







































































 Leitung 10,16mm(0,4\") mit Sensor")
 Leitung 5,08mm(0,2\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 8mm(0,314961\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 2.54mm(0.1\") mit Sensor")
 Leitung 4mm(0,15748\") mit Sensor")
 Leitung 2mm(0,07874\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 10,16mm(0,4\") mit Sensor")
 Leitung 5,08mm(0,2\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
 Nema 23 Schrittmotor und Treiber")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
 Nema 34 Schrittmotor und Treiber")
 Nema 23 Schrittmotor und Treiber")
 Nema 34 Schrittmotor und Treiber")
 Nema 34 Schrittmotor und Treiber")
 Nema 34 Schrittmotore & Schrittmotortreiber & 60V Netzteil")














In einem Artikel erfahren Sie alles über Schrittmotoren
Bitte klicken Sie direkt auf das Kapitel, das Sie interessiert.
● Was ist ein Schrittmotor?
Ein Schrittmotor ist ein bürstenloser synchroner Gleichstrommotor, der digitale Impulse in die Drehung einer mechanischen Achse umwandelt. Im Gegensatz zu vielen anderen Standardmotortypen dreht sich ein Schrittmotor nicht kontinuierlich für eine beliebige Anzahl von Umdrehungen, bis die an ihn angelegte Gleichspannung unterbrochen wird . Er verfügt über mehrere Spulen, die in Gruppen, den sogenannten „Phasen“, organisiert sind. Wird jede Phase nacheinander eingeschaltet, dreht sich der Motor Schritt für Schritt.
Schrittmotoren unterteilen die gesamte Drehbewegung in mehrere gleiche Schritte. Solange der Motor für das Drehmoment und die Geschwindigkeit der Anwendung geeignet dimensioniert ist, kann die Position des Motors so gesteuert werden, dass er sich in einem dieser Schritte bewegt und dort ohne Rückmeldung bleibt von einem Positionssensor.
Darüber hinaus ist ein Schrittmotor ein digitales Ein- und Ausgabegerät. Er eignet sich besonders für Anwendungen, bei denen das Steuersignal in Form digitaler Impulse und nicht in Form analoger Spannungen vorliegt. Ein an einen Schrittmotortreiber gesendeter digitaler Impuls bewirkt Der Motor vergrößert einen bestimmten Bewegungswinkel. Mit zunehmender Frequenz der digitalen Impulse wird die Schrittbewegung zu einer kontinuierlichen Drehung.
Mit computergesteuerter Schrittsteuerung können Sie eine sehr präzise Positionierung und/oder Geschwindigkeitssteuerung erreichen. Daher sind Schrittmotoren für viele Präzisionsbewegungssteuerungsanwendungen zum Motor der Wahl geworden.
● Wie funktioniert ein Schrittmotor?
Wenn Strom durch die Statorwicklung fließt, erzeugt die Statorwicklung ein Vektormagnetfeld. Dieses Magnetfeld treibt den Rotor dazu, sich in einem bestimmten Winkel zu drehen, sodass die Richtung des Rotormagnetfelds mit der Richtung des Statormagnetfelds übereinstimmt. Wenn sich das Vektormagnetfeld des Stators um einen Winkel dreht. Der Rotor dreht sich ebenfalls in einem Winkel zu diesem Magnetfeld. Jedes Mal, wenn ein elektrischer Impuls eingegeben wird, dreht sich der Motor um einen Winkel und bewegt sich einen Schritt vorwärts. Seine Ausgangswinkelverschiebung ist proportional zur Anzahl der Eingangsimpulse und seine Drehzahl ist proportional zur Impulsfrequenz. Ändern Sie die Reihenfolge, in der die Wicklungen erregt werden, und der Motor kehrt die Richtung um. Daher kann die Drehung des Schrittmotors durch Steuerung der Impulszahl gesteuert werden , Frequenz und Bestromungssequenz jeder Phasenwicklung des Motors.
Gängige Motortypen haben Eisenkerne und Wicklungsspulen im Inneren. Die Wicklung hat einen Widerstand und verursacht Verluste, wenn Strom angelegt wird. Die Größe des Verlusts ist proportional zum Widerstand und zum Quadrat des Stroms. Dies wird oft als Kupferverlust bezeichnet Wenn es sich bei dem Strom nicht um einen Standard-Gleichstrom oder eine Sinuswelle handelt, kommt es auch zu Oberschwingungsverlusten; der Eisenkern weist eine Hysterese auf. Der Wirbelstromeffekt erzeugt auch Verluste im magnetischen Wechselfeld, und seine Größe hängt vom Material, dem Strom und dem Strom ab. Frequenz und Spannung. Dies wird als Eisenverlust bezeichnet.
Sowohl Kupfer- als auch Eisenverluste treten in Form von Wärme auf und beeinträchtigen den Wirkungsgrad des Motors. Schrittmotoren streben im Allgemeinen nach Positionierungsgenauigkeit und Drehmomentabgabe, und ihr Wirkungsgrad ist relativ gering. Der Strom ist im Allgemeinen größer und hat einen höheren Oberwellengehalt. Die Frequenz von Mit der Änderung der Drehzahl ändert sich auch der Stromwechsel, weshalb es bei Schrittmotoren häufig zu einer stärkeren Erwärmung als normal kommt.
Der Motor wandelt elektrische Energie in mechanische Energie um, und der Schrittmotor ist ein Steuerelement mit offenem Regelkreis, das elektrische Impulssignale in Winkelverschiebung oder lineare Verschiebung umwandelt. Unter Nichtüberlastbedingungen hängen Geschwindigkeit und Stoppposition des Motors nur von der Frequenz und ab Anzahl der Impulse des Impulssignals und werden von Laständerungen nicht beeinflusst. Mit anderen Worten, wenn dem Motor ein Impulssignal hinzugefügt wird, dreht sich der Motor um einen Schrittwinkel. Das Vorhandensein dieser linearen Beziehung, gekoppelt mit den Eigenschaften von der Schrittmotor, der nur periodische Fehler und keine akkumulierten Fehler aufweist. Dadurch ist es sehr einfach, Schrittmotoren zur Steuerung von Geschwindigkeit, Position und anderen Steuerbereichen zu verwenden.
