























































































Un articolo ti consente di sapere tutto sui motori passo-passo
Clicca direttamente sul capitolo che ti interessa.
Cos'è un motore passo-passo?
Un motore passo-passo è un motore CC sincrono senza spazzole che converte gli impulsi digitali nella rotazione di un asse meccanico. A differenza di molti altri tipi di motori standard, un motore passo-passo non gira continuamente per un numero qualsiasi di giri fino a quando la tensione CC fornita ad esso non viene interrotta. Presenta diverse bobine organizzate in gruppi, le cosiddette "fasi". Se ciascuna fase viene accesa a turno, il motore ruota passo dopo passo.
I motori passo-passo dividono l'intero movimento rotatorio in più passi uguali. Purché il motore sia adeguatamente dimensionato per la coppia e la velocità dell'applicazione, la posizione del motore può essere controllata per spostarsi in uno di questi passaggi e rimanere lì senza alcun feedback da parte di un sensore di posizione.
Inoltre, un motore passo-passo è un dispositivo di ingresso e uscita digitale. È particolarmente adatto per applicazioni in cui il segnale di controllo è sotto forma di impulsi digitali e non sotto forma di tensioni analogiche. Un impulso digitale inviato al driver di un motore passo-passo fa sì che il motore aumenti un certo angolo di movimento. All'aumentare della frequenza degli impulsi digitali, il movimento del passo diventa una rotazione continua.
Con lo stepping controllato dal computer è possibile ottenere un posizionamento e/o un controllo della velocità molto precisi. Di conseguenza, i motori passo-passo sono diventati il motore preferito per molte applicazioni di controllo del movimento di precisione.
Come funziona il motore passo-passo?
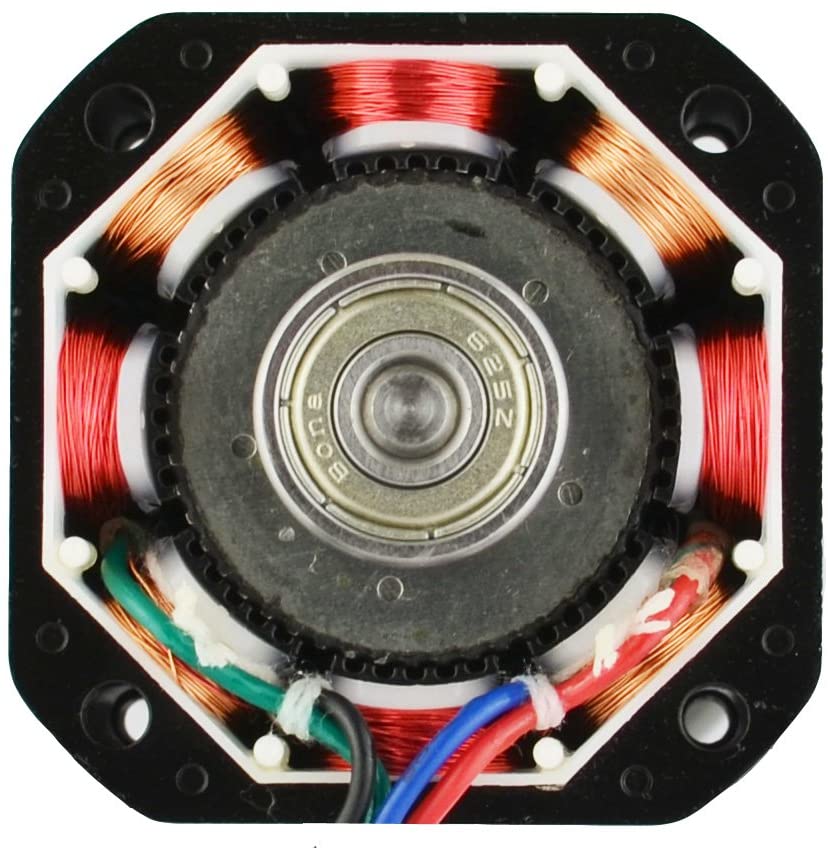
Quando la corrente scorre attraverso l'avvolgimento dello statore, l'avvolgimento dello statore genera un campo magnetico vettoriale. Questo campo magnetico farà ruotare il rotore ad un certo angolo in modo che la direzione del campo magnetico del rotore sia coerente con la direzione del campo magnetico dello statore. Quando il campo magnetico vettoriale dello statore ruota di un angolo. Anche il rotore ruota ad angolo rispetto a questo campo magnetico. Ogni volta che viene immesso un impulso elettrico, il motore ruota di un angolo e avanza di un passo. Il suo spostamento angolare in uscita è proporzionale al numero di impulsi in ingresso e la sua velocità di rotazione è proporzionale alla frequenza degli impulsi. Cambiare l'ordine in cui gli avvolgimenti vengono energizzati e il motore invertirà la direzione. Pertanto, la rotazione del motore passo-passo può essere controllata controllando il numero di impulsi, la frequenza e la sequenza di energizzazione di ciascuna fase dell'avvolgimento del motore.
