.m 未満の場合は、Nema 8 (20x20mm)、Nema 11 (28x28mm)、Nema 14 (35x35mm)、Nema 16 (39x39mm)、Nema 17 (42x42mm) を選択します。トルクが約 1N.m の場合は、Nema 23 ステッピング モーターを選択してください。トルクが数 N.m を超える場合は、Nema 34 や Nema 42 などの仕様のステッピング モーターを選択する必要があります。
4.荷重の位置決めにはどの程度の精度が必要ですか?
ステッピング モーターの精度は、ステップが小さいほど向上します。これは、1 つの回転がより注意深く、より多くのステップに分割され、エラーの余地が少なくなるからです。たとえば、角度 0.9° のステッピング モーターは、角度 1.8° のステッピング モーターよりも高い精度を実現します。
よくある誤解は、ハーフステップで動作する 1.8° モーターはフルステップで動作する 0.9° ステッピング モーターと同じ精度を達成できるということです。もう 1 つの誤解は、0.9° ステッピング モーターを使用するとトルクが失われるということです。これらの仮定は正しくありません。機械設計の特徴を理解すれば、その理由を説明できます。
一般に、0.9° ステッピング モーターは高速および高精度のアプリケーションに最適です。逆に、1.8°ステッピング モーターはトルクは高くなりますが、精度は低くなります。特許取得済みの 12 極設計の 0.9° ステッピング モーターも利用できます。これらのより高度なモーターは、0.9° モーターと 1.8° モーターの機能を組み合わせており、高精度と高トルクを提供します。
ステッピング モーターを最大限に活用するには、適切なドライバーを使用する必要があります。ドライバーを選択するときは、電圧、電流、マイクロステッピング、位相数という 3 つの重要な要素に留意する必要があります。それぞれがモーターの性能において重要な役割を果たします。これらのパラメータを考慮しないと、パフォーマンスの低下、騒音の増大、さらにはモーターの過熱や故障が発生し、生産時間の損失やメンテナンス コストの増加につながる可能性があります。
1.定格電圧
モーターの最大定格電圧を超えたり、より高い供給電圧で動作させたりすると、モーターが誤動作する可能性があります。このため、ステッピング モーター ドライバーを選択する際には、製品説明またはトルク カーブからモーターの最大定格電圧または代表定格電圧を把握する必要があります。ステッピング モーターは通常、AC (120V または 240V) または低電圧 DC (24V、36V、または 48V など) で動作するドライバーによって電力を供給されます。 DC 24V 定格のモーターなど、指定よりも高い電圧でモーターを動作させると、モーターがすぐに過熱します。逆に、低すぎる電圧で動作するモーター (例: 24VDC で動作する高電圧モーター) は、生成する電力が少なくなり、負荷が軽減されないとモーターが停止する可能性があります。
2.現在の評価
アプリケーションに適したさまざまな電圧でシステムをテストできるように、ドライバーが広い電流範囲に適していることを確認してください。電流定格については、連続電流または実効電流とピーク電流要件の両方を考慮する必要があります。ブラシ付きおよびブラシレス DC モーターでは、起動時および停止中に逆起電力は存在せず、ドライバーはモーターの巻線抵抗のみを確認します。したがって、モーターが回転し、電源電圧とは逆の逆起電力を生成する前に電流サージが発生し、消費電流が減少します。アプリケーションが通常動作中に最大 1A の連続電流しか必要としない場合でも、起動時や停止時には 2 ~ 3 倍、またはそれ以上の連続電流を処理する必要がある場合があります。
3.マイクロステッピング
ステッピング モーターは、通常 1.8°、つまり 1 回転あたり 200 ステップのステップで動きます。小さな動きが必要な場合、これは問題になる可能性があります。 1 つのオプションは、ある種のギアボックスを使用することですが、別のオプションとしてマイクロステッピングがあります。マイクロステッピングとは、1 回転あたり 200 を超えるステップを実行できるため、より小さな動きを実現できることを意味します。