● Schrittmotorgröße
Schrittmotoren werden nach Baugröße klassifiziert, beispielsweise „Nema 17“ oder „Nema 23“. Haben Sie sich jemals gefragt, wie das passiert oder was es bedeutet? Die American Electrical Manufacturers Association legt Standards für viele elektrische Produkte fest, einschließlich Schrittmotoren. Im Allgemeinen gilt: „ Nema 17" bedeutet, dass die Montagefläche des Motors 1,7 Zoll im Quadrat beträgt. Daher betragen die Abmessungen des Nema 23-Schrittmotors 2,3 Zoll im Quadrat. Oder 57mm, wie unten gezeigt.
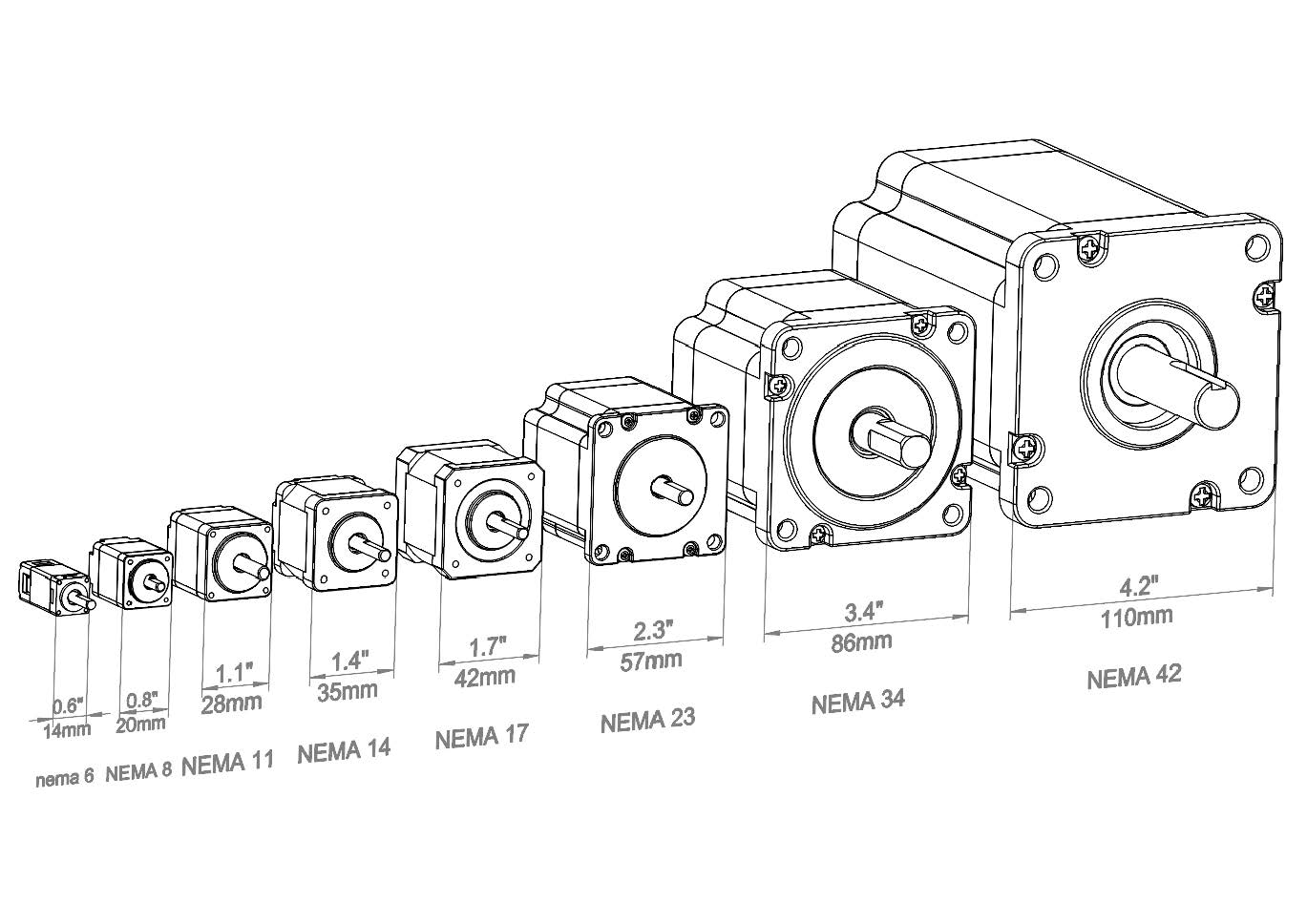
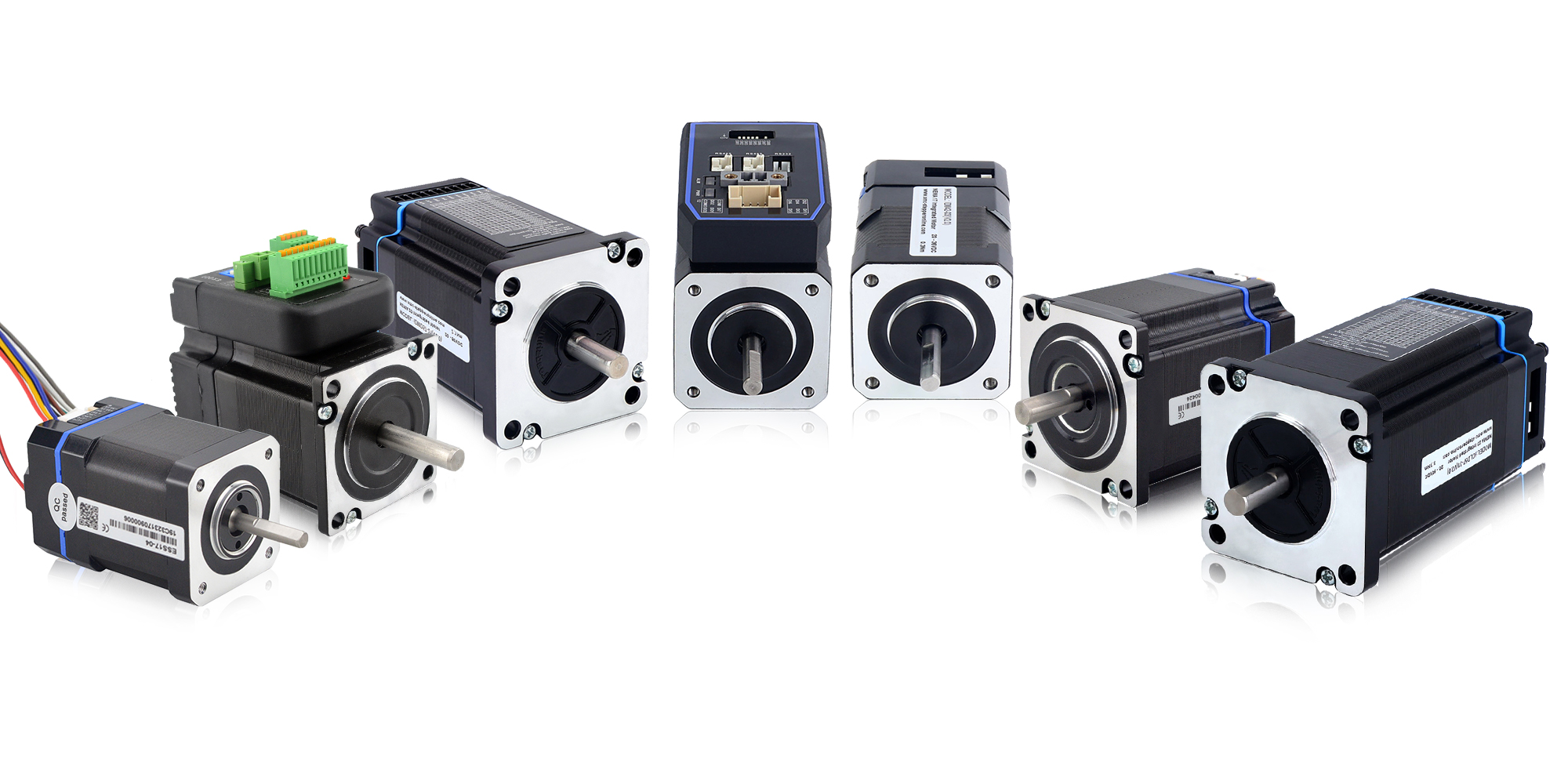
Das Foto unten zeigt Schrittmotoren der Nema-Größe 06, 08, 11, 14, 17, 23, 24, 34 und 42. Größe 24 ist eine kleine Anomalie – es gibt keine offizielle Nema-Definition für Größe 24. Die Montage erfolgt ähnlich Größe 23, ist jedoch etwas breiter (ca. 4 mm), was den Einsatz größerer Rotoren und Statoren und damit ca. 30% mehr Drehmoment ermöglicht.

Im Wesentlichen sind sich die Hersteller über den vorgeschlagenen Standard einig. Dies gibt den Herstellern eine größere Designflexibilität, da sie im Voraus wissen, dass ein Nema 17-Motor in eine andere Nema 17-Halterung passt, ohne dass etwas neu konstruiert werden muss, insbesondere wenn sie sich für einen Wechsel des Motorlieferanten entscheiden.
● Schrittmotortypen
Es gibt viele Arten von Schrittmotoren, die von STEPPERONLINE verkauft werden. Wenn Sie die Eigenschaften und Verwendungszwecke verschiedener Schrittmotortypen kennen, können Sie entscheiden, welcher Typ für Sie am besten geeignet ist.
Der Hybrid-Schrittmotor ist eine Kombination aus einem Motor mit variabler Reluktanz und einem Permanentmagnetmotor. Der Stator wird wie ein Schrittmotor mit variabler Reluktanz elektromagnetisch angeregt, und der Rotor des Schrittmotors ist wie ein Permanentmagnet-Schrittmotor axial magnetisiert. Dieser Schrittmotor ist ein Aktuator, der elektrische Energie umwandelt Impulse in Winkelverschiebung.
