



















































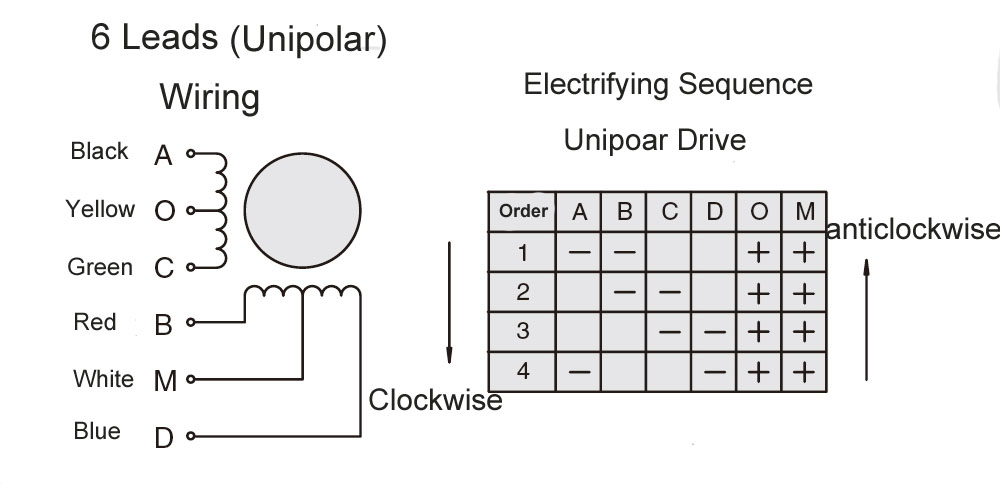
Azionamento unipolare: i diversi avvolgimenti del motore vengono eccitati in sequenza secondo un certo schema, ma la direzione della corrente di ciascun avvolgimento è sempre la stessa, che viene chiamata azionamento unipolare.
Un circuito di azionamento unipolare utilizza quattro transistor per controllare le due fasi di un motore passo-passo. La struttura di avvolgimento dello statore del motore è costituita da due serie di bobine con una presa centrale, come mostrato nella Figura 1. L'intero motore ha sei fili collegati al mondo esterno. Il lato AC non può essere eccitato contemporaneamente (lo stesso vale per il lato BD), altrimenti il flusso magnetico generato dalle due bobine al polo magnetico si annullerà a vicenda, determinando solo la perdita di rame della bobina. Poiché in realtà ha solo due fasi (l'avvolgimento CA è monofase e l'avvolgimento BD è monofase), la designazione corretta dovrebbe essere un motore passo-passo a sei fili bifase.
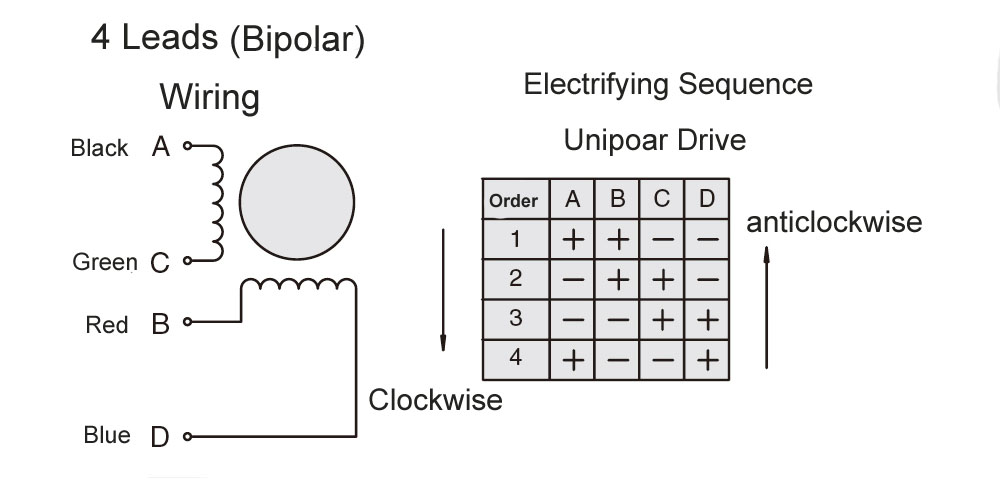
Il circuito di pilotaggio di un motore passo-passo bipolare è mostrato nella Figura 2, che utilizza otto transistor per pilotare due serie di fasi. I poli magnetici dello statore sono avvolti con una singola bobina e la direzione del polo magnetico viene cambiata cambiando la direzione corrente delle bobine AC e BD. Nel primo sviluppo dei motori passo-passo, i motori unipolari hanno guadagnato una certa gamma di applicazioni a causa del costo dei componenti semiconduttori, poiché richiedono meno transistor nel circuito di controllo. Tuttavia, con il rapido sviluppo dei materiali semiconduttori negli anni '50 e '60, il costo dei transistor si è notevolmente ridotto e i motori bipolari hanno visto un forte aumento dell'utilizzo grazie ai loro vantaggi in termini di prestazioni.