ステッピング モーターをフル ステップで動作させる場合、ステッピング モーター ドライバーの出力は方形波信号のように見え、粗い動きを生成します。マイクロステップが大きいほど、出力信号は正弦波のように見え、ステッピング モーターはよりスムーズに動きます。ただし、これには欠点もあります。マイクロステップ値が大きくなるにつれてトルクは急激に低下し、値が大きすぎるとモーターが回転するのに十分なトルクを発生できなくなります。通常、1/4、1/8、さらには 1/16 を使用すると、満足のいくスムーズな動きを実現しながら、十分なトルクを生成できます。
4.フェーズの数
ステッピング モーター ドライバーは、特定の数の位相を制御するために使用されます。一般的なユニポーラおよびバイポーラ ステッピング モーターでは 2 相駆動が使用されますが、可変リラクタンス モーターでは 3 相駆動が使用されます。ドライバーを選択する前に、モーターの相数をご確認ください。
ステッピング モーターを使用する場合は、ステッピング モーターに電力を供給する電源が必要です。適切な電源を使用すると、ステッピング モーターが最適なパフォーマンスで動作します。逆に、間違った電源を使用すると、パフォーマンスが低下したり、エネルギーの無駄が大きくなる可能性があります。
以下は、電源を選択するためのヒントです。
| モーターのサイズ | 駆動電圧 |
| Nema 8 - Nema 17 | 12 - 24VDC |
| Nema 23, Nema 24 | 24 - 48VDC |
| Nema 34 | 48 - 100VDC/30 - 70VAC |
| Nema 42 - Nema 52 | 110 - 220VAC |
- Confirm motor’s rated current. You can find it at motor datasheet.
- Confirm driving voltage. Driving voltage is main factor when choosing a power supply. Normally, higher voltage will have better performance.
Below table are the recommend voltage for stepper motors, you can choose a driving a right voltage as per your application.
Calculate the power value. We provide a simple formula for you:
P=n*I*V*1.2P:パワー値
n:ステッピングモーターの数
I:モーター定格電流
V:駆動電圧
1.2: マージンの 20% を意味します
例:それぞれ定格電流 3A のモーター 3 ユニット、駆動電圧は 36V、推定電力は約: 3*3A*36V*1.2=388.8W です。したがって、36V 400W の電源サプライヤーを選択できます
ご注意ください: この式は単なる電力の推定値であり、作業条件が異なれば必要な電力も異なります。たとえば、3 軸システムでは、3 つのモーターすべてが同時に動作しているわけではなく、3 つのモーターすべてが最大負荷で動作しているわけでもありません。この条件では、電力値は式で計算された値よりも低くなる可能性があります。
● ステッピングモーターの長所と短所
ステッピング モーターの利点
- ステッピング モーターは、その内部構造により、モーターの位置を検出するためのセンサーを必要としません。モーターは「ステップ」で移動するため、これらのステップをカウントするだけで、特定の時点でのモーターの位置を決定できます。
- ステッピング モーターは制御も非常に簡単です。モーターにはドライバーが必要ですが、正しく機能するために複雑な計算や設定は必要ありません。一般に、他のモーターに比べて制御に必要な仕事量が少なくなります。マイクロステッピング方式を使用すると、最大約 0.007° の高い位置決め精度を達成できます。
- ステッピング モーターは、低速で大きなトルクを提供し、位置の保持に優れ、長寿命です。 >
- ステッピング モーターのローターの質量が大きく、慣性が高くなります。高速動作時には振動や騒音が発生しやすく、動作の安定性や精度に影響を与えます。これはステッピング モーターの大きな欠点であり、この影響を緩和または排除するための対策を講じる必要があります。
