le contrôle des moteurs pas à pas est un sujet vaste et cet article est un guide simplifié pour les débutants sur l’utilisation des moteurs pas à pas. Il couvre les bases du fonctionnement des moteurs pas à pas. Son but est d’aider les débutants à faire tourner les moteurs pas à pas.
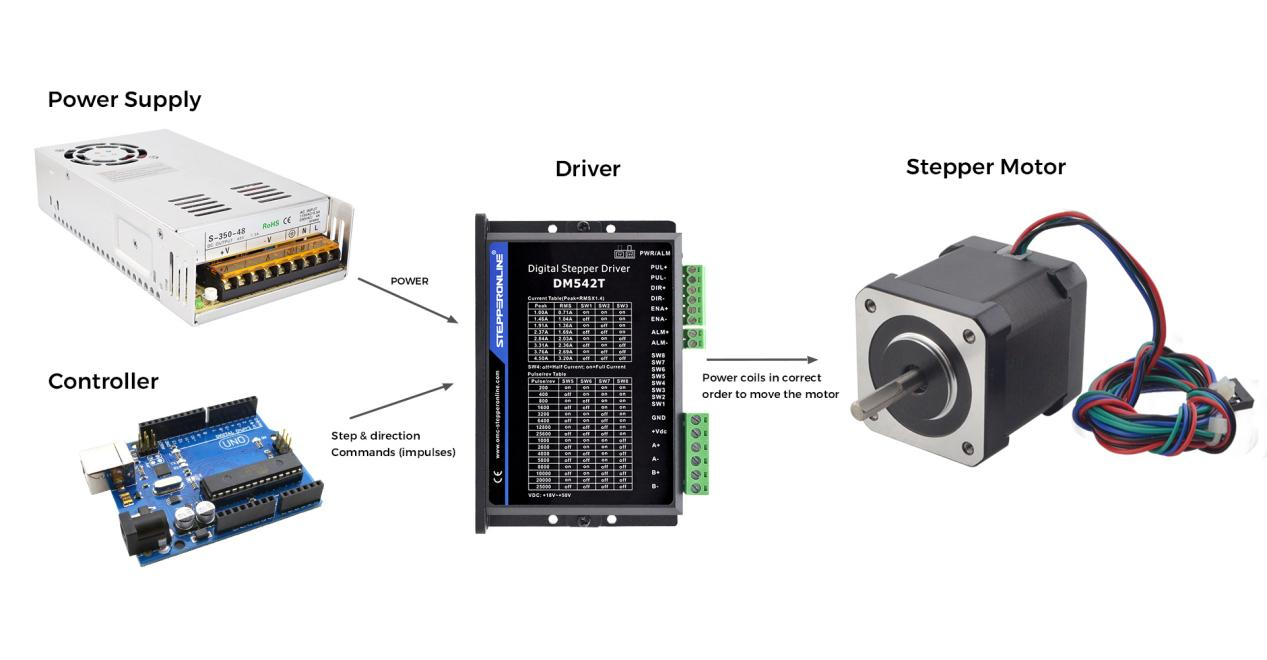
pour conduire un moteur pas à pas, vous avez généralement besoin de l’équipement suivant :
- moteur pas à pas
- pilote moteur pas à pas
- contrôleur
- alimentation à commutation
Comment choisir le bon équipement
1. Moteur pas à pas
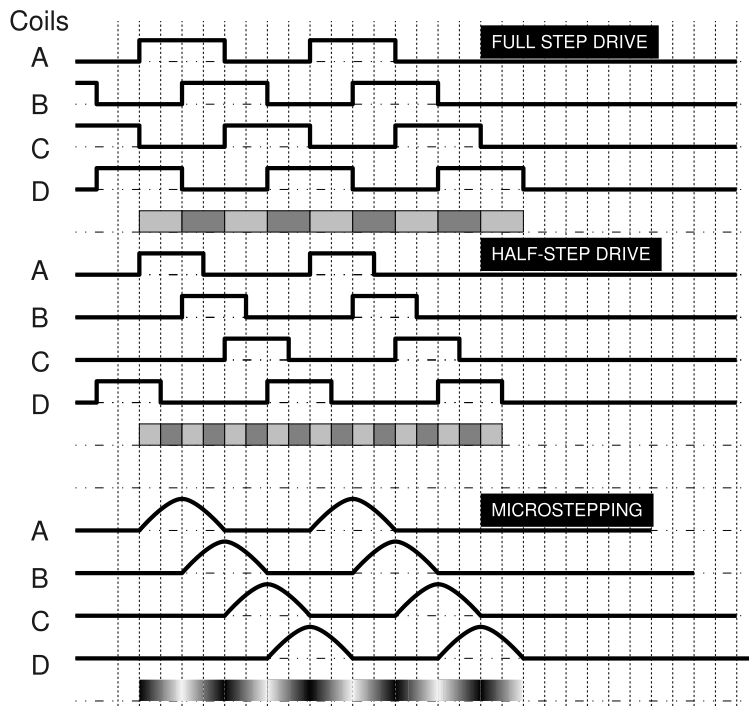
un moteur pas à pas est un dispositif électromagnétique qui se déplace par étapes discrètes. Il a plusieurs bobines qui sont organisées en phases. Lorsque chaque phase est mise sous tension à tour de rôle, le moteur marche. Avec les moteurs pas à pas, vous pouvez obtenir un positionnement précis et un contrôle de vitesse. Il existe trois principales façons de conduire un moteur pas à pas. Ces trois modes de conduite sont full step drive, half-step drive et microstepping.