I tipi comuni di motori hanno nuclei di ferro e bobine di avvolgimento all'interno. L'avvolgimento ha resistenza e causerà perdite quando viene applicata l'elettricità. L'entità della perdita è proporzionale alla resistenza e al quadrato della corrente. Questo è ciò che spesso chiamiamo perdita di rame. Se la corrente non è un'onda CC standard o sinusoidale, si verificherà anche una perdita armonica; il nucleo di ferro avrà isteresi. L'effetto delle correnti parassite produce anche perdite nel campo magnetico alternato e la sua dimensione è correlata al materiale, alla corrente, alla frequenza e alla tensione. Questa è chiamata perdita di ferro.
Le perdite sia nel rame che nel ferro si manifestano sotto forma di calore, influenzando l'efficienza del motore. I motori passo-passo generalmente perseguono la precisione di posizionamento e la coppia erogata e la loro efficienza è relativamente bassa. La corrente è generalmente maggiore e ha un contenuto armonico più elevato. Anche la frequenza dell'alternanza di corrente cambia con il cambiamento della velocità di rotazione. Pertanto, è normale che i motori passo-passo si surriscaldino, più del normale.
Il motore converte l'energia elettrica in energia meccanica e il motore passo-passo è un elemento di controllo ad anello aperto che converte i segnali di impulso elettrico in spostamento angolare o spostamento lineare. In condizioni di assenza di sovraccarico, la velocità del motore e la posizione di arresto dipendono solo dalla frequenza e dal numero di impulsi del segnale a impulsi e non sono influenzati dalle variazioni di carico. In altre parole, se al motore viene aggiunto un segnale a impulsi, il motore ruoterà di un angolo di passo. L'esistenza di questa relazione lineare, unita alle caratteristiche del motore passo-passo che presenta solo errori periodici e nessun errore accumulato. Rende molto semplice l'utilizzo dei motori passo-passo per controllare la velocità, la posizione e altre aree di controllo.
Dimensioni del motore passo-passo
I motori passo-passo sono classificati in base alla dimensione del telaio, come "Nema 17" o "Nema 23". Vi siete mai chiesti come ciò accada o cosa significhi? L'American Electrical Manufacturers Association stabilisce gli standard per molti prodotti elettrici, compresi i motori passo-passo. In generale, "Nema 17" significa che la superficie di montaggio del motore è di 1,7 pollici quadrati. Pertanto, le dimensioni del motore passo-passo Nema 23 sono 2,3 pollici quadrati. Oppure 57mm come mostrato di seguito.