Im Vergleich zu den beiden anderen Arten von Schrittmotoren bieten Hybrid-Schrittmotoren ein höheres Drehmoment bei kleinerem Schrittwinkel und verfügen über bessere dynamische Eigenschaften. Mit der Entwicklung von Wissenschaft und Technologie, insbesondere der Entwicklung von Permanentmagnetmaterialien, Halbleitertechnologie und Computertechnologie, sind diese Schrittmotoren werden häufig in der industriellen Automatisierung, Robotik, Textil- und Medizinindustrie eingesetzt.
Ein Schrittmotor mit geschlossenem Regelkreis ist ein Schrittmotor mit einem Encoder am Ende des Motors, um eine Regelung mit geschlossenem Regelkreis zu erreichen. Die Regelung eines Schrittmotors mit geschlossenem Regelkreis ist ein Servosystem, das Positionsrückmeldung und/oder Geschwindigkeitsrückmeldung verwendet Bestimmen Sie die Phasenänderung entsprechend der Rotorposition, wodurch die Leistung des Schrittmotors erheblich verbessert werden kann, ohne dass Schritte verloren gehen.
Der Schrittmotor mit geschlossenem Regelkreis verfügt über eine Doppelwicklungsstruktur und sein Motor verwendet einen hochpräzisen Linearencoder. Jedes Mal, wenn der Motor ein Bild dreht, gibt der Encoder einen Impuls aus, sodass die genaue Drehposition des Motors ermittelt werden kann erhalten, während gewöhnliche Schrittmotoren nur eine haben. Die Position der Wicklung und der Motordrehung ist unzuverlässig.

Der Schrittmotor mit geschlossenem Regelkreis übernimmt die Latch-Steuerung, die die Eingabe eines Referenzimpulses erfordert. Durch die Rückkopplungssteuerung kann der Steuerimpuls synchronisiert werden. Die Drehposition des Motors kann konstant gehalten werden, während der gewöhnliche Schrittmotor mit offenem Regelkreis arbeitet Steuerung und muss keinen Referenzimpuls eingeben. Nur die Schrittfrequenz und die Richtung des Motors müssen gesteuert werden, und die Drehposition des Motors ist nicht steuerbar.
Im Vergleich zu gewöhnlichen Schrittmotoren verfügen Schrittmotoren mit geschlossenem Regelkreis über höhere dynamische Reaktionsfähigkeiten und können eine präzise Drehpositionssteuerung mit kleinen Positionsfehlern erreichen. Darüber hinaus verfügen sie über eine hohe Präzision und die Positionsgenauigkeit kann innerhalb von 0,1 Grad gesteuert werden, während die Positionsgenauigkeit Normale Schrittmotoren können nur innerhalb von 1 Grad gesteuert werden, was eine schlechte Betriebsstabilität und große Positionsfehler zur Folge hat.
