Leitung 10,16mm(0,4\") mit Sensor")
 Leitung 5,08mm(0,2\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 8mm(0,314961\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 2.54mm(0.1\") mit Sensor")
 Leitung 4mm(0,15748\") mit Sensor")
 Leitung 2mm(0,07874\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 10,16mm(0,4\") mit Sensor")
 Leitung 5,08mm(0,2\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
 Nema 23 Schrittmotor und Treiber")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
 Nema 34 Schrittmotor und Treiber")
 Nema 23 Schrittmotor und Treiber")
 Nema 34 Schrittmotor und Treiber")
 Nema 34 Schrittmotor und Treiber")
 Nema 34 Schrittmotore & Schrittmotortreiber & 60V Netzteil")















Um den richtigen Schrittmotor für Ihre Anwendung auszuwählen, müssen die folgenden Parameter berücksichtigt werden:
Haltemoment
Das Haltemoment ist das Drehmoment, das entsteht, wenn der Nennstrom an den Wicklungen anliegt und sich der Motor nicht dreht. Normalerweise können Sie einen Schrittmotor grob nach seiner Größe auswählen. Im Allgemeinen kann bei einem Drehmoment von weniger als 0,8N.m ein Schrittmotor mit einer Nema-Größe von Nema 8-Nema 17 gewählt werden, bei einem Drehmoment von etwa 1~3N.m ist ein Schrittmotor mit Nema 23 besser geeignet. Wenn das Drehmoment mehr als 3N.m beträgt, sollte ein Nema 34 oder Nema 42 gewählt werden.
Antriebsmethode
Die Antriebsmethode sollte ebenfalls berücksichtigt werden, da die Leistung des Schrittmotors durch die verschiedenen Antriebsarten stark beeinflusst wird. Zu den Ansteuerungsmethoden gehören normalerweise Konstantspannungs- und Konstantstromansteuerung, unipolare und bipolare Ansteuerung. Im Vergleich zu unipolaren und bipolaren Ansteuerungsschaltungen werden bei unipolaren Ansteuerungsschaltungen vier Leistungsröhren verwendet, und der Spulenstrom fließt in einer einzigen Richtung in der Spule. Bipolare Treiberschaltungen benötigen acht Leistungsröhren, also doppelt so viele wie unipolare. Außerdem fließen die Vorwärts- und Rückwärtsströme in der Spule abwechselnd in Vorwärts- und Rückwärtsrichtung, und sie leiten abwechselnd. Das gleichzeitige Leiten in kurzer Zeit führt jedoch zu einem Kurzschluss in der Stromversorgung und erzeugt einen starken Strom. Daher muss eine Schaltung zur Verhinderung eines Kurzschlusses hinzugefügt werden. Die bipolare Treiberschaltung ist komplizierter als die unipolare. Im Allgemeinen wird die bipolare Ansteuerung für niedrige Drehzahlen und hohe Drehmomente verwendet, während die unipolare Ansteuerung für hohe Drehzahlen geeignet ist.
Antriebsspannung
Die Ansteuerspannung ist die Eingangsspannung des Treibers, die mit der Einsatzumgebung der Maschine zusammenhängt. Sie kann 12V, 24V, 48V, etc. oder AC 24V, 36V, 50V, 60V, 110V, 220V, etc. sein. Der Einfluss der Spannungswahl auf die Leistung des Schrittmotors ist folgender: Je höher die Spannung, desto besser ist die Leistung des Schrittmotors, insbesondere die Hochgeschwindigkeitsleistung des Motors ist besser.
Antriebsstrom
Der Antriebsstrom ist der Strom an beiden Enden der einphasigen Wicklung des Schrittmotors. Der Antriebsstrom bedeutet nicht, dass der Schrittmotor nur mit diesem Strom arbeiten kann, er kann größer als der Antriebsstrom oder kleiner als der Antriebsstrom sein.
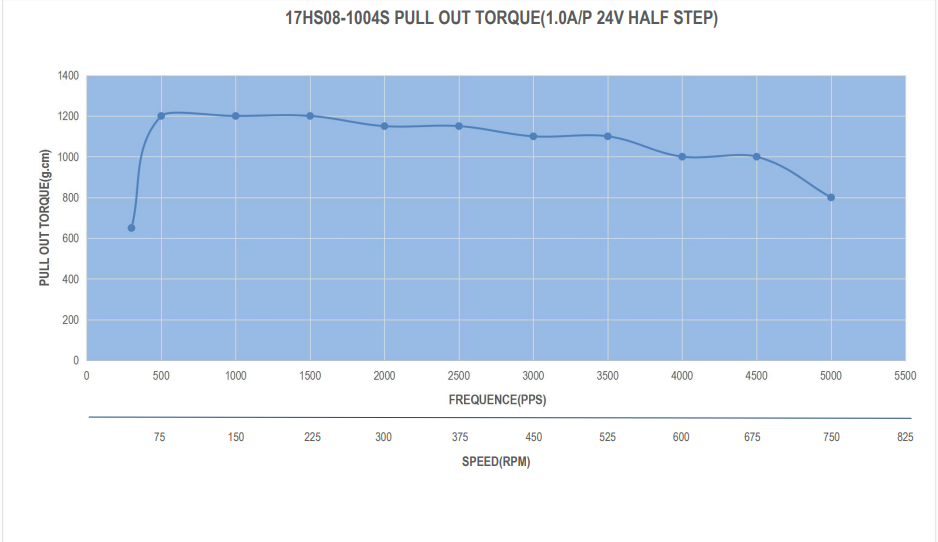
Drehmoment-Frequenz-Charakteristik
Die Drehmoment-Frequenz-Kennlinie ist die Kurve, die zwischen dem Drehmoment und der Frequenz des Schrittmotors aufgezeichnet wird. Sie ist nicht nur die wichtigste dynamische Kennlinie des Schrittmotors, sondern auch die grundlegende Basis für die Auswahl eines Schrittmotors. Das dynamische Drehmoment des Schrittmotors ist abhängig von der durchschnittlichen Stromstärke, wenn der Schrittmotor läuft. Je größer der durchschnittliche Strom ist, desto größer ist das Ausgangsdrehmoment des Schrittmotors. Das Ausgangsdrehmoment des Schrittmotors ist umgekehrt proportional zur Drehzahl, was bedeutet, dass das Ausgangsdrehmoment des Schrittmotors bei niedriger Drehzahl groß und bei hoher Drehzahl klein ist.
Phase
Phase bezieht sich auf die Anzahl der Spulengruppen des Schrittmotors, z. B. hat ein 2-Phasen-Schrittmotor 2 Spulengruppen und ein 3-Phasen-Schrittmotor hat 3 Spulengruppen. Schrittmotoren mit verschiedenen Phasen haben unterschiedliche Arbeitseffekte. Ein 2-Phasen-Schrittmotor kann einen Schrittwinkel von 0,9 und 1,8 Grad bieten, ein 3-Phasen-Motor kann einen Schrittwinkel von 1,2 Grad bieten. In den meisten Fällen werden 2-Phasen-Schrittmotoren häufiger verwendet. In einer Arbeitsumgebung mit hoher Geschwindigkeit und hohem Drehmoment ist es jedoch praktischer, einen 3-Phasen-Schrittmotor zu wählen.