







































































 Leitung 10,16mm(0,4\") mit Sensor")
 Leitung 5,08mm(0,2\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 8mm(0,314961\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 2.54mm(0.1\") mit Sensor")
 Leitung 4mm(0,15748\") mit Sensor")
 Leitung 2mm(0,07874\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 10,16mm(0,4\") mit Sensor")
 Leitung 5,08mm(0,2\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
 Nema 23 Schrittmotor und Treiber")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
 Nema 34 Schrittmotor und Treiber")
 Nema 23 Schrittmotor und Treiber")
 Nema 34 Schrittmotor und Treiber")
 Nema 34 Schrittmotor und Treiber")
 Nema 34 Schrittmotore & Schrittmotortreiber & 60V Netzteil")















Schrittmotoren und Servomotoren sind beide wichtige Steuerungskomponenten in der industriellen Antriebssteuerung und werden in einer Vielzahl von Anwendungen eingesetzt. Viele Kunden kennen jedoch nicht die Hauptunterschiede zwischen diesen beiden Motortypen und sind sich daher nicht sicher, wie sie sich entscheiden sollen. Was sind also die Hauptunterschiede zwischen Schrittmotoren und Servomotoren? Im Folgenden finden Sie eine kurze Beschreibung der Unterschiede.
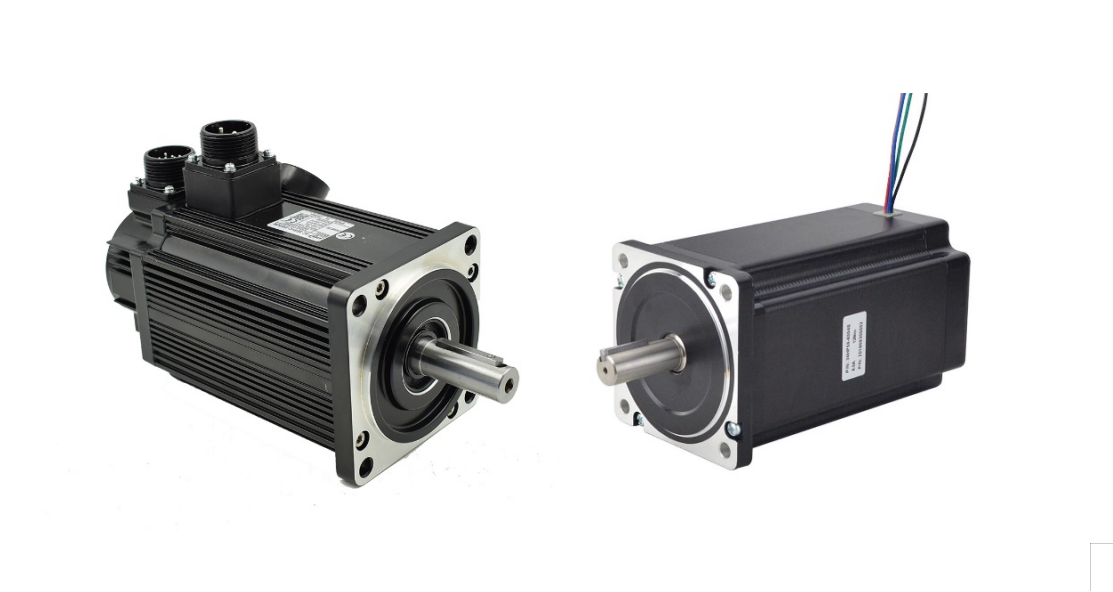
1.Prinzip der Funktionsweise
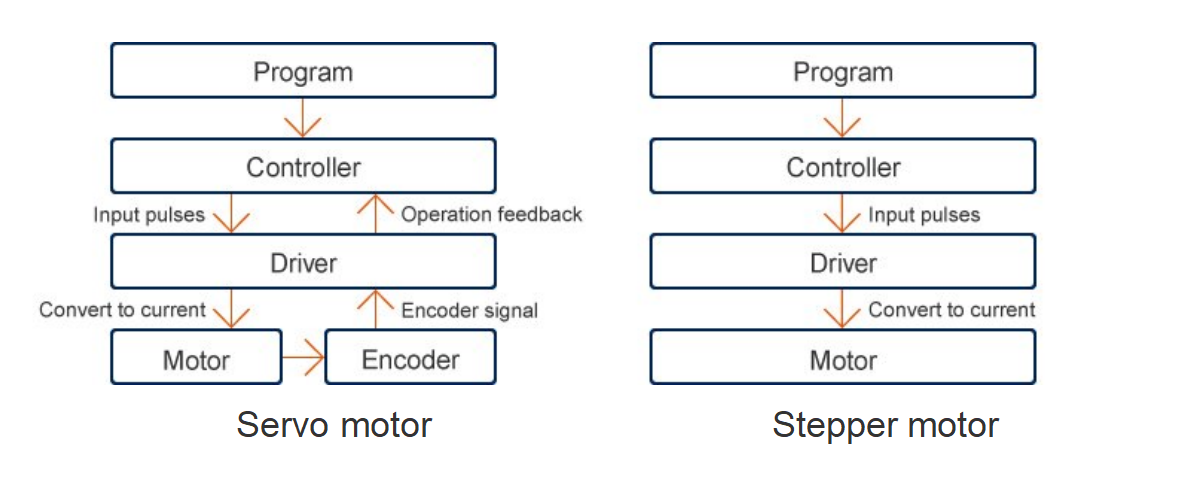
Diese beiden Motortypen unterscheiden sich stark in ihrem Funktionsprinzip. Schrittmotoren sind Steuerungselemente mit offenem Regelkreis, die elektrische Impulssignale in Winkel- oder Linearverschiebungen umwandeln.