Darüber hinaus haben Schrittmotoren mit geschlossenem Regelkreis eine höhere Belastbarkeit und können größeren Belastungen standhalten, während gewöhnliche Schrittmotoren eine geringere Belastbarkeit und eine schlechtere Lebensdauer haben.
Integrierte Schrittmotoren kombinieren Schrittantriebe und Motoren in einer einzigen Einheit. Integrierte Schrittmotoren bieten ein platzsparendes Design, das die Verkabelung reduziert und Kosten im Vergleich zu separaten Motor- und Antriebskomponenten spart. Sie sind ideal für Anwendungen wie Verpackung und Etikettierung, automatisierte Tests und Messtechnik, automatisierte Montage und Biowissenschaften.
Weitere Vorteile der Integration von Motoren und Antriebseinheiten sind die einfache Implementierung, die geringere Verkabelungskomplexität, die schnellere Systemeinrichtung und -konstruktion sowie die garantierte Motor-Antriebs-Kompatibilität.
● Permanentmagnet-Schrittmotor
Permanentmagnetmotoren verwenden einen Permanentmagneten (PM) im Rotor und arbeiten mit der Anziehung oder Abstoßung zwischen dem Rotormagneten und den Statorelektromagneten. Der Rotor des Permanentmagnet-Schrittmotors besteht aus Permanentmagnetstahl. Der Stator des Schrittmotors ist es durch Stanzen zu einem klauenförmigen Zahnpol verarbeitet, und der Rotor besteht aus permanentmagnetischem Magnetstahl mit radialer Mehrpolmagnetisierung. Das durch die Richtung des Spulenstroms erzeugte Magnetfeld schließt sich gegenseitig mit dem Rotormagnetfeld aus, so dass Der Motor dreht rückwärts.
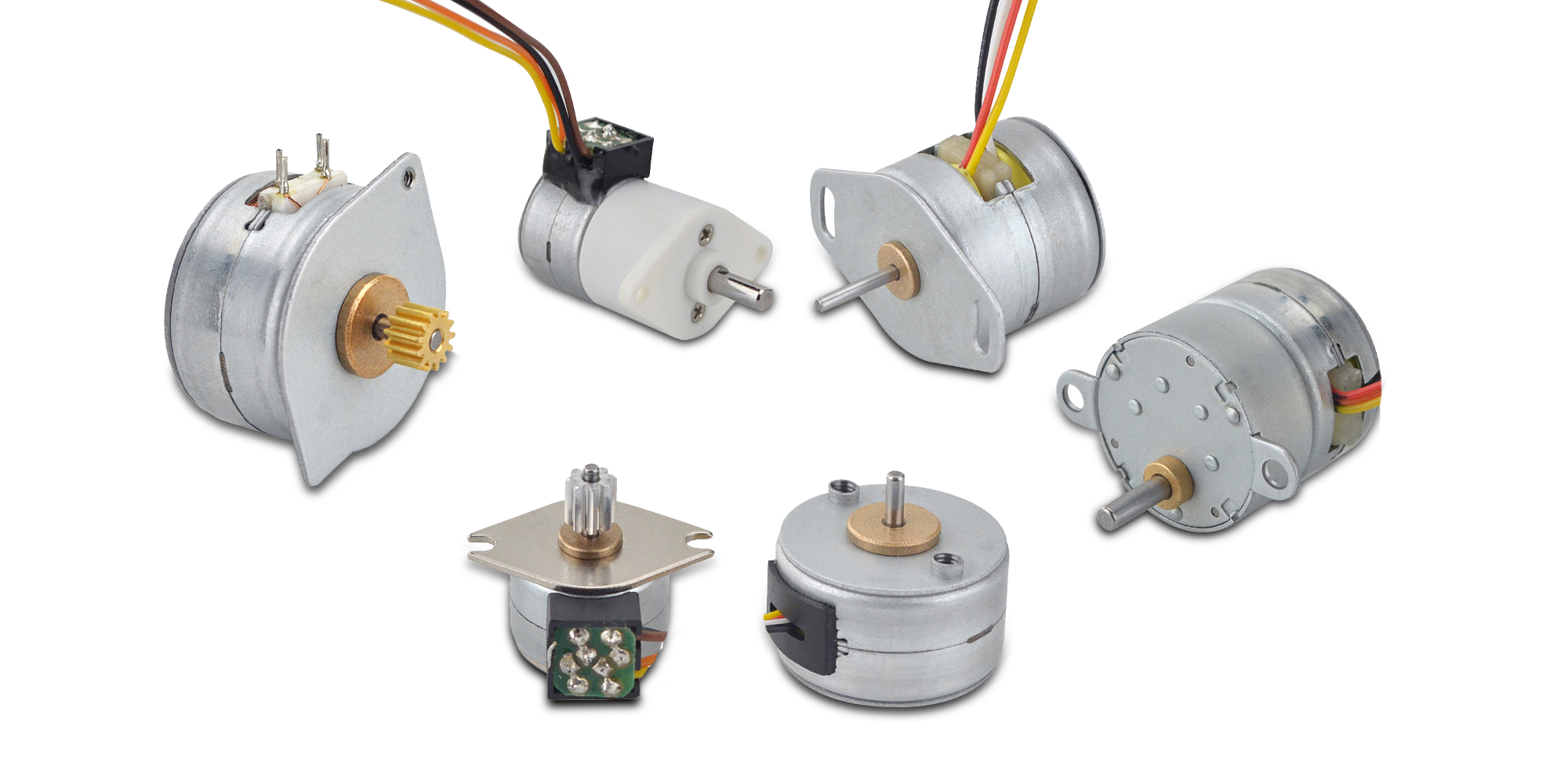
Dieser Schrittmotor ist auch als PM-Schrittmotor bekannt. Die axiale Richtung des gesamten Motorstators und -rotors ist in zwei Abschnitte unterteilt, und die Mitte ist durch ein magnetisches Trennstück getrennt. Die beiden Abschnitte sind durch einen Schrittwinkel voneinander getrennt Jeder besteht aus einem Stator, einem Rotor und einer Ringwicklung, die auf den Stator aufgesetzt ist. Der PM-Schrittmotor wird hauptsächlich in Computerperipheriegeräten, Fotosystemen, optoelektronischen Kombinationsgeräten, Ventilsteuerungen, Kernreaktoren, Bankterminals und CNC-Werkzeugmaschinen eingesetzt , automatische Aufzugsmaschinen, elektronische Uhren und medizinische Geräte usw.
