







































































 リード 10.16mm(0.4\") センサー付き")
 リード 5.08mm(0.2\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 8mm(0.314961\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 2.54mm(0.1\")センサー付き")
 リード 4mm(0.15748\") センサー付き")
 リード 2mm(0.07874\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 10.16mm(0.4\") センサー付き")
 リード 5.08mm(0.2\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 23 ステッピング モーター & ドライバー")
 Nema 34 ステッピングモーター & ドライバー & 60V 電源")
 Nema 34 ステッピング モーター & ドライバー")
 Nema 23 ステッピング モーター & ドライバー")
 Nema 34 ステッパー モーター & ドライバー")
 Nema 34 ステッピング モーター & ドライバー")
Nema34ステッピングモーターとドライバーおよび60V電源")















アプリケーションに適したステッピングモーターを選択するには、次のパラメーターを考慮する必要があります。
保持トルク
保持トルクとは、巻線に定格電流が流れ、モーターが回転していないときのトルクです。 通常、ステッピングモーターはおおよそのサイズでお選びいただけます。 一般に、トルクが0.8N.m未満の場合は、ネマサイズがNema 8-Nema 17のステッピングモーターを選択でき、トルクが約1〜3N.mの場合は、Nema23ステッピングモーターが適しています。 トルクが3N.mを超える場合は、Nema 34、Nema42を選択してください。
運転方法
ステッピングモーターの性能は、さまざまな運転モードによって大きく影響を受けるため、運転方法も考慮する必要があります。 駆動方法には通常、定電圧および定電流駆動、ユニポーラおよびバイポーラ駆動が含まれます。 ユニポーラおよびバイポーラ駆動回路と比較して、ユニポーラ駆動回路は4本のパワーチューブを使用し、コイル電流はコイル内を一方向に流れます。 バイポーラ駆動回路には、ユニポーラの2倍の8本のパワーチューブが必要です。また、コイルには順方向と逆方向の電流が交互に流れ、交互に導通します。 ただし、短時間で同時に導通すると電源が短絡し、大電流が発生します。 そのため、短絡防止回路を追加する必要があります。 バイポーラ駆動回路はユニポーラよりも複雑です。 一般的に、低速および高トルク負荷にはバイポーラ駆動が使用され、高速駆動にはユニポーラ駆動が適しています。
駆動電圧
駆動電圧は、機械の使用環境に関係するドライバーの入力電圧です。 それは12V、24V、48Vなど、またはAC 24V、36V、50V、60V、110V、220Vなどです。ステッピングモーターの性能に対する電圧選択の影響は次のとおりです。電圧が高い場合、性能 ステッピングモーターの性能が優れており、特にモーターの高速性能が優れています。
駆動電流
駆動電流は、ステッピングモーターの単相巻線の両端の電流です。 駆動電流は、ステッピングモーターがこの電流の下でのみ動作できることを意味するのではなく、駆動電流よりも大きい場合もあれば、駆動電流よりも小さい場合もあります。
トルク周波数特性
トルク周波数特性は、ステッピングモーターのトルクと周波数の間にプロットされた曲線です。 これは、ステッピングモーターの最も重要な動的曲線であるだけでなく、ステッピングモーターを選択するための基本的な基礎でもあります。 ステッピングモーターの動的トルクは、ステッピングモーターが動作しているときの平均電流に依存します。平均電流が大きいほど、ステッピングモーターの出力トルクが大きくなります。 ステッピングモーターの出力トルクは速度に反比例します。つまり、低速ではステッピングモーターの出力トルクが大きく、高速では出力トルクが小さくなります。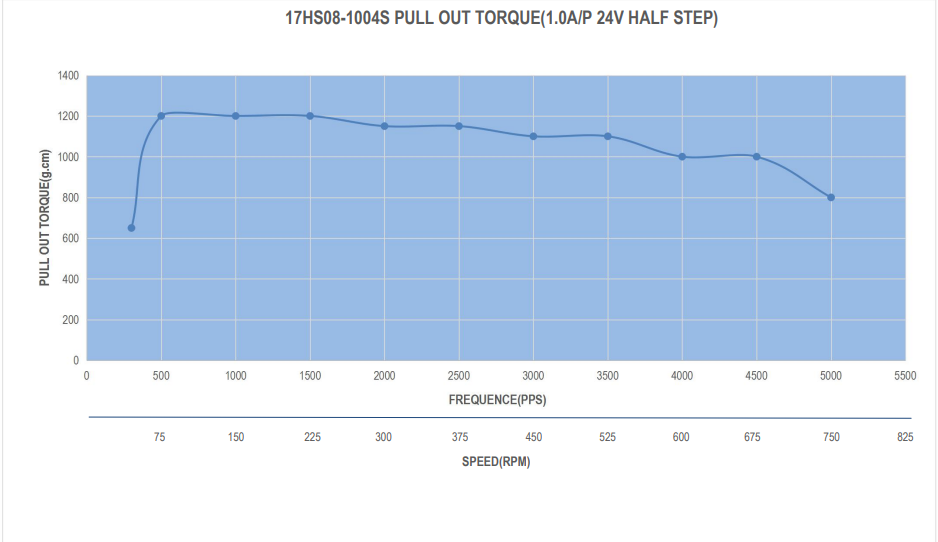
段階
位相とは、ステッピングモーターのコイルグループの数を指します。たとえば、2相ステッピングモーターには2グループのコイルがあり、3相ステッピングモーターには3グループのコイルがあります。 異なる位相のステッピングモーターは、異なる動作効果を持っています。 2相ステッピングモーターは0.9および1.81.8度のステップ角を提供でき、3相モーターは1.2度のステップ角を提供できます。 ほとんどの場合、2相ステッピングモーターがより頻繁に使用されます。 ただし、高速・高トルクの作業環境では、3相ステッピングモーターを選択する方が実用的です。