Der Servomotor arbeitet hauptsächlich mit Impulsen zur Positionierung. Der Servomotor selbst hat die Funktion, Impulse auszusenden. Für jeden Drehwinkel des Servomotors wird eine entsprechende Anzahl von Impulsen gesendet, die mit den vom Servomotor empfangenen Impulsen einen geschlossenen Kreislauf bilden, so dass das System genau weiß, wie viele Impulse gesendet und empfangen wurden, was eine präzise Steuerung der Motordrehung und eine genaue Positionierung ermöglicht.
2.Drehgeschwindigkeit und Überlastfähigkeit
Schrittmotoren neigen bei niedrigen Drehzahlen zu niederfrequenten Schwingungen. Wenn Schrittmotoren bei niedrigen Drehzahlen arbeiten, ist daher in der Regel eine Dämpfungstechnologie erforderlich, um das Phänomen der niederfrequenten Schwingungen zu überwinden, z. B. durch den Einbau von Dämpfern in den Motor oder die Verwendung von Unterteilungstechnologie im Treiber. Servomotoren leiden nicht unter diesem Phänomen, und ihre Regelungseigenschaften sorgen dafür, dass sie auch bei hohen Geschwindigkeiten eine hervorragende Leistung erbringen. Die Moment-Frequenz-Charakteristiken der beiden sind unterschiedlich, und im Allgemeinen ist die Nenndrehzahl eines Servomotors höher als die eines Schrittmotors. Das Ausgangsdrehmoment des Schrittmotors sinkt mit steigender Drehzahl, während der Servomotor ein konstantes Drehmoment abgibt, so dass der Schrittmotor im Allgemeinen keine Überlastfähigkeit aufweist, während der AC-Servomotor eine höhere Überlastfähigkeit besitzt.
Zusammenfassung:
Drehzahl und Drehmoment des Schrittmotors:
- a. Der Schrittmotor hat eine geringere Drehzahl als ein Servomotor, der normale Schrittmotor hat eine maximale Drehzahl von 1500 UPM.
- b. Wenn die Motordrehzahl steigt, sinkt das Drehmoment des Motors.
- c. Er bietet ein ausgezeichnetes Drehmoment bei Anwendungen mit niedriger Drehzahl.
- d. Der Schrittmotor ist für Anwendungen mit Drehmomentsteuerung nicht geeignet.
Geschwindigkeit und Drehmoment eines Servomotors:
- a. Der Servomotor hat eine höhere Drehzahl als der Schrittmotor, allerdings sind auf dem Markt verschiedene Drehzahlen bis zu 5000 UPM erhältlich.
- b. Wir erhalten ein hohes Drehmoment bei einer höheren Drehzahl.
- c. Er bietet ein ausgezeichnetes Drehmoment bei Hochgeschwindigkeitsanwendungen.
- d. Der Servomotor kann in Anwendungen zur Drehmomentsteuerung eingesetzt werden. (Bsp. Werkzeug zum Anziehen von Muttern).
3.Betriebsleistung
Schrittmotoren werden im Allgemeinen über einen offenen Regelkreis gesteuert. Bei einer zu hohen Startfrequenz oder einer zu großen Last kann es zu Schrittverlusten oder Blockierungen kommen. Wenn Sie diese Motoren verwenden, müssen Sie sich um Geschwindigkeitsprobleme kümmern oder Encoder für einen geschlossenen Regelkreis hinzufügen. Der Servomotor ist zwar ein geschlossener Regelkreis, lässt sich aber leichter steuern und leidet nicht unter Schrittverlusten.
4.Kosten
Der Schrittmotor ist in Bezug auf die günstigen Kosten im Vorteil. Um die gleiche Funktion zu erreichen, ist der Preis eines Servomotors höher als der eines Schrittmotors mit der gleichen Leistung. Die hohe Reaktionsfähigkeit, die hohe Geschwindigkeit und die hohe Genauigkeit von Servomotoren bedeuten zwangsläufig, dass sie teurer sind.
5.Wählen Sie den idealen Motor
Im Allgemeinen wird davon ausgegangen, dass Servosteuerungen bei Anwendungen, die Geschwindigkeiten von mehr als 800 UPM erfordern und bei denen eine hohe Dynamik erforderlich ist, besser funktionieren. Schrittmotoren eignen sich besser für Anwendungen, die niedrigere Drehzahlen, geringe bis mittlere Beschleunigung und ein höheres Haltemoment erfordern.
