







































































 Leitung 10,16mm(0,4\") mit Sensor")
 Leitung 5,08mm(0,2\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 8mm(0,314961\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 2.54mm(0.1\") mit Sensor")
 Leitung 4mm(0,15748\") mit Sensor")
 Leitung 2mm(0,07874\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 10,16mm(0,4\") mit Sensor")
 Leitung 5,08mm(0,2\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")














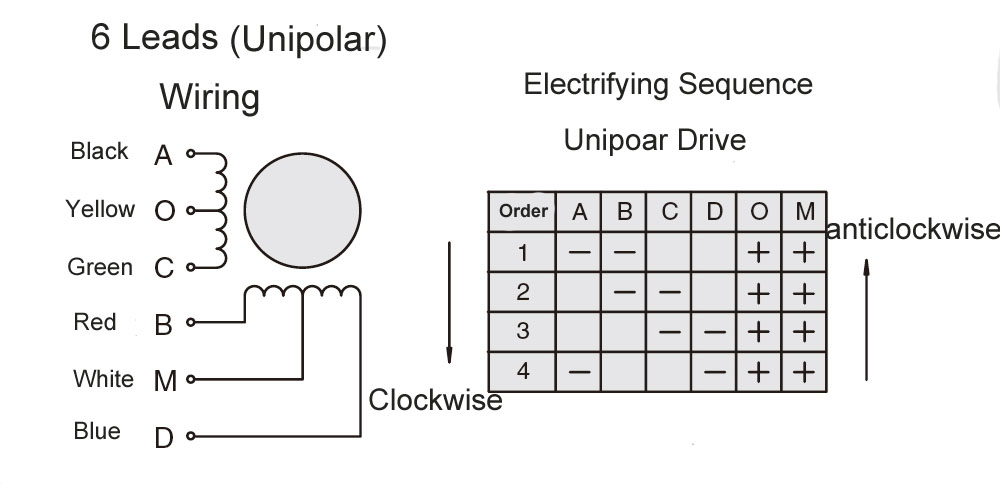
Unipolarer Antrieb: Die verschiedenen Wicklungen des Motors werden nach einem bestimmten Muster nacheinander erregt, die Stromrichtung jeder Wicklung ist jedoch immer gleich, was als unipolarer Antrieb bezeichnet wird.
Eine unipolare Antriebsschaltung verwendet vier Transistoren, um die beiden Phasen eines Schrittmotors zu steuern. Die Statorwicklungsstruktur des Motors besteht aus zwei Spulensätzen mit einer Mittelanzapfung, wie in Abbildung 1 dargestellt. Der gesamte Motor verfügt über sechs Drähte, die mit der Außenwelt verbunden sind. Die AC-Seite kann nicht gleichzeitig mit Strom versorgt werden (dasselbe gilt für die BD-Seite), da sich sonst der von den beiden Spulen am Magnetpol erzeugte Magnetfluss gegenseitig aufhebt und nur der Kupferverlust der Spule entsteht. Da er tatsächlich nur zwei Phasen hat (die AC-Wicklung ist einphasig und die BD-Wicklung ist einphasig), sollte die korrekte Bezeichnung ein zweiphasiger Sechsleiter-Schrittmotor sein.
Die Treiberschaltung für einen bipolaren Schrittmotor ist in Abbildung 2 dargestellt, die acht Transistoren verwendet, um zwei Phasensätze anzutreiben. Die Magnetpole des Stators sind mit einer einzelnen Spule gewickelt, und die Richtung des Magnetpols wird durch Ändern der Stromrichtung der Spulen AC und BD umgeschaltet. In der frühen Entwicklung von Schrittmotoren gewannen unipolare Motoren aufgrund der Kosten für Halbleiterkomponenten an Bedeutung, da sie weniger Transistoren im Steuerkreis erforderten. Mit der rasanten Entwicklung von Halbleitermaterialien in den 1950er und 1960er Jahren sanken die Kosten für Transistoren jedoch erheblich, und bipolare Motoren erlebten aufgrund ihrer Leistungsvorteile einen starken Anstieg der Verwendung.