vous devez sélectionner le bon moteur pas à pas pour vos exigences de vitesse et de couple en fonction de données telles que la taille du cadre, l’angle d’étape, le couple de maintien, le courant nominal, le nombre de fils, et unipolaire ou bipolaire. Je vais vous expliquer quelques-uns de ces concepts importants.
Nema: Nema n’est pas une norme pour les caractéristiques électriques des moteurs pas à pas. Il s’agit simplement d’un standard pour les plaques frontaux et les trous de montage pour faciliter l’interchangeabilité du moteur. Par exemple, le «17» dans «NEMA 17» fait référence à la taille de la façade, qui dans la norme NEMA est le «nombre» de NEMA divisé par 10 pouces. Ainsi, un moteur NEMA 17 a une plaque avant d’environ 1,7 pouces de large.
angle de pas : l’angle de pas indique l’angle de rotation du moteur pas à pas lorsque le système de commande envoie un signal d’impulsion pas à pas. L’angle d’étape du moteur pas à pas biphasé général est de 0,9 °/ 1,8 °, le moteur pas à pas triphasé est de 1,2 °, et le moteur pas à pas cinq phases est de 0,72 °.
couple de vitesse : les performances de fonctionnement des moteurs pas à pas à basse vitesse ont une importance plus pratique. Les moteurs pas à pas fonctionnent généralement à des vitesses de 300 à 600 tr/min. Etant donné que l’utilisateur utilise un dispositif de réduction mécanique pour supporter la charge, la vitesse normale du moteur est souvent sélectionnée à des dizaines de tours/minute pour fournir un couple suffisant pour le moteur. Dans ce cas, le moteur fournit une force élevée, un rendement élevé et un faible bruit.
quant au problème des vibrations, il devrait être résolu en augmentant la subdivision d’entraînement. La Subdivision est la commande du moteur par l’entraînement après que chaque impulsion envoyée par l’ordinateur supérieur est subdivisée par un multiplicateur réglé par l’entraînement. En termes simples, il s’agit de la réduction de l’angle de marche du moteur par le multiplicateur de subdivision.
vitesse du moteur formule de calcul: vitesse du moteur (unité: RPM) = fréquence d’impulsion (unité: Hz)*60/subdivision.
couple de maintien : le couple de maintien est la quantité de couple nécessaire pour déplacer le moteur une étape complète pendant que les spires sont sous tension et que le rotor est stationnaire. L’enroulement du moteur pas à pas est sous tension même si le rotor lui-même est stationnaire. Il s’agit de maintenir la charge en place à l’arrêt.
style de l’arbre : vous avez besoin de connaître la forme physique de cet arbre de moteur afin d’adapter votre moteur pas à pas aux engrenages, poulies et autres connexions externes tels que les coupleurs d’arbres. Il existe plusieurs formes communes. De plus, la longueur de l’arbre doit être prise en compte.
quelques types courants d’arbres sont énumérés ci-dessous :
- Round Shaft - round shaped shaft
- Arbre "D" - un arbre "en forme de D" qui est utile pour le montage des engrenages avec des vis de fixation.