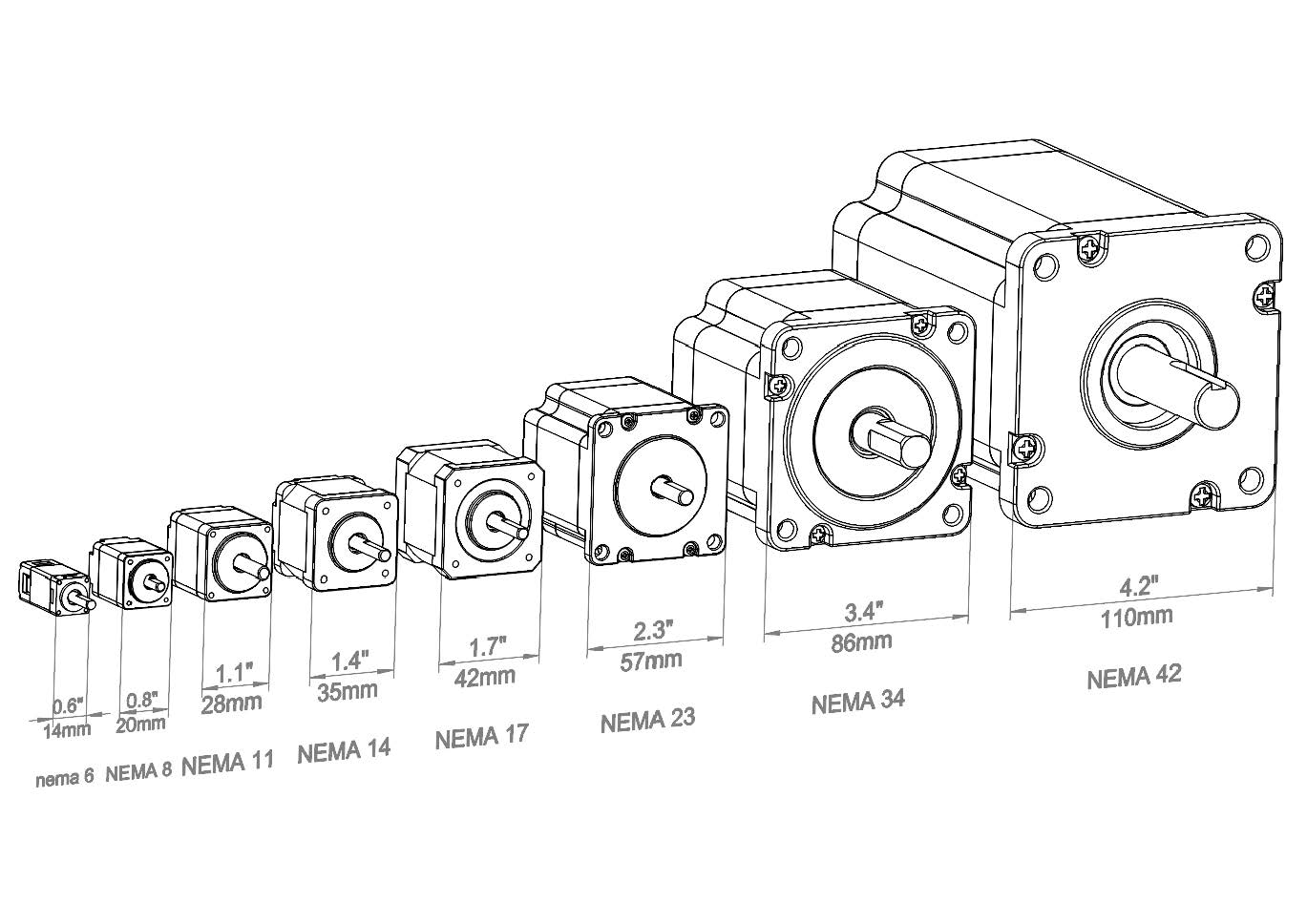
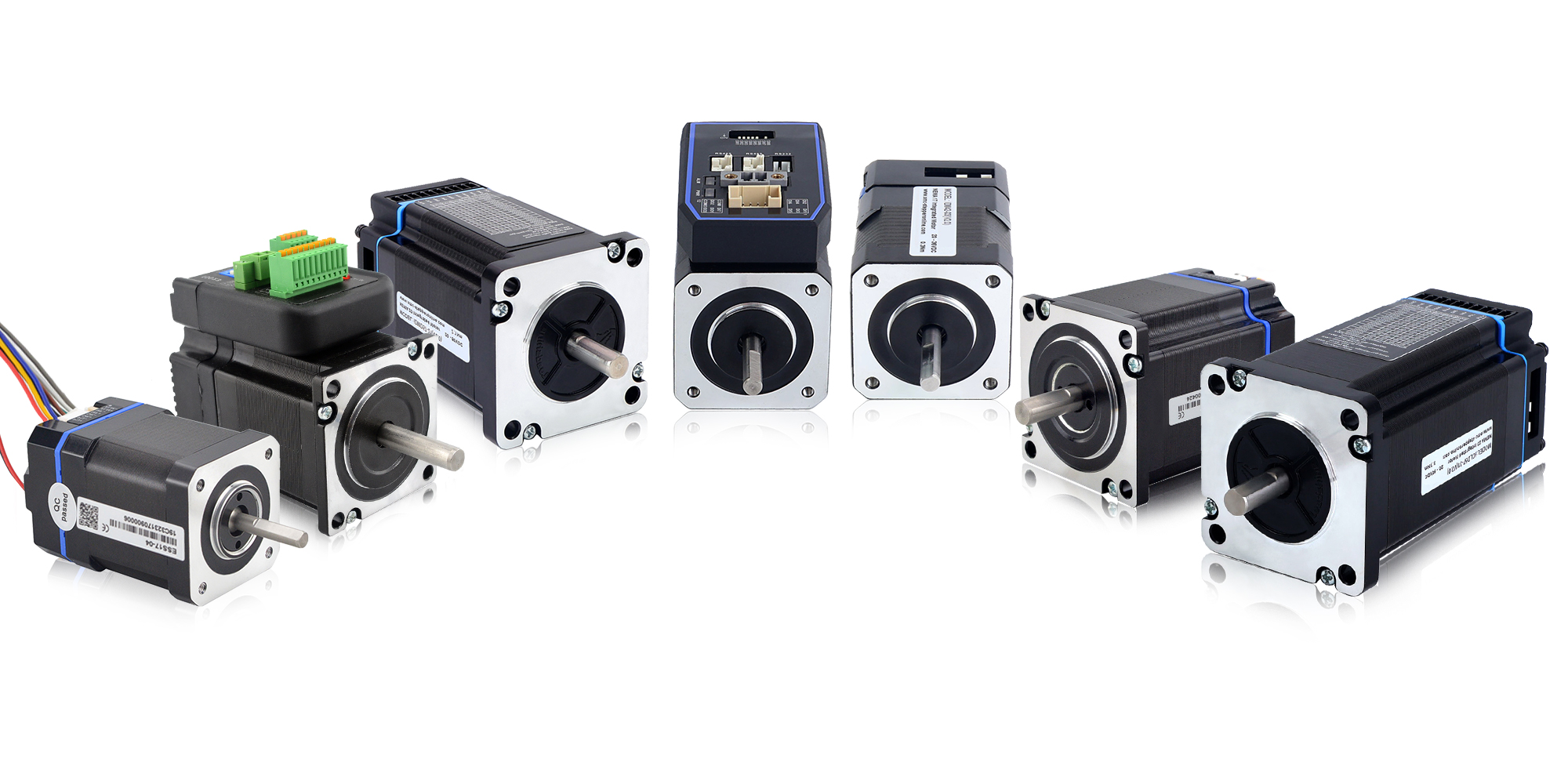
La foto sotto include i motori passo-passo Nema di dimensioni 06, 08, 11, 14, 17, 23, 24, 34 e 42. La dimensione 24 è un po' un'anomalia: non esiste una definizione Nema ufficiale per la dimensione 24. Si monta in modo simile alla dimensione 23, ma è leggermente più larga (circa 4 mm), consentendo l'uso di rotori e statori più grandi e quindi circa il 30% più coppia.

In sostanza, i produttori concordano sullo standard proposto. Ciò offre ai produttori una maggiore flessibilità di progettazione perché sanno in anticipo che un motore Nema 17 si adatterà a un altro supporto Nema 17 senza dover riprogettare nulla; soprattutto se scelgono di cambiare fornitore di motori.
Tipi di motori passo-passo
Esistono molti tipi di motori passo-passo venduti da STEPPERONLINE e comprendere le caratteristiche e gli usi dei diversi tipi di motori passo-passo ti aiuterà a decidere quale tipo è il migliore per te.