● Schrittmotor mit variabler Reluktanz
Ein Schrittmotor mit variabler Reluktanz ist eine Art Elektromotor, der nach dem Prinzip der magnetischen Reluktanz arbeitet. Dieser Motor besteht aus einem Eisenrotor und mehreren Statorwicklungen. Die Wicklungen werden in einer bestimmten Reihenfolge magnetisiert, wodurch sich der Rotor in diskreten Schritten bewegt.
Schrittmotoren mit variabler Reluktanz bieten hohe Schrittraten und ein gutes Drehmoment bei niedrigen Drehzahlen. Bei höheren Drehzahlen kann die Leistung jedoch aufgrund von Resonanzproblemen weniger zufriedenstellend sein.
Schrittmotoren mit variabler Reluktanz gelten als robust und zuverlässig und eignen sich daher für Umgebungen, in denen der Motor rauen Bedingungen ausgesetzt sein kann.
Einer der Hauptnachteile von Schrittmotoren mit variabler Reluktanz besteht darin, dass sie tendenziell lauter sind als andere Arten von Schrittmotoren. Dies liegt daran, dass der Rotor schlecht gedämpft ist, was zu höheren mechanischen Vibrationen führt.
Lineare Schrittmotoren sind eine besondere Art von Schrittmotoren, deren Design und Funktionsprinzip sich von herkömmlichen rotierenden Schrittmotoren unterscheiden. Ein linearer Schrittmotor ist ein Linearmotor, der eine lineare Verschiebung durch lineare Bewegung und nicht durch eine Rotationsbewegung erreicht, die bei herkömmlichen Schrittmotoren erreicht wird Der Aufbau eines linearen Schrittmotors besteht normalerweise aus einem festen Stator und einem beweglichen Läufer. Der Stator ist im Inneren mit Spulen ausgestattet, und der Läufer ist mit Permanentmagneten ausgestattet. Wenn Strom durch die Statorspule fließt, wird ein Magnetfeld erzeugt. Die Wechselwirkung Zwischen dem Permanentmagneten am Schieber und dem Magnetfeld des Stators wird eine Anziehungs- oder Abstoßungskraft erzeugt, wodurch sich der Schieber linear auf der festen Achse bewegt. Die Steuerung eines linearen Schrittmotors ähnelt der eines herkömmlichen Schrittmotors. Durch Steuerung der Richtung Durch die Größe und Stärke des Stroms können Position und Geschwindigkeit des Schiebers gesteuert werden. Das Impulssignal jedes Schrittmotors bewegt den Schieber um einen festen Schritt, sodass eine präzise lineare Verschiebung erreicht werden kann.

Es gibt drei gängige Arten von linearen Schrittmotoren: externer Antrieb, Durchgangswelle und feste Welle. Sie können entsprechend den Schlüsselindikatoren spezifischer Anwendungen ausgewählt werden. Lineare Schrittmotoren haben die Vorteile einer hochpräzisen, spielfreien Übertragung, und schnelle Reaktion, weshalb sie in Anwendungen bevorzugt werden, die eine leistungsstarke lineare Bewegungssteuerung erfordern.
● Unipolar vs. Bipolar
Ein Schrittmotor ist ein Motor, der den Drehwinkel durch elektrische Impulse steuert. Bipolare Schrittmotoren und unipolare Schrittmotoren sind zwei gängige Arten von Schrittmotoren. Der Hauptunterschied zwischen ihnen ist die Steuerungsmethode. Ein bipolarer Schrittmotor muss den Strom umkehren Ändern Sie die Richtung des Rotors, daher sind 4 Elektroden erforderlich, um die Richtung zu steuern. Jede Elektrode hat zwei Zustände (EIN/AUS).
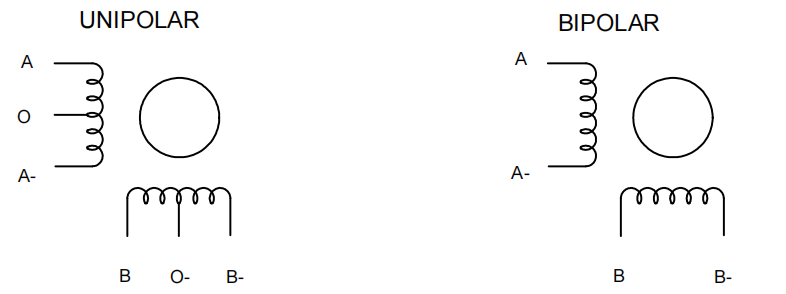
Ein unipolarer Schrittmotor benötigt nur zwei Elektroden, um die Drehung des Rotors zu steuern, und der Motor dreht sich, indem er die Richtung des Stroms ändert. Daher benötigen unipolare Schrittmotoren im Vergleich zu bipolaren Schrittmotoren nur zwei Elektroden, um die gleiche Bewegungssteuerung zu erreichen. Da unipolare Schrittmotoren jedoch die Hinzufügung eines unipolaren Treibers im Steuerkreis erfordern, ist der Schaltungsaufwand etwas höher.
Bipolare Schrittmotoren und unipolare Schrittmotoren haben jeweils ihre eigenen Vor- und Nachteile, und je nach Anwendungsszenario kann der passende Motor ausgewählt werden.
Die Vorteile bipolarer Schrittmotoren sind großes Drehmoment, hohe Geschwindigkeit, hohe Präzision und einfache Steuerung. Daher werden sie häufig in Situationen eingesetzt, in denen eine hohe Geschwindigkeit und hochpräzise Steuerung erforderlich ist. Das Drehmoment und die Präzision unipolarer Schrittmotoren werden mit denen verglichen die von bipolaren Schrittmotoren. Der Motor ist schlechter und langsamer. Darüber hinaus sind die in unipolaren Schrittmotoren verwendeten Treiber teuer und bieten weniger Optionen.
● Wie wählt man Schrittmotor, Treiber und Netzteil aus?
Schrittmotoren sind eine gute Wahl, wenn Sie Bewegungen steuern müssen. Sie können in Szenarien eingesetzt werden, in denen eine Steuerung von Drehwinkel, Geschwindigkeit, Position und Synchronisation erforderlich ist.
