
























































































Veuillez suivre les étapes ci-dessous pour connecter le pilote stepper à Arduino:
1. Connectez les pilotes DIR+ et PUL+ au port numérique d’arduino. Par exemple: PIN8 et PIN9.
2. Connectez PUL- et DIR- au GND d’arduino.
3. Écrivez le programme sur votre ordinateur en pointant PIN8 et PIN9 vers DIR et PUL.
4. Télécharger le programme sur Arduino, et la puissance Arduino par l’alimentation 5V.
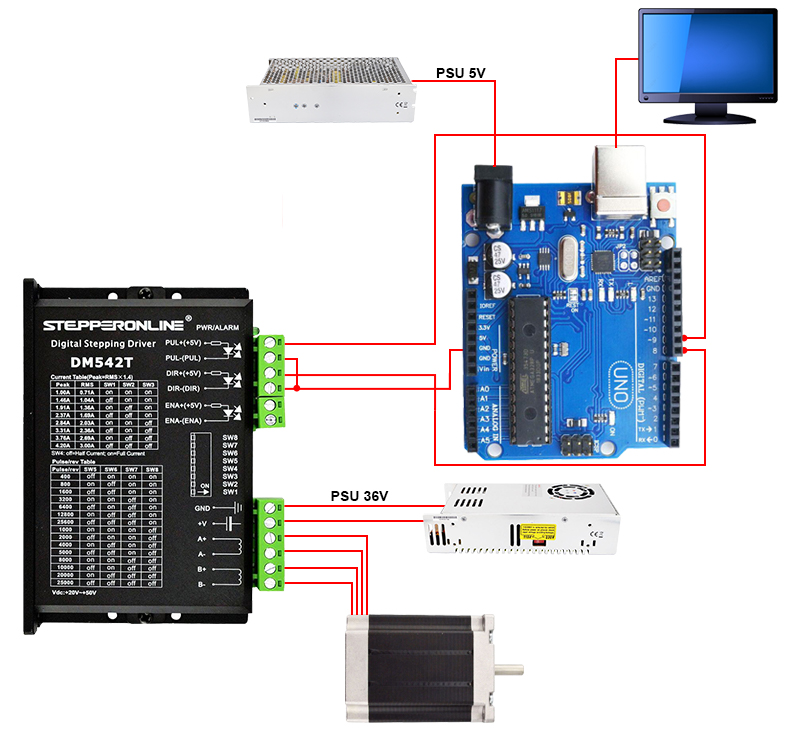
Ci-dessous diagramme schématique montre la connexion de base d’arduino, pilote pas à pas, alimentation et moteur pas à pas.
We also provide a simple demo code
int x;
void setup()
{
pinMode(9,OUTPUT); // set Pin9 as PUL
pinMode(8,OUTPUT); // set Pin8 as DIR
}
void loop()
{
digitalWrite(8,HIGH); // set high level direction
for(x = 0; x < 400; x++) // repeat 400 times a revolution when setting 400 on driver
{
digitalWrite(9,HIGH); // Output high
delayMicroseconds(500); // set rotate speed
digitalWrite(9,LOW); // Output low
delayMicroseconds(500); // set rotate speed
}
delay(1000); //pause 1 second
digitalWrite(8,LOW); // set high level direction
for(x = 0; x < 400; x++)
{
digitalWrite(9,HIGH);
delayMicroseconds(500);
digitalWrite(9,LOW);
delayMicroseconds(500);
}
delay(1000);
}