Il motore passo-passo ibrido è una combinazione di motore a riluttanza variabile e motore a magnete permanente. Lo statore è stimolato elettromagneticamente come un motore passo-passo a riluttanza variabile e il rotore del motore passo-passo è magnetizzato assialmente come un motore passo-passo a magnete permanente. Questo motore passo-passo è un attuatore che converte gli impulsi elettrici in spostamento angolare.
Compared to the other two types of stepper motors, hybrid stepper motors provide higher torque with smaller step angle and have a better dynamic property. With the development of science and technology, especially the development of permanent magnet materials, semiconductor technology and computer technology, these stepper motors have been widely used in industrial automation, robotics, textile and medical industries.
Un motore passo-passo ad anello chiuso è un motore passo-passo con un encoder aggiunto all'estremità del motore per ottenere il controllo ad anello chiuso. Il controllo ad anello chiuso di un motore passo-passo è un servosistema che utilizza il feedback di posizione e/o il feedback di velocità per determinare il cambiamento di fase appropriato alla posizione del rotore, che può migliorare notevolmente le prestazioni del motore passo-passo senza perdere passi.
Il motore passo-passo a circuito chiuso adotta una struttura a doppio avvolgimento e il suo motore utilizza un encoder lineare ad alta precisione. Ogni volta che il motore ruota di un fotogramma, l'encoder emette un impulso, in modo da poter ottenere la posizione di rotazione precisa del motore, mentre i normali motori passo-passo ne hanno solo uno. La posizione dell'avvolgimento e la rotazione del motore non sono affidabili.

Il motore passo-passo ad anello chiuso adotta il controllo latch, che richiede l'ingresso di un impulso di riferimento. Attraverso il controllo del feedback, l'impulso di controllo può essere sincronizzato. La posizione di rotazione del motore può essere mantenuta costante, mentre il normale motore passo-passo adotta il controllo ad anello aperto e non necessita di immettere un impulso di riferimento. È necessario controllare solo la frequenza del passo e la direzione del motore e la posizione di rotazione del motore è incontrollabile.
Rispetto ai normali motori passo-passo, i motori passo-passo ad anello chiuso hanno capacità di risposta dinamica più elevate e possono ottenere un controllo preciso della posizione rotazionale con piccoli errori di posizione. Inoltre, ha un'elevata precisione e la precisione della posizione può essere controllata entro 0,1 gradi, mentre la precisione della posizione dei normali motori passo-passo può essere controllata solo entro 1 grado, con scarsa stabilità operativa e grandi errori di posizione.
Inoltre, i motori passo-passo ad anello chiuso hanno una capacità di carico maggiore e possono sopportare carichi maggiori, mentre i normali motori passo-passo hanno una capacità di carico inferiore e hanno una resistenza inferiore.
I motori passo-passo integrati combinano azionamenti e motori passo-passo in un'unica unità. I motori passo-passo integrati offrono un design salvaspazio che riduce il cablaggio e fa risparmiare sui costi rispetto ai componenti separati del motore e dell'azionamento. Sono ideali per applicazioni quali imballaggio ed etichettatura, test e misurazioni automatizzati, assemblaggio automatizzato e scienze della vita.
Altri vantaggi derivanti dall'integrazione di motori e unità di azionamento includono facilità di implementazione, ridotta complessità del cablaggio, configurazione e progettazione del sistema più rapide e compatibilità garantita con l'azionamento del motore.
● Motore passo-passo a magnete permanente
I motori a magneti permanenti utilizzano un magnete permanente (PM) nel rotore e funzionano con l'attrazione o la repulsione tra il magnete del rotore e gli elettromagneti dello statore. Il rotore del motore passo-passo a magnete permanente è realizzato in acciaio a magnete permanente. Lo statore del motore passo-passo viene trasformato in un polo dentato a forma di artiglio mediante il metodo di stampaggio e il rotore adotta un acciaio magnetico a magnete permanente con magnetizzazione multipolare radiale. Il campo magnetico generato dalla direzione della corrente della bobina si esclude a vicenda con il campo magnetico del rotore, in modo che il motore ruoti all'inverso.