Wenn wir uns für einen Schrittmotor entscheiden, müssen mehrere Faktoren berücksichtigt werden.
1. Wie ist der Motor an die Last gekoppelt?
Nachdem Sie die Art der Kopplung zwischen Motor und Last bestimmt haben, können Sie anhand der Wellenlänge, des Durchmessers und des Wellentyps einen Schrittmotor auswählen. Derzeit verfügen die Standard-Schrittmotoren von STEPPERONLINE über eine Vielzahl von Wellenlängen, Wellendurchmessern und Wellentypen und können verschiedene maßgeschneiderte Leistungen für die Motorwelle bieten.2. Wie schnell muss sich die Last bewegen oder beschleunigen?
Bei der Auswahl des richtigen Motors müssen Sie das Gleichgewicht zwischen Geschwindigkeit und Last berücksichtigen. Für einige Geräte, die schnelle Bewegungen erfordern, können wir Hochgeschwindigkeitsmotoren wählen. Wenn die Last jedoch größer ist, müssen wir einen Motor mit größerem Drehmoment wählen. Daher müssen Sie bei der Auswahl eines Motors das Gleichgewicht zwischen Geschwindigkeit und Last entsprechend den tatsächlichen Anforderungen berücksichtigen und einen Motor auswählen, der sowohl der Bewegungsgeschwindigkeit als auch der Last gerecht wird. Im Folgenden sind die Höchstgeschwindigkeit und die empfohlene Geschwindigkeit der einzelnen Motorgrößen im Leerlauf aufgeführt.
| Leerlaufgeschwindigkeit | |||
| Motorentyp | Maße(mm) | Max. Geschwindigkeit(rpm) | Empfohlene Arbeitsgeschwindigkeit(rpm) |
| Open-Loop-Motor | Nema 6(14x14) | 1000 | 100-600 |
| Nema 8(20x20) | 1000 | 100-600 | |
| Nema 11(28x28) | 1000 | 100-600 | |
| Nema 14(35x35) | 1000 | 100-600 | |
| Nema 16(40x40) | 1000 | 100-500 | |
| Nema 17(42x42) | 1000 | 100-500 | |
| Nema 23(57x57) | 1000 | 100-500 | |
| Nema 24(60x60) | 1000 | 100-500 | |
| Nema 34(86x86) | 1000 | 100-400 | |
| Nema 42(110x110) | 500 | 100-300 | |
| Closed-Loop-Motor | Nema 8(20x20) | 2000 | 100-1500 |
| Nema 11(28x28) | 2000 | 100-1500 | |
| Nema 14(35x35) | 2000 | 100-1000 | |
| Nema 17(42x42) | 2000 | 100-1000 | |
| Nema 23(57x57) | 1500 | 100-1000 | |
| Nema 24(60x60) | 1500 | 100-1000 | |
| Nema 34(86x86) | 1500 | 100-1000 | |
Anhand des Motorkennliniendiagramms können Sie außerdem feststellen, ob der Motor Ihren Anforderungen an die Lastgeschwindigkeit entspricht.
3. Wie viel Drehmoment ist erforderlich, um die Last zu bewegen?
Die meisten Motoren haben Drehmomentwerte. Darauf müssen Sie achten, um zu entscheiden, ob der Motor die Kraft hat, das zu tun, was Sie wollen. Das Haltemoment eines Schrittmotors ähnelt der „Leistung“ eines herkömmlichen Motors. Der physikalische Aufbau von Schrittmotoren unterscheidet sich jedoch völlig von AC- und DC-Motoren und die Ausgangsleistung des Motors variiert je nach Drehzahl, Strom und Eingangsspannung.
Wenn das erforderliche Drehmoment weniger als 0,8 Nm beträgt, wählen Sie im Allgemeinen Nema 8 (20 x 20 mm), Nema 11 (28 x 28 mm), Nema 14 (35 x 35 mm), Nema 16 (39 x 39 mm), Nema 17 (42 x 42 mm); Wenn das Drehmoment etwa 1 Nm beträgt, wählen Sie einen Nema 23-Schrittmotor. Wenn das Drehmoment mehr als mehrere Nm beträgt, müssen Sie einen Schrittmotor mit Spezifikationen wie Nema 34 und Nema 42 wählen.
4. Welche Genauigkeit ist beim Positionieren einer Last erforderlich?
Die Genauigkeit von Schrittmotoren steigt, je kleiner die Schritte sind. Dies liegt daran, dass eine Revolution in sorgfältigere, zahlreichere Schritte unterteilt ist, die weniger Raum für Fehler lassen. Ein Schrittmotor mit einem Winkel von 0,9° liefert beispielsweise eine höhere Genauigkeit als ein Schrittmotor mit einem Winkel von 1,8°.
Ein weit verbreitetes Missverständnis ist, dass 1,8°-Motoren, die in Halbschritten laufen, die gleiche Genauigkeit erreichen wie 0,9°-Schrittmotoren, die in Vollschritten laufen. Ein weiteres Missverständnis besteht darin, dass bei Verwendung eines 0,9°-Schrittmotors Drehmoment verloren geht. Diese Annahmen sind falsch und ein Verständnis der mechanischen Konstruktionsmerkmale kann erklären, warum.
Im Allgemeinen eignen sich 0,9°-Schrittmotoren am besten für Anwendungen mit hoher Geschwindigkeit und hoher Präzision. Umgekehrt liefern 1,8°-Schrittmotoren ein höheres Drehmoment, aber eine geringere Genauigkeit. Ebenfalls erhältlich sind 0,9°-Schrittmotoren mit patentiertem 12-Pol-Design. Diese fortschrittlicheren Motoren kombinieren die Eigenschaften von 0,9°- und 1,8°-Motoren und bieten eine hohe Genauigkeit und ein höheres Drehmoment.
● Wählen Sie Schrittmotortreiber
Um das Beste aus Ihrem Schrittmotor herauszuholen, müssen Sie den entsprechenden Treiber verwenden. Bei der Auswahl eines Treibers sind drei Schlüsselelemente zu beachten: Spannung, Strom, Mikroschritt und Anzahl der Phasen. Jeder spielt eine wichtige Rolle für die Leistung des Motors. Die Nichtberücksichtigung dieser Parameter kann zu schlechter Leistung, lauteren Geräuschen oder sogar zu Motorüberhitzung und -ausfall führen, was zu Produktionszeitverlusten und erhöhten Wartungskosten führt.
