







































































 リード 10.16mm(0.4\") センサー付き")
 リード 5.08mm(0.2\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 8mm(0.314961\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 2.54mm(0.1\")センサー付き")
 リード 4mm(0.15748\") センサー付き")
 リード 2mm(0.07874\") センサー付き")
 リード 12.7mm(0.5\") センサー付き")
 リード 6.35mm(0.25\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")
 リード 10.16mm(0.4\") センサー付き")
 リード 5.08mm(0.2\") センサー付き")
 リード 2.54mm(0.1\") センサー付き")














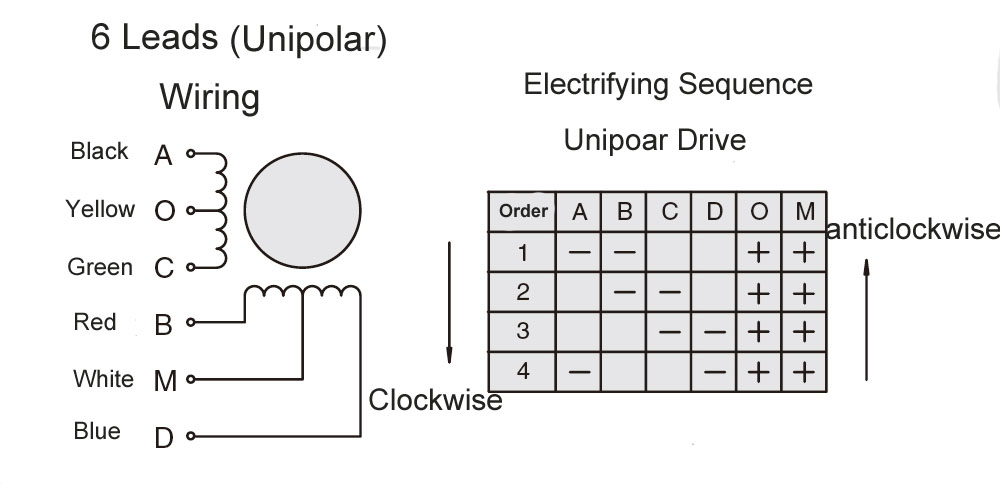
ユニポーラ駆動: モーターのさまざまな巻線が特定のパターンに従って順番に励磁されますが、各巻線の電流の方向は常に同じであり、これをユニポーラ駆動といいます。 p>
ユニポーラ駆動回路は、4 つのトランジスタを使用してステッピング モーターの 2 相を制御します。 モーターの固定子巻線構造は、図 1 に示すように、センタータップ付きの 2 組のコイルで構成されています。モーター全体では 6 本のワイヤが外部に接続されています。 AC側に同時に通電することはできません(BD側も同様)。2つのコイルが磁極で発生する磁束が打ち消し合い、コイルの銅損のみが発生します。 実際には 2 相しかないため (AC 巻線は単相、BD 巻線は単相)、正しい名称は 2 相 6 線式ステッピング モーターです。
バイポーラ ステッピング モーターの駆動回路を図 2 に示します。この回路では 8 個のトランジスタを使用して 2 組の相を駆動します。 ステータの磁極には単一のコイルが巻かれており、コイルAC、BDの電流の向きを変えることで磁極の方向が切り替わります。 ステッピング モーターの初期開発では、ユニポーラ モーターは制御回路内のトランジスタの数が少なくて済むため、半導体コンポーネントのコストが高く、ある程度の応用範囲が得られました。 しかし、1950 年代と 1960 年代の半導体材料の急速な発展により、トランジスタのコストは大幅に下がり、バイポーラ モーターはその性能上の利点から使用量が急増しました。