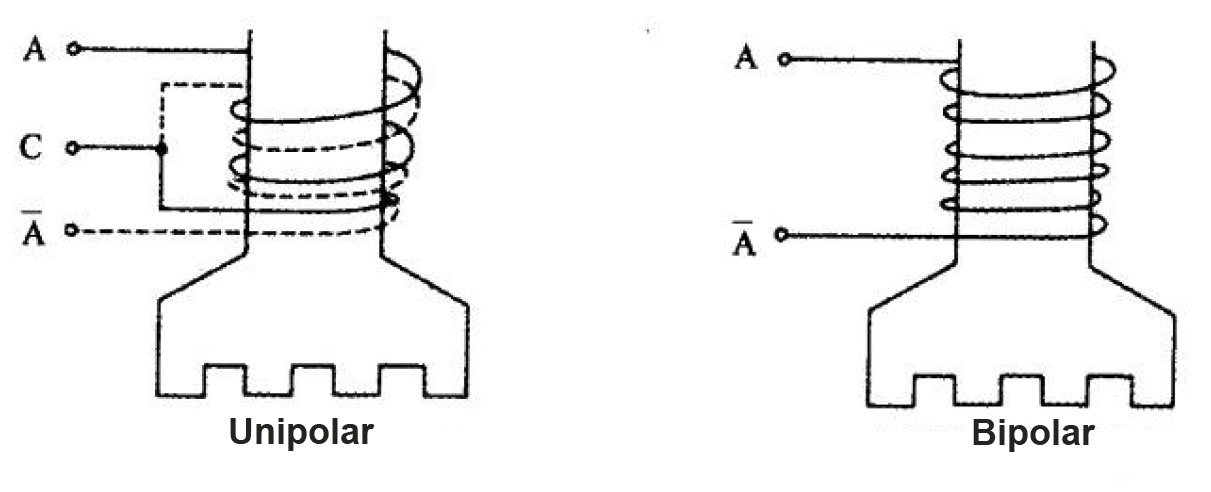
La Figura 3 mostra due metodi di avvolgimento unipolare e bipolare. Quando il diametro del filo è lo stesso, il numero di spire dell'avvolgimento della bobina nel metodo unipolare è N, la resistenza è R e il numero di spire dell'avvolgimento della bobina nel metodo bipolare è 2N. , la resistenza della bobina è 2R.
La tabella seguente confronta l'efficienza dell'azionamento unipolare e bipolare in un circuito di azionamento a tensione costante a basse velocità. Il prodotto della corrente e dei giri della bobina è chiamato ampere-giri, che è proporzionale alla coppia. Se i due hanno la stessa velocità, la potenza in uscita è proporzionale all'ampere-giro. Allo stesso modo, la corrente bipolare è V/2R, e anche il numero di spire è 2N, e il prodotto è uguale a quello dell'unipolare, che è VN/R. Nel caso di pilotaggio a tensione costante in ingresso, il confronto tra unipolare e bipolare è riportato nella tabella sottostante. La corrente è solo la metà di unipolare e l'efficienza a basse velocità è doppia rispetto a unipolare.
Pertanto, quando è richiesta una coppia elevata in applicazioni piccole o a bassa velocità, è necessario utilizzare un motore e un driver bipolari. Nelle applicazioni ad alta velocità, il numero di giri del motore bipolare aumenta, l'induttanza aumenta e la forza controelettromotrice aumenta, il che riduce la corrente e quindi la coppia. Pertanto, occorre prestare attenzione al confronto della coppia con quella di un motore unipolare.
| Unipolar | Bipolar | |
| Ampere Tturns | U1=V*N/R | U2=V*2N/2R=V*N/R |
| Input Power | W1=V²/R | W2=(V/2R)²*2R=V²/2R |
| Efficiency | η=U1/W1=N/V | η=U2/W2=2N/V |
Nota: V è la tensione applicata; R è la resistenza della bobina del motore; N è il numero di giri unipolari
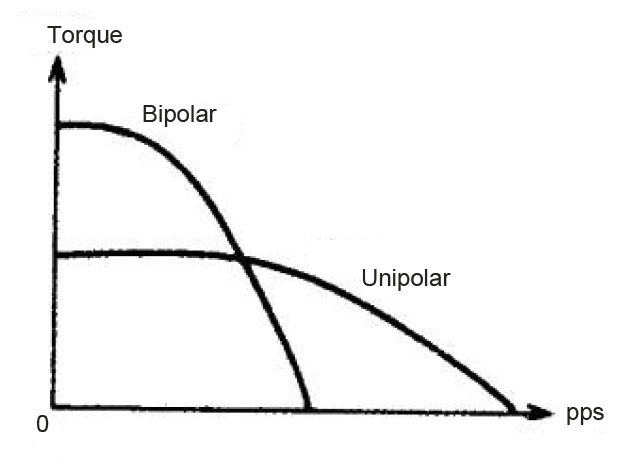
La Figura 4 mostra le curve caratteristiche del motore passo-passo unipolare e del motore passo-passo bipolare, entrambi adottano la stessa modalità di guida a corrente costante. In genere, le applicazioni con carico a bassa velocità e coppia elevata utilizzano azionamenti bipolari, mentre le applicazioni con azionamenti ad alta velocità utilizzano azionamenti unipolari.
 0,3A 42x42x34 mm 6 fili")
 0.3A 42x42x34mm 6 Fili")
 0,4A 42x42x39mm 6 fili")
 0,8A 42x42x40mm 6 fili")
 0,4A 42x42x48mm 6 fili")
 3A 57x57x56mm 8 Fili")
 4A 57x57x84mm 8 fili")
 4A 57x57x84mm 8 Fili")
 60x60x100 mm 8 fili")