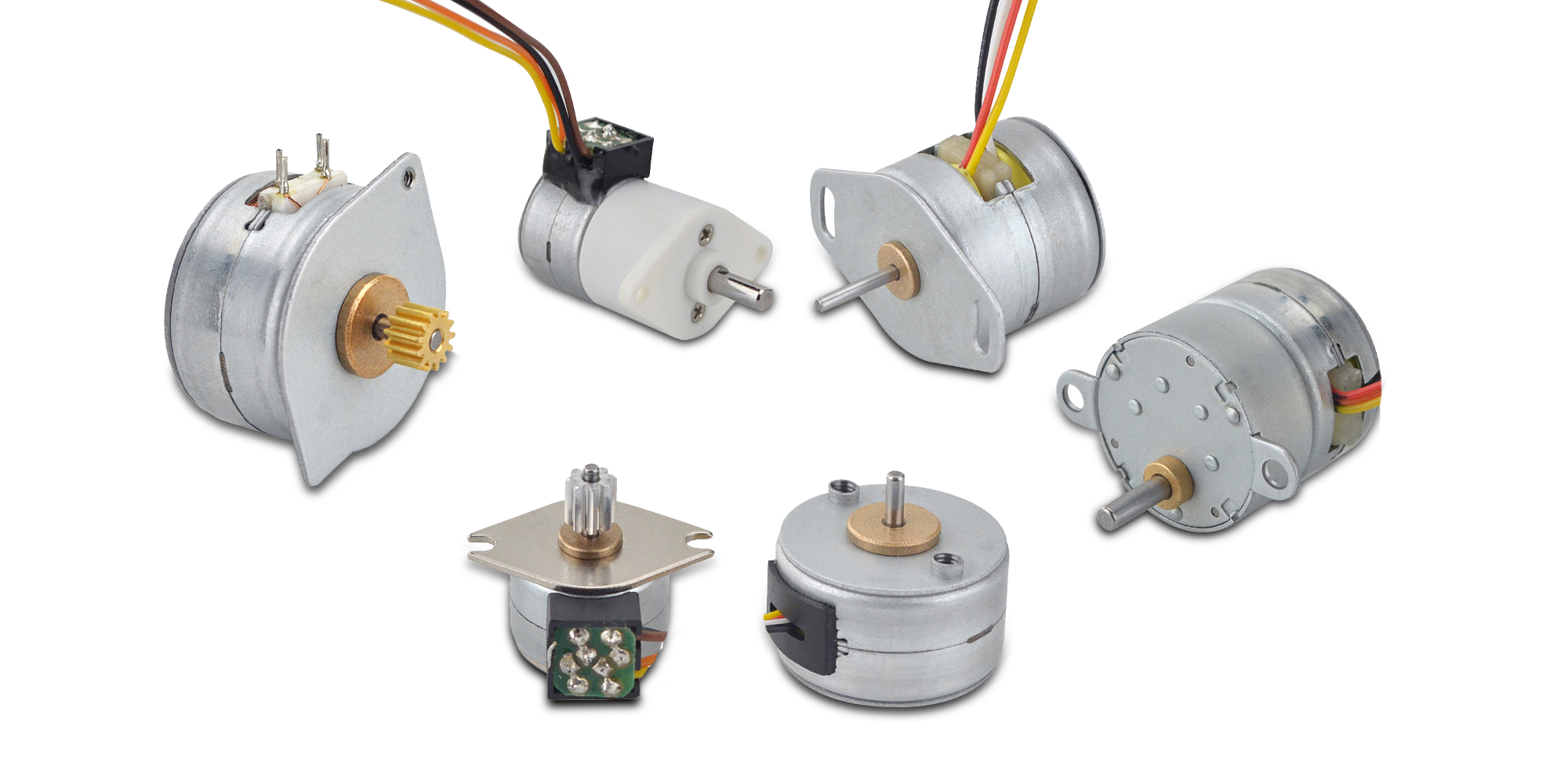
Questo motore passo-passo è noto anche come motore passo-passo PM, la direzione assiale dell'intero statore e rotore del motore è divisa in due sezioni e la parte centrale è separata da un pezzo di separazione magnetica. Le due sezioni sono separate tra loro da un angolo di passo e ciascuna è costituita da uno statore, un rotore e un anello di avvolgimento che è rivestito sullo statore. Il motore passo-passo PM viene utilizzato principalmente in apparecchiature periferiche per computer, sistemi fotografici, dispositivi combinati optoelettronici, controllo di valvole, reattori nucleari, terminali bancari, macchine utensili CNC, avvolgitrici automatiche, orologi elettronici e apparecchiature mediche, ecc.