1. Nennspannung
Das Überschreiten der maximalen Nennspannung des Motors oder der Betrieb mit einer höheren Versorgungsspannung kann zu Fehlfunktionen des Motors führen. Aus diesem Grund müssen Sie bei der Auswahl eines Schrittmotortreibers die maximale Nennspannung bzw. die typische Nennspannung des Motors aus der Produktbeschreibung oder der Drehmomentkurve kennen. Schrittmotoren werden normalerweise von Treibern angetrieben, die mit Wechselstrom (120V oder 240V) oder Niederspannungs-Gleichstrom (z. B. 24V, 36V oder 48V) betrieben werden. Wenn Sie einen Motor mit einer höheren Spannung als der angegebenen Spannung betreiben, z. B. einen Motor mit einer Nennspannung von 24VDC, kommt es schnell zu einer Überhitzung des Motors. Umgekehrt erzeugt ein Motor, der mit einer zu niedrigen Spannung betrieben wird (z. B. ein Hochspannungsmotor mit 24VDC), weniger Leistung und kann dazu führen, dass der Motor blockiert, wenn die Last nicht reduziert wird.
2. Aktuelle Bewertung
Stellen Sie sicher, dass der Treiber für einen großen Strombereich geeignet ist, damit Sie das System bei verschiedenen Spannungen testen können, die für Ihre Anwendung geeignet sind. Bei der Strombemessung sollten Sie sowohl den Dauer- bzw. Effektivstrom als auch den Spitzenstrombedarf berücksichtigen. Bei bürstenbehafteten und bürstenlosen Gleichstrommotoren ist die Gegen-EMK beim Anlauf und Stillstand nicht vorhanden und der Fahrer sieht nur den Wicklungswiderstand des Motors. Daher kommt es zu einem Stromstoß, bevor der Motor hochdreht und eine Gegen-EMK erzeugt, die der Versorgungsspannung entgegengesetzt ist, was den Stromverbrauch reduziert. Auch wenn Ihre Anwendung im Normalbetrieb nur maximal 1A Dauerstrom benötigt, muss sie beim Anfahren und Abwürgen möglicherweise das 2- bis 3-fache oder sogar mehr Dauerstrom verarbeiten.
3. Mikroschritt
Schrittmotoren bewegen sich in Schritten, die normalerweise 1,8° betragen, also 200 Schritte pro Umdrehung. Dies kann ein Problem sein, wenn wir kleine Bewegungen benötigen. Eine Möglichkeit wäre die Verwendung einer Art Getriebe, aber es gibt noch eine andere Möglichkeit – Mikroschritt. Mikroschritt bedeutet, dass wir mehr als 200 Schritte pro Umdrehung und damit kleinere Bewegungen ausführen können.
Beim Betrieb von Schrittmotoren mit Vollschritten sieht der Ausgang des Schrittmotortreibers wie ein Rechtecksignal aus und erzeugt grobe Bewegungen. Je größer die Mikroschritte sind, desto mehr ähnelt das Ausgangssignal einer Sinuswelle und der Schrittmotor bewegt sich gleichmäßiger. Allerdings hat dies auch einen Nachteil. Wenn der Mikroschrittwert zunimmt, sinkt das Drehmoment stark, und wenn der Wert zu groß ist, kann der Motor nicht genug Drehmoment erzeugen, um überhaupt zu drehen. Normalerweise können 1/4, 1/8 oder sogar 1/16 verwendet werden, um zufriedenstellend gleichmäßige Bewegungen zu erzielen und trotzdem genügend Drehmoment zu erzeugen.
4. Anzahl der Phasen
Schrittmotortreiber werden zur Steuerung einer bestimmten Anzahl von Phasen verwendet. Für typische unipolare und bipolare Schrittmotoren werden Zweiphasenantriebe verwendet, Motoren mit variabler Reluktanz verwenden jedoch Dreiphasenantriebe. Bevor Sie den Treiber auswählen, bestätigen Sie bitte die Phasennummer des Motors.
Wenn Sie einen Schrittmotor verwenden, benötigen Sie ein Netzteil, um den Schrittmotor mit Strom zu versorgen. Eine richtige Stromversorgung kann dafür sorgen, dass Ihr Schrittmotor mit optimaler Leistung läuft. Eine falsche Stromversorgung kann hingegen zu geringer Leistung oder größerer Energieverschwendung führen.
Nachfolgend finden Sie einige Tipps zur Auswahl des Netzteils::
| Motorgröße | Antriebsspannung |
| Nema 8 - Nema 17 | 12 - 24VDC |
| Nema 23, Nema 24 | 24 - 48VDC |
| Nema 34 | 48 - 100VDC/30 - 70VAC |
| Nema 42 - Nema 52 | 110 - 220VAC |
- Bestätigen Sie den Nennstrom des Motors. Sie finden es im Motordatenblatt.
- Fahrspannung bestätigen. Die Antriebsspannung ist der Hauptfaktor bei der Auswahl eines Netzteils. Normalerweise führt eine höhere Spannung zu einer besseren Leistung.
In der folgenden Tabelle sind die empfohlenen Spannungen für Schrittmotoren aufgeführt. Sie können die richtige Antriebsspannung für Ihre Anwendung auswählen.
Berechnen Sie den Leistungswert. Wir stellen Ihnen eine einfache Formel zur Verfügung:
P=n*I*V*1,2P: Leistungswert
n: Anzahl der Schrittmotoren
I: Motornennstrom
V: Antriebsspannung
1.2: bedeutet 20 % der Marge
zB. 3 Motoreinheiten mit jeweils 3A Nennstrom und einer Antriebsspannung von 36V, die geschätzte Leistung beträgt etwa: 3*3A*36V*1,2=388,8W. Sie können also einen 36-V-400-W-Stromversorger wählen
Bitte beachten Sie: Bei der Formel handelt es sich lediglich um einen Schätzwert der Leistung. Für unterschiedliche Arbeitsbedingungen ist eine unterschiedliche Leistung erforderlich. Beispielsweise arbeiten in einem 3-Achsen-System nicht alle 3 Motoren gleichzeitig und nicht alle 3 Motoren mit maximaler Last usw. In diesem Zustand kann der Leistungswert niedriger sein als der durch die Formel berechnete Wert.