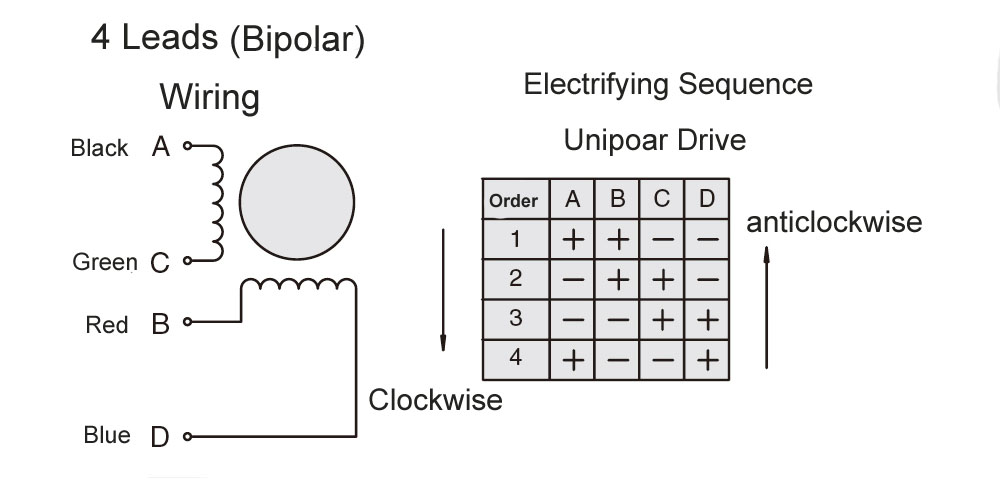
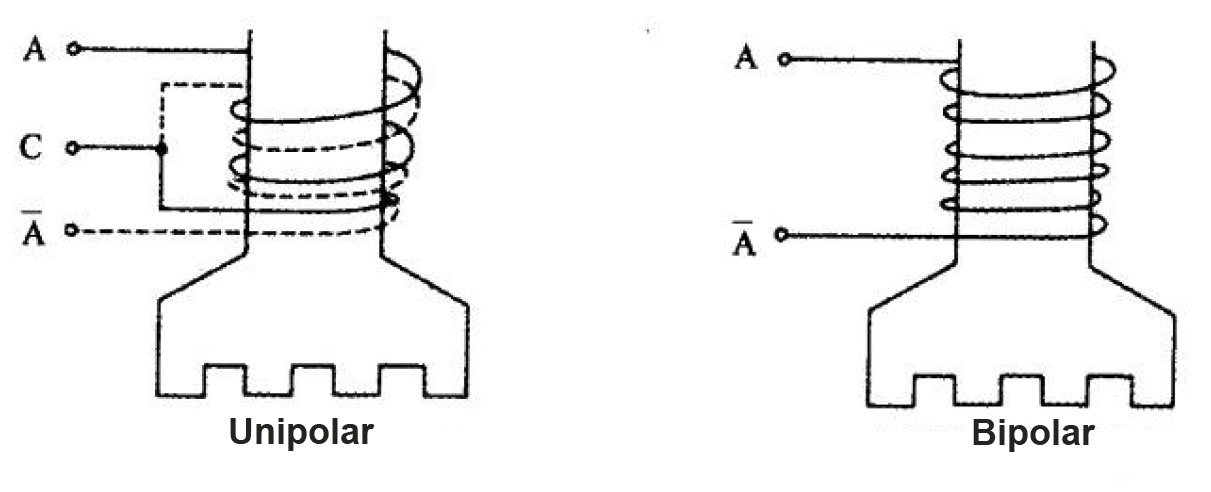
Abbildung 3 zeigt zwei Wickelmethoden: unipolar und bipolar. Bei gleichem Drahtdurchmesser beträgt die Windungszahl der Spulenwicklung beim unipolaren Verfahren N, der Widerstand R und die Windungszahl der Spulenwicklung beim bipolaren Verfahren 2N. , der Spulenwiderstand beträgt 2R.
