Ołów 10,16mm (0,4\") z czujnikiem")
 Ołów 5,08mm (0,2\") z czujnikiem")
 Ołów 2,54mm (0,1\") z czujnikiem")
 Ołów 12,7mm (0,5\") z czujnikiem")
 Ołów 8mm (0,314961\") z czujnikiem")
 Ołów 12,7mm (0,5\") z czujnikiem")
 Ołów 6,35mm (0,25\") z czujnikiem")
 Ołów 6,35mm (0,25\") z czujnikiem")
 Ołów 2,54mm (0,1\") z czujnikiem")
 Ołów 2.54mm(0.1\") z czujnikiem")
 Ołów 4mm (0,15748\") z czujnikiem")
 Ołów 2mm (0,07874\") z czujnikiem")
 Ołów 12,7mm (0,5\") z czujnikiem")
 Ołów 6,35mm (0,25\") z czujnikiem")
 Ołów 2,54mm (0,1\") z czujnikiem")
 Ołów 10,16mm (0,4\") z czujnikiem")
 Ołów 5,08mm (0,2\") z czujnikiem")
 Ołów 2,54mm (0,1\") z czujnikiem")
) Silnik krokowy Nema 34 i sterownik oraz zasilacz 60V")
) Silnik krokowy Nema 34 i sterownik oraz zasilacz 60V")
) Silnik krokowy Nema 34 i sterownik oraz zasilacz 60V")
 Silnik krokowy i sterownik Nema 23")
) Silnik krokowy Nema 34 i sterownik oraz zasilacz 60V")
) Silnik krokowy i sterownik Nema 34")
) Silnik krokowy i sterownik Nema 23")
 Nema 34 Silnik krokowy i sterownik")
) Silnik krokowy i sterownik Nema 34")
 Nema 34 Silnik krokowy i sterownik oraz zasilacz 60V")















W celu doboru odpowiedniego silnika krokowego do aplikacji należy wziąć pod uwagę następujące parametry:
Moment trzymania
Moment trzymający to moment obrotowy, gdy na jego uzwojenia jest przyłożony prąd znamionowy, a silnik się nie obraca. Zwykle można wybrać silnik krokowy z grubsza według jego rozmiaru. Ogólnie rzecz biorąc, gdy moment obrotowy jest mniejszy niż 0,8 Nm, można wybrać silnik krokowy o rozmiarze Nema 8-Nema 17, gdy moment obrotowy wynosi około 1 ~ 3 Nm, bardziej odpowiedni jest silnik krokowy Nema 23. Gdy moment obrotowy jest większy niż 3 Nm, należy wybrać Nema 34, Nema 42.
Metoda jazdy
Należy również wziąć pod uwagę metodę jazdy, ponieważ na wydajność silnika krokowego duży wpływ będą miały różne tryby jazdy. Metody prowadzenia zwykle obejmują sterowanie stałym napięciem i stałym prądem, sterowanie jednobiegunowe i dwubiegunowe. W porównaniu z unipolarnymi i bipolarnymi obwodami sterującymi, unipolarne obwody sterujące wykorzystują cztery lampy mocy, a prąd cewki płynie w cewce w jednym kierunku. Bipolarne obwody sterujące wymagają ośmiu lamp mocy, dwa razy więcej niż jednobiegunowych. Ponadto prądy do przodu i do tyłu naprzemiennie płyną w cewce w kierunku do przodu i do tyłu i naprzemiennie przewodzą. Jednak jednoczesne przewodzenie w krótkim czasie spowoduje zwarcie w zasilaczu i wygeneruje silny prąd. Dlatego konieczne jest dodanie obwodu zabezpieczającego przed zwarciem. Dwubiegunowy obwód sterujący jest bardziej skomplikowany niż jednobiegunowy. Ogólnie rzecz biorąc, napęd bipolarny jest używany do niskich prędkości i wysokiego momentu obrotowego, podczas gdy jazda jednobiegunowa jest odpowiednia do napędu o dużej prędkości.