- arbre d’engrenage - un arbre avec un engrenage gravé dedans.
- arbre à vis de plomb - un arbre en forme de vis, utilisé pour la construction d’actionneurs linéaires.
courant nominal : il s’agit du courant de crête. C’est une spécification utile car elle vous permet de sélectionner un pilote et une alimentation appropriés pour votre moteur pas à pas.
2. Pilote de moteur pas à pas
le pilote de moteur pas à pas doit généralement être utilisé conjointement avec le moteur pas à pas, donc lorsque vous achetez un moteur pas à pas, il est préférable d’assortir un pilote approprié en même temps pour réduire les problèmes plus tard.
presque tous les pilotes de moteur pas à pas utilisent un protocole standard pour contrôler le moteur. Il utilise 3 broches :
ENABLE - le pilote ne fonctionnera que lorsque la goupille ENABLE est tirée vers le bas ou vers le haut, selon le pilote.
DIRECTION - lorsque le moteur est bas, il tourne dans une DIRECTION et lorsqu’il est haut dans l’autre DIRECTION. Ceci est lié à la façon dont vous connectez le moteur.
STEP - chaque fois que la goupille de pas passe de bas en haut, le pas fait un pas (ou micropas, selon les réglages du pilote).
3. Contrôleur
le contrôleur de moteur pas à pas est capable d’envoyer des signaux d’impulsion à grande vitesse et est programmable. PLC, microcontrôleurs et autres dispositifs sont des contrôleurs communs sur le marché.
4. Alimentation à commutation
il est préférable d’utiliser une alimentation à commutation pour le moteur pas à pas. Il a une forte capacité anti-interférence et permet un large éventail de fluctuations. Le courant doit être sélectionné en fonction de la taille de la charge. Il faut laisser une certaine marge. Par exemple, le courant du moteur pas à pas est 3A, le courant de charge de contrôle 2A, l’alimentation de commutation doit être sélectionnée 6A à 8A.
Types de moteurs pas à pas, pilotes et schémas de câblage
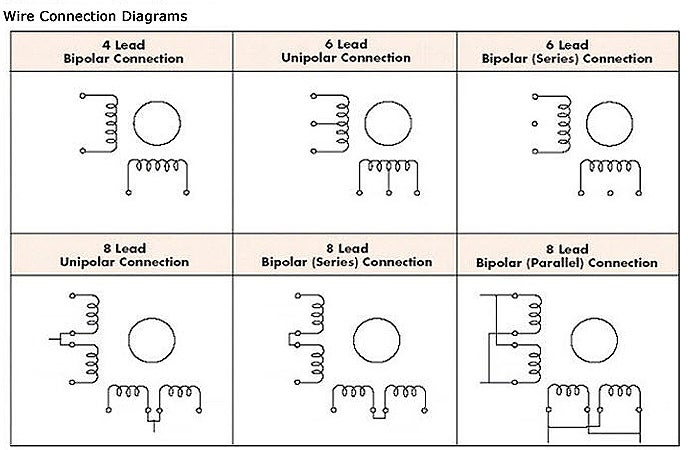
moteurs bipolaires et unipolaires
les moteurs pas à pas existent en deux types différents: unipolaires et bipolaires. La plus grande différence entre eux est que les deux types différents ont leurs propres arrangements de bobinage, et leurs arrangements respectifs de bobinage sont ce qui affectera la façon dont leurs moteurs pas à pas sont entraînés.
un moteur 4 fils ne peut être conduit que par un pilote bipolaire. Un moteur 5 fils ne peut être entraîné que par un conducteur unipolaire parce que le robinet central est attaché à l’intérieur. Les moteurs 6 et 8 fils peuvent utiliser les deux types de pilotes car vous pouvez décider comment les connecter à l’extérieur.
par essence, les moteurs unipolaires et bipolaires fonctionnent exactement de la même manière. Les électroaimants s’ouvrent de manière séquentielle, ce qui fait tourner l’arbre central du moteur. Ils diffèrent dans la façon dont les bobines à l’intérieur du moteur sont sous tension.
un moteur unipolaire réalise l’inversion de polarité à travers le taraude central de la bobine, mais n’excite que la moitié de la bobine en même temps, de sorte qu’il A moins de couple disponible.