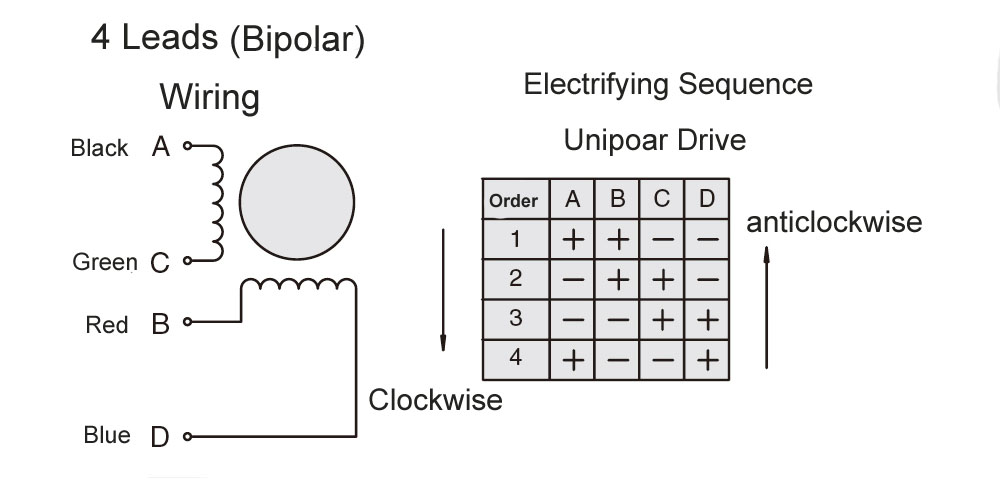
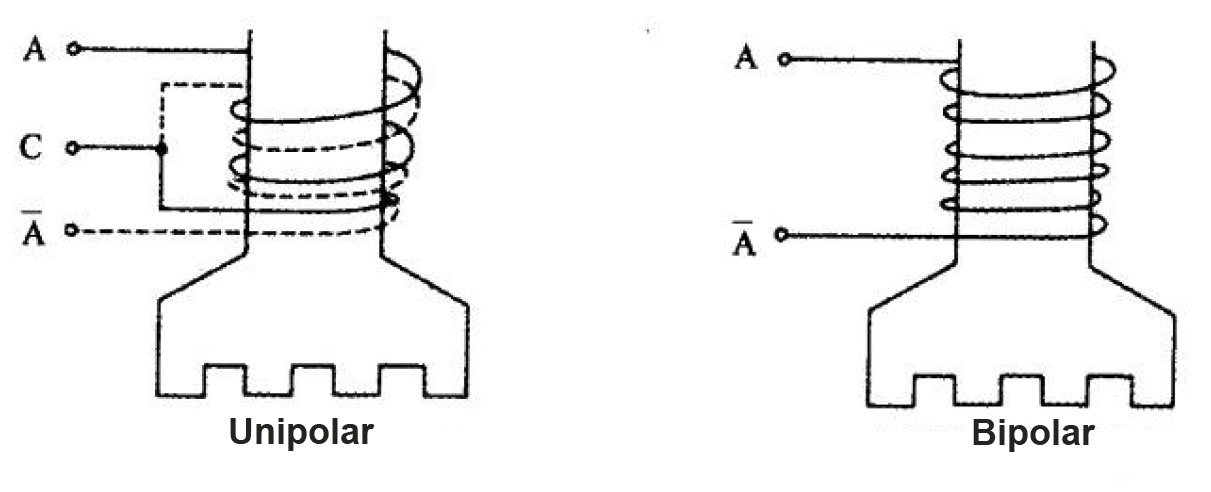
図 3 は、ユニポーラとバイポーラの 2 つの巻線方法を示しています。 線径が同じ場合、ユニポーラ方式のコイル巻数はN、抵抗値はR、バイポーラ方式のコイル巻数は2Nとなります。 、コイル抵抗は 2R です。
次の表は、定電圧駆動回路における低速時のユニポーラ駆動とバイポーラ駆動の効率を比較したものです。 電流とコイル巻数の積はアンペアターンと呼ばれ、トルクに比例します。 2 つの速度が同じ場合、出力電力はアンペアターンに比例します。 同様にバイポーラ電流はV/2R、巻数も2Nとなり、積はユニポーラと同じVN/Rとなります。 入力定電圧駆動の場合、ユニポーラとバイポーラの比較は下表のとおりです。 電流はユニポーラのわずか半分であり、低速での効率はユニポーラの 2 倍です。
したがって、小型または低速のアプリケーションで高トルクが必要な場合は、バイポーラ モーターとドライバーを使用する必要があります。 高速アプリケーションでは、バイポーラ モーターの巻数が増加し、インダクタンスが大きくなり、逆起電力が増加するため、電流が減少し、トルクが減少します。 したがって、ユニポーラ モーターのトルクとの比較には注意が必要です。
| Unipolar | Bipolar | |
| Ampere Tturns | U1=V*N/R | U2=V*2N/2R=V*N/R |
| Input Power | W1=V²/R | W2=(V/2R)²*2R=V²/2R |
| Efficiency | η=U1/W1=N/V | η=U2/W2=2N/V |
注: V は印加電圧です。 R はモーターコイルの抵抗です。 N はユニポーラのターン数です
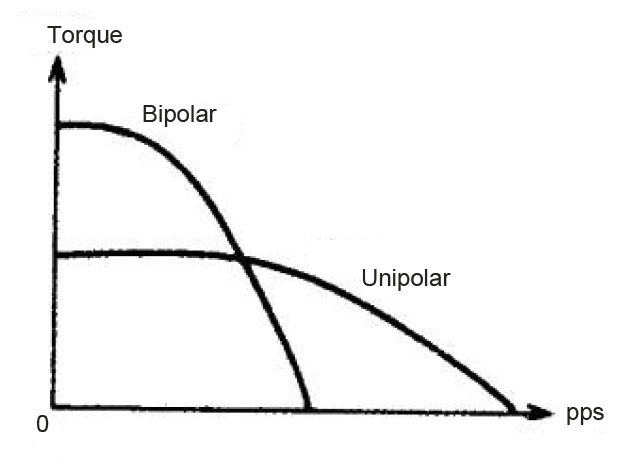
図 4 は、ユニポーラ ステッピング モーターとバイポーラ ステッピング モーターの特性曲線を示しています。どちらも同じ定電流駆動モードを採用しています。 一般に、低速および高トルク負荷のアプリケーションではバイポーラ ドライブが使用され、高速ドライブのアプリケーションではユニポーラ ドライブが使用されます。
 0.3A 42 x 42x34mm 6 ワイヤ")
 0.3A 42x42x34mm 6 ワイヤ")
 0.4A 42x42x39mm 6 ワイヤー")
 0.8A 42x42x40mm 6 ワイヤ")
 0.4A 42x42x48mm 6 ワイヤ")
 3A 57x57x56mm 8 ワイヤー")
 4A 57x57x84mm 8 ワイヤー")
 4A 57x57x84mm 8 ワイヤー")
 60x60x100mm 8 ワイヤー")