Napięcie sterujące
Napięcie sterujące to napięcie wejściowe sterownika, które jest związane ze środowiskiem użytkowania maszyny. Może to być 12V, 24V, 48V itd. lub AC 24V, 36V, 50V, 60V, 110V, 220V itd. Wpływ doboru napięcia na osiągi silnika krokowego jest następujący: im wyższe napięcie tym osiągi silnika krokowego jest lepsza, szczególnie wysoka prędkość silnika jest lepsza.
Prąd jazdy
Prąd napędowy to prąd na obu końcach uzwojenia jednofazowego silnika krokowego. Prąd napędowy nie oznacza, że silnik krokowy może pracować tylko pod tym prądem, może być większy niż prąd napędowy lub mniejszy niż prąd napędowy.
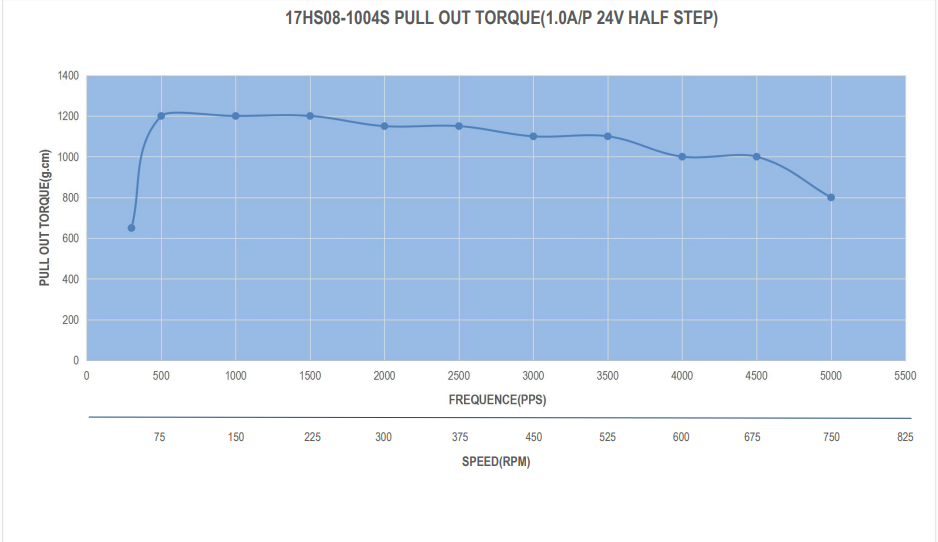
Charakterystyka częstotliwości momentu obrotowego
Charakterystyka częstotliwości momentu obrotowego to krzywa wykreślona między momentem obrotowym a częstotliwością silnika krokowego. Jest to nie tylko najważniejsza krzywa dynamiczna silnika krokowego, ale także podstawowa podstawa doboru silnika krokowego. Dynamiczny moment obrotowy silnika krokowego zależy od średniego prądu podczas pracy silnika krokowego. Im większy średni prąd, tym większy wyjściowy moment obrotowy silnika krokowego. Wyjściowy moment obrotowy silnika krokowego jest odwrotnie proporcjonalny do prędkości, co oznacza, że wyjściowy moment obrotowy silnika krokowego jest duży przy niskiej prędkości, a wyjściowy moment obrotowy jest mały przy dużej prędkości.
Faza
Faza odnosi się do liczby grup cewek silnika krokowego, na przykład 2-fazowy silnik krokowy ma 2 grupy cewek, a 3-fazowy silnik krokowy ma 3 grupy cewek. Silniki krokowe o różnych fazach mają różne efekty pracy. 2-fazowy silnik krokowy może zapewnić kąt kroku 0,9 i 1,8 1,8 stopnia, silnik 3-fazowy może zapewnić kąt kroku 1,2 stopnia. W większości przypadków częściej stosuje się 2-fazowe silniki krokowe. Jednak w środowisku pracy o dużej prędkości i wysokim momencie obrotowym bardziej praktyczny jest wybór 3-fazowego silnika krokowego.