● Vor- und Nachteile von Schrittmotoren
Vorteile von Schrittmotoren
- Schrittmotoren benötigen aufgrund ihres inneren Aufbaus keine Sensoren zur Erkennung der Motorposition. Da sich der Motor in „Schritten“ bewegt, kann durch einfaches Zählen dieser Schritte die Motorposition zu einem bestimmten Zeitpunkt ermittelt werden.
- Schrittmotoren sind zudem sehr einfach zu steuern. Obwohl der Motor einen Treiber benötigt, sind keine komplexen Berechnungen oder Einstellungen erforderlich, um ordnungsgemäß zu funktionieren. Generell ist der Arbeitsaufwand für die Regelung im Vergleich zu anderen Motoren geringer. Mit der Mikroschrittmethode erreichen Sie eine hohe Positioniergenauigkeit von bis zu etwa 0,007°.
- Schrittmotoren bieten ein großes Drehmoment bei geringerer Drehzahl, halten die Position hervorragend und haben eine lange Lebensdauer.
- Der Rotor des Schrittmotors hat eine große Masse und eine hohe Trägheit. Bei Hochgeschwindigkeitsbetrieb ist es anfällig für Vibrationen und Geräusche, was die Stabilität und Genauigkeit des Uhrwerks beeinträchtigt. Dies ist ein großer Nachteil von Schrittmotoren und es müssen Maßnahmen ergriffen werden, um diesen Effekt abzuschwächen oder zu beseitigen.
- Das Funktionsprinzip des Schrittmotors besteht darin, die Position und Geschwindigkeit durch kurzzeitige Momentanimpulssteuerung zu steuern. Bei längerem Betrieb kann es leicht zu einer Überhitzung oder gar einem Durchbrennen des Motors kommen. Für Anwendungen, die einen kontinuierlichen Betrieb über längere Zeiträume erfordern, sind Schrittmotoren möglicherweise nicht die beste Wahl.
● Verwendung und Anwendungen von Schrittmotoren
Aufgrund der Eigenschaften von Schrittmotoren werden sie in vielen Anwendungen eingesetzt, die eine einfache Positionskontrolle und die Fähigkeit, die Position beizubehalten, erfordern, einschließlich:
1. 3D-Drucker
Der Schrittmotor ist eine der wichtigen Komponenten des 3D-Druckers. Je nach Druckertyp können sie für vielfältige Anwendungen eingesetzt werden. Schrittmotoren werden beispielsweise verwendet, um einen Extruder oder eine Bauplattform individuell entlang der X-, Y- und Z-Achse zu bewegen. Normalerweise ist die Extruderbaugruppe mit einem Schrittmotor ausgestattet, der das Filament in den Extruder zieht.
Schrittmotoren sind insofern einzigartig, als sie sich in einem bekannten Intervall bewegen und dann in dieser Position bleiben können. Da sie Objekte wiederholt an eine feste Position bewegen können, werden sie häufig in Robotern und Druckern eingesetzt.
Schrittmotoren gibt es in vielen Größen. Die am häufigsten verwendeten Größen in 3D-Druckern sind NEMA 14, NEMA 17, NEMA 23 und NEMA 24.
2. CNC-Maschinen
Schrittmotoren sind eine Alternative zu Servomotoren und können die meisten Arten von CNC-Maschinen mit Strom versorgen. CNC-Anwendungen umfassen ein breites Spektrum an Fertigungsprozessen, bei denen vorprogrammierte Computersoftware den Betrieb und die physische Bewegung von Werkzeugmaschinen in Fabrik- und Fertigungsumgebungen steuert.Während Schrittmotoren in CNC-Anwendungen oft als eine „wirtschaftlichere“ Alternative zu Servomotoren angesehen werden, handelt es sich hierbei um eine zu starke Vereinfachung, die auf veraltetem technologischem Wissen basiert und heute nicht immer ganz genau ist. Schrittmotoren sind bei gleicher Leistung tendenziell günstiger als Servomotoren, moderne Versionen sind jedoch ebenso vielseitig einsetzbar. Infolgedessen finden Schrittmotoren eine breitere Anwendung und sind in einer breiteren Palette von Maschinen und Systemen vorhanden, von Werkzeugmaschinen über Desktop-Computer bis hin zu Automobilen.
CNC-Schrittmotoren haben gegenüber Servomotoren den entscheidenden Vorteil, dass sie keine Encoder benötigen. Servomotoren sind von Natur aus schwieriger zu verstehen und zu bedienen als Schrittmotoren, teilweise weil sie über Encoder verfügen, die anfälliger für Ausfälle sind als viele andere Komponenten zuverlässiger Servomotoren. Schrittmotoren benötigen keine Encoder, wodurch sie theoretisch zuverlässiger sind als Servomotoren.
Außerdem sind Schrittmotoren (im Gegensatz zu Servomotoren) auch bürstenlos, was bedeutet, dass sie nicht regelmäßig ausgetauscht werden müssen, solange die Lager in gutem Betriebszustand sind.
3. Kameraobjektive
Schrittmotoren werden häufig in verschiedenen Anwendungen der High-End-Kameratechnologie eingesetzt. Mit ihnen lassen sich äußerst präzise interne Strukturen wie die automatische Fokussierung und Blendeneinstellungen innerhalb des Objektivs steuern. Darüber hinaus finden Schrittmotoren Anwendung im Gehäuse und in externen mechanischen Strukturen von Sicherheitskameras und Fernüberwachungssystemen.
Insbesondere Schrittmotoren ermöglichen zusammen mit elektrischen Kameraschlitten einen sehr reibungslosen Betrieb von Kamerapositionierungsgeräten. Dies bedeutet, dass von Sicherheitsvorrichtungen erfasste Objektive zuverlässig gehalten werden können, wodurch potenzielle Bildverzerrungsprobleme vermieden werden, die durch physische Bewegungen der Kamera in ihrem Sichtfeld verursacht werden. Schrittmotoren bieten mehrere attraktive Funktionen für Kamera- und Videoüberwachungspositionierungssysteme, darunter volles Drehmoment im stationären Zustand, äußerst präzise und sofortige Reaktionszeiten für alle Bewegungseingaben, konsistente Wiederholbarkeit vorprogrammierter Bewegungen und einfache Steuerung mit offenem Regelkreis basierend auf festen Schrittgrößen .
Darüber hinaus werden Schrittmotoren auch in Sicherheits-, Servicerobotern, Druckern, Scannern, Textilmaschinen, Verpackungsmaschinen, CD-Laufwerken und intelligenten Beleuchtungen usw. eingesetzt.