● Motore passo-passo a riluttanza variabile
Un motore passo-passo a riluttanza variabile è un tipo di motore elettrico che funziona secondo il principio della riluttanza magnetica. Questo motore è costruito con un rotore in ferro e diversi avvolgimenti dello statore. Gli avvolgimenti sono magnetizzati in una sequenza specifica, facendo sì che il rotore si muova a passi discreti.
I motori passo-passo a riluttanza variabile forniscono velocità di passo elevate e una buona coppia a basse velocità. Tuttavia, a velocità più elevate le prestazioni potrebbero essere meno soddisfacenti a causa di problemi di risonanza.
I motori passo-passo a riluttanza variabile sono considerati robusti e affidabili, il che li rende adatti ad ambienti in cui il motore può essere soggetto a condizioni difficili.
Uno dei principali svantaggi dei motori passo-passo a riluttanza variabile è che tendono a essere più rumorosi rispetto ad altri tipi di motori passo-passo. Ciò è dovuto al fatto che il rotore è scarsamente smorzato, con conseguenti livelli più elevati di vibrazioni meccaniche.
I motori passo-passo lineari sono un tipo speciale di motore passo-passo il cui design e principi di funzionamento sono diversi dai tradizionali motori passo-passo rotativi. Un motore passo-passo lineare è un motore lineare che raggiunge lo spostamento lineare attraverso il movimento lineare anziché il movimento rotatorio ottenuto dai tradizionali motori passo-passo. La struttura di un motore passo-passo lineare è solitamente costituita da uno statore fisso e un cursore mobile. Lo statore è dotato di bobine interne e il cursore è dotato di magneti permanenti. Quando la corrente passa attraverso la bobina dello statore, viene generato un campo magnetico. L'interazione tra il magnete permanente del cursore e il campo magnetico dello statore genera una forza di attrazione o repulsione, facendo sì che il cursore si muova linearmente sull'asse fisso. Il controllo di un motore passo-passo lineare è simile a quello di un motore passo-passo tradizionale. Controllando la direzione e l'entità della corrente, è possibile controllare la posizione e la velocità del cursore. Il segnale a impulsi di ciascun motore passo-passo sposta il cursore di un passo fisso, in modo da poter ottenere uno spostamento lineare preciso.

Esistono tre tipi comuni di motori passo-passo lineari: azionamento esterno, albero passante e albero fisso. Può essere selezionato in base agli indicatori chiave di applicazioni specifiche. I motori passo-passo lineari presentano i vantaggi di alta precisione, trasmissione senza gioco e risposta rapida, quindi sono preferiti in applicazioni che richiedono un controllo del movimento lineare ad alte prestazioni.
● Unipolare contro bipolare
Un motore passo-passo è un motore che controlla l'angolo di rotazione tramite impulsi elettrici. I motori passo-passo bipolari e i motori passo-passo unipolari sono due tipi comuni di motori passo-passo. La principale differenza tra loro è il metodo di controllo. Un motore passo-passo bipolare deve invertire la corrente per cambiare la direzione del rotore, quindi richiede 4 elettrodi per controllare la direzione, ciascun elettrodo ha due stati (ON/OFF).