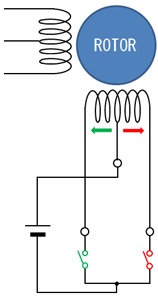
un pilote bipolaire utilise un circuit H-bridge pour inverser le courant traversant chaque phase. En alimentant alternativement chaque phase, toutes les bobines peuvent être utilisées pour faire tourner le moteur.
un moteur biphasé bipolaire A deux ensembles de bobines. Les moteurs biphasés bipolaires ont quatre fils, deux pour chaque phase. Pour certains moteurs à câblage flexible, il est possible de faire fonctionner le moteur bipolaire ou unipolaire.
Unipolar drive
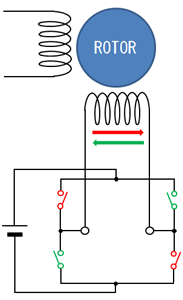
Bipolar drive
Conducteur de tension constante vs conducteur actuel Constant
il existe deux types de moteurs d’entraînement: unipolaire et bipolaire, et deux méthodes de contrôle du courant circulant à travers le moteur: tension constante et courant constant. Le conducteur de tension constante fournit une tension fixe au moteur, tandis que le conducteur de courant Constant assure un courant Constant au moteur en manipulant la tension. Le conducteur de tension constante est également connu comme conducteur de L/R. Le pilote à courant Constant est également connu sous le nom de pilote chopper.
en raison des limitations de couple et de vitesse des pilotes L/R, les pilotes à courant constant sont actuellement plus populaires. Les pilotes à tension constante sont le plus souvent utilisés pour les moteurs pas à pas unipolaires.
lors de l’utilisation de pilotes à tension constante, la tension nominale du moteur n’est généralement pas pertinente pour les applications pratiques. Par conséquent, ne soyez pas influencé par des moteurs pas à pas basés sur des valeurs de tension très basses. Une valeur importante à noter est le courant nominal. Les pilotes pas à pas de STEPPERONLINE sont actuellement des pilotes actuels constants!
un pilote à courant constant peut faire fonctionner un moteur pas à pas à une tension beaucoup plus élevée que la tension nominale du moteur. La tension plus élevée permet au courant de circuler plus rapidement à travers le moteur pas à pas, ce qui lui permet de tourner plus rapidement et d’obtenir plus de couple. Le conducteur maintient le courant dans le moteur en dessous d’une valeur fixe, ce qui empêche le moteur de brûler. Le courant fixe est généralement réglé par un pot de finition sur la carte d’entraînement. Cela vous permet de changer le courant maximum en fonction du couple nécessaire et du courant nominal de la spécification du moteur. De plus, une tension plus élevée signifie moins de chaleur.
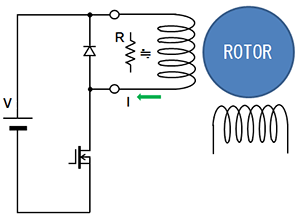
Constant voltage drive
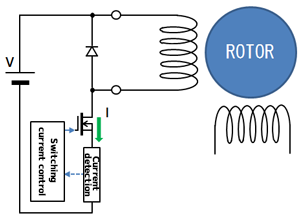
Constant current drive
Comment câbler un moteur pas à pas à un pilote
vous devez déterminer quels fils composent les paires de bobines. Voici trois façons de le comprendre.
1. Vous pouvez utiliser un multimètre et mesurer la résistance entre les fils provenant du moteur pas à pas. Si vous avez une lecture, c’est une paire. Sinon, ce n’est pas une paire.
2. De plus, si vous n’avez pas de multimètre, tournez le moteur en touchant les fils. Quelle que soit la combinaison qui rend difficile le déplacement du moteur, c’est une paire.
3. Bien sûr, il n’est pas pratique de trier toutes les combinaisons possibles de connexions avec un ohmmètre ou par sensation. Il est encore plus facile de connecter le moteur selon sa fiche technique. En supposant que vous n’en ayez pas déjà un, lisez le numéro de modèle du moteur et effectuez une recherche en ligne. Vous devrez peut-être contacter le fournisseur pour obtenir la fiche technique du moteur. STEPPERONLINE fournit la fiche technique appropriée, ou vous pouvez contacter le service client si quelque chose n’est pas encore clair.
le schéma suivant montre plusieurs arrangements d’enroulement différents: