Ołów 10,16mm (0,4\") z czujnikiem")
 Ołów 5,08mm (0,2\") z czujnikiem")
 Ołów 2,54mm (0,1\") z czujnikiem")
 Ołów 12,7mm (0,5\") z czujnikiem")
 Ołów 8mm (0,314961\") z czujnikiem")
 Ołów 12,7mm (0,5\") z czujnikiem")
 Ołów 6,35mm (0,25\") z czujnikiem")
 Ołów 6,35mm (0,25\") z czujnikiem")
 Ołów 2,54mm (0,1\") z czujnikiem")
 Ołów 2.54mm(0.1\") z czujnikiem")
 Ołów 4mm (0,15748\") z czujnikiem")
 Ołów 2mm (0,07874\") z czujnikiem")
 Ołów 12,7mm (0,5\") z czujnikiem")
 Ołów 6,35mm (0,25\") z czujnikiem")
 Ołów 2,54mm (0,1\") z czujnikiem")
 Ołów 10,16mm (0,4\") z czujnikiem")
 Ołów 5,08mm (0,2\") z czujnikiem")
 Ołów 2,54mm (0,1\") z czujnikiem")














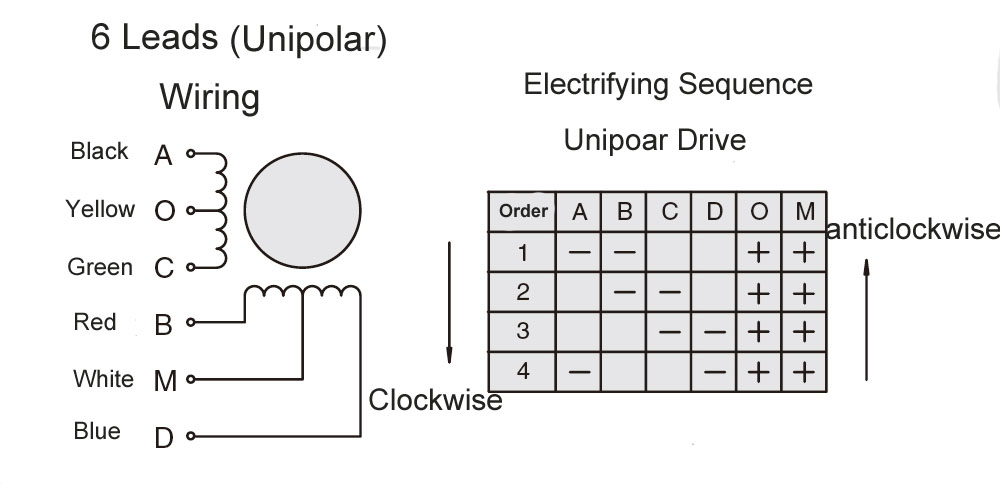
Napęd unipolarny: różne uzwojenia silnika są wzbudzane sekwencyjnie według określonego schematu, ale kierunek prądu każdego uzwojenia jest zawsze taki sam, co nazywa się napędem unipolarnym.
Jednobiegunowy obwód napędowy wykorzystuje cztery tranzystory do sterowania dwiema fazami silnika krokowego. Struktura uzwojenia stojana silnika składa się z dwóch zestawów cewek z centralnym zaczepem, jak pokazano na rysunku 1. Cały silnik ma sześć przewodów podłączonych do świata zewnętrznego. Strona prądu przemiennego nie może być zasilana w tym samym czasie (to samo dotyczy strony BD), w przeciwnym razie strumień magnetyczny generowany przez dwie cewki na biegunie magnetycznym zniesie się nawzajem, powodując jedynie utratę miedzi w cewce. Ponieważ w rzeczywistości ma tylko dwie fazy (uzwojenie AC jest jednofazowe, a uzwojenie BD jest jednofazowe), prawidłowym oznaczeniem powinien być dwufazowy sześcioprzewodowy silnik krokowy.
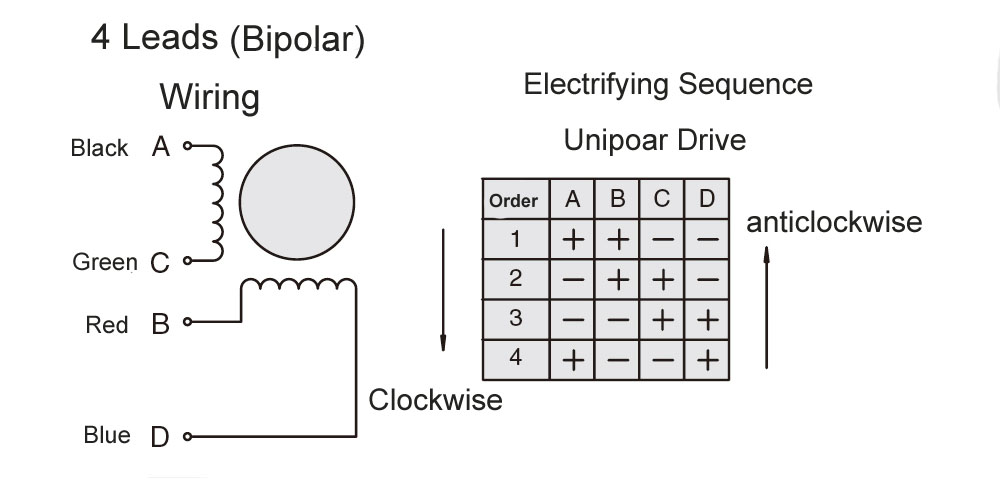
Obwód sterujący bipolarnego silnika krokowego pokazano na rysunku 2, który wykorzystuje osiem tranzystorów do sterowania dwoma zestawami faz. Bieguny magnetyczne stojana nawinięte są pojedynczą cewką, a kierunek bieguna magnetycznego zmienia się poprzez zmianę kierunku prądu cewek AC i BD. Na wczesnym etapie rozwoju silników krokowych silniki jednobiegunowe zyskały pewien zakres zastosowań ze względu na koszt elementów półprzewodnikowych, ponieważ wymagają mniej tranzystorów w obwodzie sterującym. Jednak wraz z szybkim rozwojem materiałów półprzewodnikowych w latach pięćdziesiątych i sześćdziesiątych XX wieku koszt tranzystorów znacznie spadł, a silniki bipolarne odnotowały gwałtowny wzrost wykorzystania ze względu na ich zalety wydajnościowe.
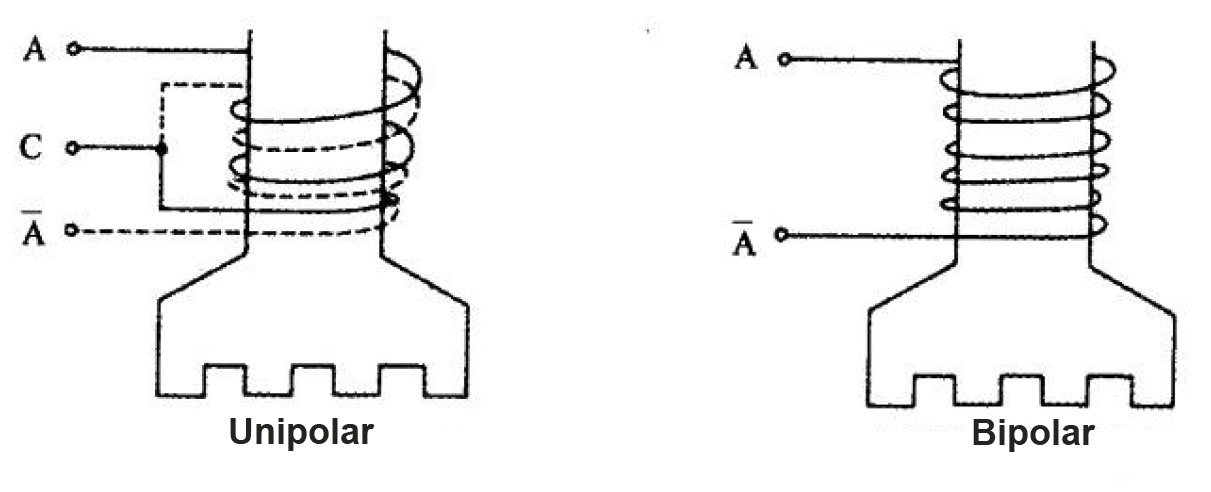
Rysunek 3 pokazuje dwie metody nawijania: unipolarną i bipolarną. Gdy średnica drutu jest taka sama, liczba zwojów uzwojenia cewki w metodzie unipolarnej wynosi N, rezystancja R, a liczba zwojów uzwojenia cewki w metodzie bipolarnej wynosi 2N. , rezystancja cewki wynosi 2R.