- ステッピング モーターの動作原理は、短期間の瞬間パルス制御によって位置と速度を制御することです。長期間使用すると、モーターが容易に加熱したり、焼損する可能性があります。長期間の連続動作が必要なアプリケーションの場合、ステッピング モーターは最適な選択ではない可能性があります。
● ステッピングモーターの用途と応用
ステッピング モーターの特性により、ステッピング モーターは、単純な位置制御と位置を維持する機能を必要とする次のような多くのアプリケーションで使用されます。
1. 3D プリンター
ステッピング モーターは 3D プリンターの重要なコンポーネントの 1 つです。プリンターの種類に応じて、さまざまな用途に使用できます。たとえば、ステッピング モーターは、x、y、z 軸に沿って押出機や構築プラットフォームを個別に移動させるために使用されます。通常、押出機アセンブリには、フィラメントを押出機内に引き込むステッピング モーターが装備されています。
ステッピング モーターは、既知の間隔で移動し、その位置に留まるという点で独特です。オブジェクトを繰り返し固定位置に移動できるため、ロボットやプリンターでよく使用されます。
ステッピング モーターにはさまざまなサイズがあります。 3D プリンタで最も一般的に使用されるサイズは、NEMA 14、NEMA 17、NEMA 23、および NEMA 24 です。
2. CNC マシン
ステッピング モーターはサーボ モーターの代替選択肢であり、ほとんどのタイプの CNC 機械に電力を供給できます。 CNC アプリケーションには、事前にプログラムされたコンピュータ ソフトウェアが工場や製造環境における工作機械の動作と物理的な動きを制御する幅広い製造プロセスが含まれます。CNC アプリケーションのステッピング モーターは、サーボ モーターのより「経済的な」代替品とみなされますが、これは時代遅れの技術知識に基づいた過度の単純化であり、今日では必ずしも厳密に正確であるとは限りません。ステッピング モーターは、同じ出力であればサーボ モーターよりも安価である傾向がありますが、最新バージョンも同様に多用途です。その結果、ステッピング モーターの用途はさらに広がり、工作機械からデスクトップ コンピューター、自動車に至るまで、より幅広い機械やシステムに使用されるようになりました。
CNC ステッピング モーターには、エンコーダーが必要ないという点で、サーボ モーターに比べて重要な利点があります。サーボ モーターは本質的に、ステッピング モーターに比べて理解と操作がより困難です。その理由の 1 つは、信頼性の高いサーボ モーターの他の多くのコンポーネントよりも故障しやすいエンコーダーがサーボ モーターに含まれているためです。ステッピング モーターにはエンコーダーが必要ないため、理論的にはサーボ モーターよりも信頼性が高くなります。
さらに、ステッピング モーターは (サーボ モーターとは異なり) ブラシレスでもあるため、ベアリングが良好な動作状態にある限り、定期的な交換の必要はありません。
3.カメラのレンズ
ステッピング モーターは、ハイエンド カメラ テクノロジーのさまざまなアプリケーションで広く使用されています。これらは、レンズ内の自動焦点や絞り設定など、非常に正確な内部構造を制御するために使用できます。さらに、ステッピング モーターは、セキュリティ カメラや遠隔監視システムのハウジングや外部の機械構造にも応用されています。
特に、ステッピング モーターと電動カメラ スライダーを併用すると、カメラ位置決めデバイスの非常にスムーズな動作が可能になります。これは、安全装置によって捕捉されたレンズを確実に保持できることを意味し、視野の周りでのカメラの物理的な動きによって引き起こされる潜在的な画像歪みの問題を回避します。 ステッピング モーターは、静止時の最大トルク、すべての動作入力に対する非常に正確で瞬時の応答時間、事前にプログラムされた動作の一貫した再現性、固定ステップ サイズに基づくシンプルな開ループ制御など、カメラおよびビデオ監視位置決めシステムにいくつかの魅力的な機能を提供します。 .
上記に加えて、ステッピング モーターはセキュリティ、サービス ロボット、プリンター、スキャナー、繊維機械、包装機械、CD ドライブ、インテリジェント照明などにも使用されています。