Sowohl Servo- als auch Schrittmotoren haben ihre eigenen Merkmale, und es besteht die Möglichkeit, dass sie sich in ihren Anwendungen gegenseitig durchdringen. Mit den Fortschritten in der Präzisionsfertigung und der Antriebssteuerungstechnologie wird auch die Schrittmotortechnologie verbessert, und die Schrittmotoren nehmen nach wie vor eine wichtige Stellung in der Industrie ein.
Welche Tipps gibt es bei der Auswahl eines Servomotors oder Schrittmotors?
A. Wählen Sie den Servomotor, wenn Ihre Anforderungen wie folgt sind,
- a. Wenn Sie eine Positionsrückmeldung wünschen.
- b. Für Hochgeschwindigkeitsanwendungen.
- c. Anwendungen mit Drehzahlregelung.
- d. Anwendungen zur Drehmomentregelung.
- e. Für komplexe Maschinensysteme.
- f. Für präzisere und schnellere Geräte.
B. Wählen Sie den Schrittmotor aus, wenn Ihre Anforderungen wie folgt sind:
- a. Ihre Anwendung braucht keine Positionsrückmeldung.
- b. Für Anwendungen mit niedriger Drehzahl.
- c. Sie können den Schrittmotor nur für Anwendungen mit Positionssteuerung verwenden.
- d. Für einfache Maschinenanwendungen.
- e. Wenn Ihre Anwendung ein Haltemoment erfordert.
6.Industrielle Anwendungen von Servo- und Schrittmotoren
a.Typische Anwendung von Servomotoren:
- Roboter
- Verpackungsmaschinen
- Kamera-Autofokus
- CNC-Maschinen
- Schneidemaschinen
- Scher- und Umformmaschinen
- Proportionale Ventilsteuerung
- Druckmaschinen
b.Typische Anwendungen von Schrittmotoren:
- Kostengünstige CNC-Maschinen
- Bewegung von Kugelumlaufspindeln (Spritzlackier- oder Papierschneidemaschinen)
- Präzise Auf-/Abbewegung (Schweißmaschine)
- 3D-Drucker
- Kleine Roboter
- Textilmaschinen
- Medizinische Ausrüstungen
7.Servomotor vs. Schrittmotor (in Tabelle)
| # | Spezifikationen | Servomotor | Schrittmotor |
| 01 | Funktion des Systems | Geschlossener Regelkreis-System (Positionsrückmeldung oder Encoder vorhanden) | Offenes Regelkreis-System (keine Positionsrückmeldung oder Encoder) |
| 02 | Kosten | Sehr teuer | Kostengünstig |
| 03 | Drehzahl | Hohe Drehzahl (maximal 5000 UPM) | Niedrige Drehzahl (maximal 1500 UPM) |
| 04 | Drehmoment-/Drehzahlregelung odf | Drehmoment- oder Drehzahlregelungsmodus | Kein Drehmoment- oder Drehzahlregelungsmodus |
| 05 | Eingangsspannung | Verwendung von Wechselstrom | Verwendung von Gleichstrom |
| 06 | Drehmoment | Hohes Drehmoment bei hoher Drehzahl | Hohes Drehmoment bei niedriger Drehzahl |
| 07 | Bedarf | Abstimmung erforderlich | Keine Abstimmung erforderlich |
| 08 | Stromverbrauch | Mehr Strom verbrauchen | Weniger Strom verbrauchen |
| 09 | Funktion | Komplex für die Inbetriebnahme | Einfach und leichter für die Inbetriebnahme |
| 10 | Größe | 50W bis 15KW Motorgröße verfügbar | Maximal 750W Motorgröße verfügbar |
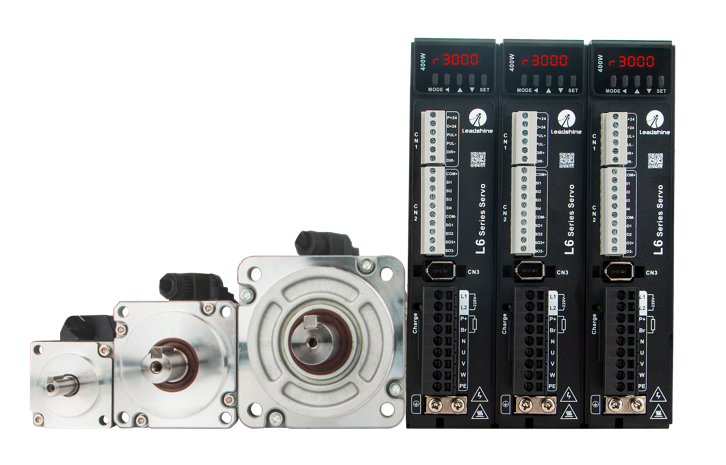
STEPPERONLINE bietet derzeit eine Reihe von integrierten Easy-Servomotoren an. Als unser Servomotor der ersten Generation ist er im Plug-and-Play-Betrieb deutlich überlegen. Im Gegensatz zum Standard-Servomotor verfügt der integrierte einfache Servomotor bereits über einen eingebauten Treiber.
Wir werden unsere nächste Generation von Servomotoren bis Ende 2021 einführen.