Poniższa tabela porównuje wydajność napędu unipolarnego i bipolarnego w obwodzie napędu stałego napięcia przy niskich prędkościach. Iloczyn prądu i zwojów cewki nazywany jest amperoobrotem, który jest proporcjonalny do momentu obrotowego. Jeśli oba mają tę samą prędkość, moc wyjściowa jest proporcjonalna do amperozwojów. Podobnie, prąd dwubiegunowy to V/2R, a liczba zwojów również wynosi 2N, a iloczyn jest taki sam jak prąd jednobiegunowy, czyli VN/R. W przypadku wejściowego napędu stałonapięciowego porównanie unipolarnego i bipolarnego przedstawiono w poniższej tabeli. Prąd jest tylko w połowie prądem jednobiegunowym, a wydajność przy niskich prędkościach jest dwukrotnie większa niż w przypadku prądu jednobiegunowego.
Dlatego, gdy istnieje zapotrzebowanie na wysoki moment obrotowy w zastosowaniach o małych lub niskich prędkościach, należy zastosować silnik bipolarny i sterownik. W aplikacjach o dużej prędkości liczba zwojów silnika bipolarnego wzrasta, indukcyjność staje się większa, a tylna siła elektromotoryczna wzrasta, co zmniejsza prąd, a tym samym zmniejsza moment obrotowy. Dlatego należy zwrócić uwagę na porównanie momentu obrotowego z momentem silnika jednobiegunowego.
| Jednobiegunowy | Dwubiegunowy | |
| Zwroty amperów | U1=V*N/R | U2=V*2N/2R=V*N/R |
| Moc wejściowa | W1=V²/R | W2=(V/2R)²*2R=V²/2R |
| Efektywność | η=U1/W1=N/V | η=U2/W2=2N/V |
Uwaga: V to przyłożone napięcie; R to rezystancja cewki silnika; N to liczba zwojów jednobiegunowych
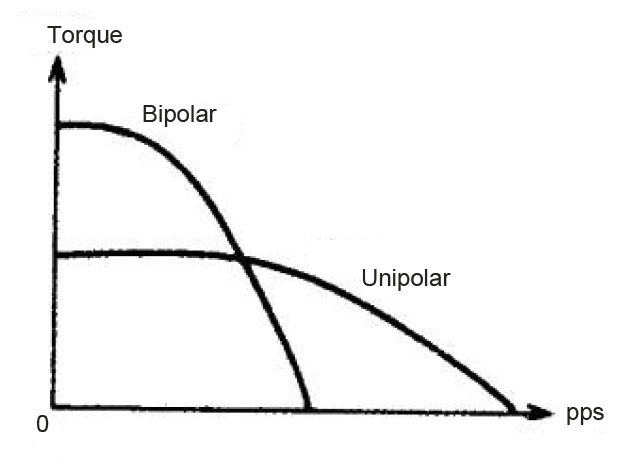
Rysunek 4 przedstawia krzywe charakterystyczne jednobiegunowego silnika krokowego i dwubiegunowego silnika krokowego, z których oba przyjmują ten sam tryb stałego prądu. Ogólnie rzecz biorąc, aplikacje z niskimi prędkościami i dużymi momentami obrotowymi wykorzystują napędy bipolarne, podczas gdy aplikacje z dużymi prędkościami wykorzystują napędy unipolarne.