Die folgende Tabelle vergleicht die Effizienz von unipolarem und bipolarem Antrieb in einer Konstantspannungs-Antriebsschaltung bei niedrigen Geschwindigkeiten. Das Produkt aus Strom und Spulenwindungen wird Amperewindungen genannt und ist proportional zum Drehmoment. Wenn beide die gleiche Geschwindigkeit haben, ist die Ausgangsleistung proportional zu Amperewindungen. Ebenso beträgt der bipolare Strom V/2R und die Anzahl der Windungen beträgt ebenfalls 2N, und das Produkt ist das gleiche wie das des unipolaren Stroms, nämlich VN/R. Im Falle eines Antriebs mit konstanter Eingangsspannung ist der Vergleich zwischen unipolarem und bipolarem Antrieb in der folgenden Tabelle dargestellt. Der Strom beträgt nur die Hälfte des unipolaren Stroms und der Wirkungsgrad bei niedrigen Geschwindigkeiten ist doppelt so hoch wie der des unipolaren.
Wenn daher bei Anwendungen mit kleinen oder niedrigen Drehzahlen ein hohes Drehmoment erforderlich ist, sollte ein bipolarer Motor und Treiber verwendet werden. Bei Hochgeschwindigkeitsanwendungen erhöht sich die Windungszahl des Bipolarmotors, die Induktivität wird größer und die Gegen-EMK nimmt zu, was den Strom und damit das Drehmoment verringert. Daher sollte auf einen Vergleich des Drehmoments mit dem eines unipolaren Motors geachtet werden.
| Unipolar | Bipolar | |
| Ampere Tturns | U1=V*N/R | U2=V*2N/2R=V*N/R |
| Input Power | W1=V²/R | W2=(V/2R)²*2R=V²/2R |
| Efficiency | η=U1/W1=N/V | η=U2/W2=2N/V |
Hinweis: V ist die angelegte Spannung; R ist der Widerstand der Motorspule; N ist die Anzahl der unipolaren Windungen
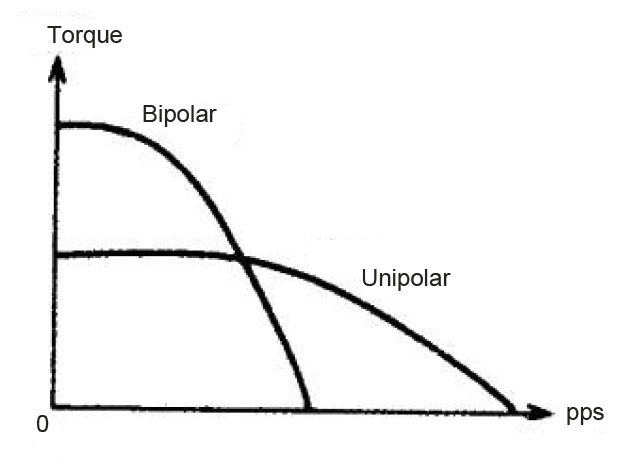
Abbildung 4 zeigt die Kennlinien des unipolaren Schrittmotors und des bipolaren Schrittmotors, die beide den gleichen Konstantstrom-Antriebsmodus verwenden. Im Allgemeinen werden bei Lastanwendungen mit niedriger Drehzahl und hohem Drehmoment bipolare Antriebe verwendet, während bei Hochgeschwindigkeits-Antriebsanwendungen unipolare Antriebe zum Einsatz kommen.
 0.3A 42x42x34mm 6 Drähte")
 0.3A 42x42x34mm 6 Drähte")
 0.4A 42x42x39mm 6 Drähte")
 0.8A 42x42x40mm 6 Drähte")
 0.4A 42x42x48mm 6 Drähte")
 3A 57x57x56mm 8 Drähte")
 4A 57x57x84mm 8 Drähte")
 4A 57x57x84mm 8 Drähte")
 60x60x100mm 8 Drähte")