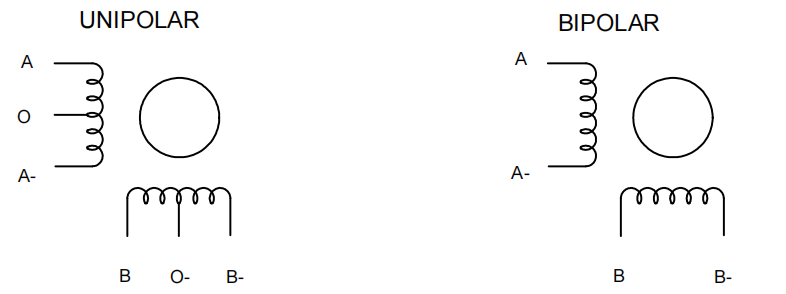
Un motore passo-passo unipolare necessita solo di due elettrodi per controllare la rotazione del rotore e il motore ruota cambiando la direzione della corrente. Pertanto, rispetto ai motori passo-passo bipolari, i motori passo-passo unipolari necessitano solo di 2 elettrodi per ottenere lo stesso controllo del movimento. Tuttavia, poiché i motori passo-passo unipolari richiedono l'aggiunta di un driver unipolare nel circuito di controllo, la complessità del circuito è leggermente superiore.
I motori passo-passo bipolari e i motori passo-passo unipolari presentano ciascuno i propri vantaggi e svantaggi e il motore appropriato può essere selezionato in base allo scenario applicativo specifico.
I vantaggi dei motori passo-passo bipolari sono coppia elevata, velocità elevata, alta precisione e controllo semplice, quindi vengono spesso utilizzati in situazioni in cui sono richiesti controllo ad alta velocità e precisione. La coppia e la precisione dei motori passo-passo unipolari vengono confrontate con quelle dei motori passo-passo bipolari. Il motore è peggio e più lento. Inoltre, i driver utilizzati nei motori passo-passo unipolari sono costosi e hanno meno opzioni.
Come scegliere il motore passo-passo, il driver e l'alimentatore?
I motori passo-passo sono una buona scelta quando è necessario controllare il movimento. Possono essere utilizzati in scenari in cui è richiesto il controllo dell'angolo di rotazione, della velocità, della posizione e della sincronizzazione.
Quindi, quando scegliamo un motore passo-passo, ci sono diversi fattori che devono essere presi in considerazione.
1. Come viene accoppiato il motore al carico?
Dopo aver determinato il tipo di accoppiamento tra il motore e il carico, è possibile selezionare un motore passo-passo in base alla lunghezza dell'albero, al diametro e al tipo di albero. Attualmente, i motori passo-passo standard STEPPERONLINE hanno una varietà di lunghezze di albero, diametri di albero e tipi di albero e possono fornire vari servizi personalizzati per l'albero del motore.2. A quale velocità deve spostarsi o accelerare il carico?
Quando si sceglie il motore giusto, è necessario considerare l'equilibrio tra velocità e carico. Per alcune apparecchiature che richiedono movimenti rapidi, possiamo scegliere motori ad alta velocità, ma se il carico è maggiore, dobbiamo scegliere un motore con una coppia maggiore. Pertanto, quando si sceglie un motore, è necessario considerare l'equilibrio tra velocità e carico in base alle effettive esigenze e scegliere un motore in grado di soddisfare sia la velocità di movimento che il carico. Di seguito è riportata la velocità massima e la velocità consigliata di ciascun motore di ciascuna dimensione in condizioni di assenza di carico.
| Velocità a vuoto | |||
| Tipo motore | Dimensioni (mm) | Massimo. Velocità (rpm) | Velocità di lavoro consigliata (rpm) |
| Motore ad anello aperto | Nema 6(14x14) | 1000 | 100-600 |
| Nema 8(20x20) | 1000 | 100-600 | |
| Nema 11(28x28) | 1000 | 100-600 | |
| Nema 14(35x35) | 1000 | 100-600 | |
| Nema 16(40x40) | 1000 | 100-500 | |
| Nema 17(42x42) | 1000 | 100-500 | |
| Nema 23(57x57) | 1000 | 100-500 | |
| Nema 24(60x60) | 1000 | 100-500 | |
| Nema 34(86x86) | 1000 | 100-400 | |
| Nema 42(110x110) | 500 | 100-300 | |
| Motore ad anello chiuso | Nema 8(20x20) | 2000 | 100-1500 |
| Nema 11(28x28) | 2000 | 100-1500 | |
| Nema 14(35x35) | 2000 | 100-1000 | |
| Nema 17(42x42) | 2000 | 100-1000 | |
| Nema 23(57x57) | 1500 | 100-1000 | |
| Nema 24(60x60) | 1500 | 100-1000 | |
| Nema 34(86x86) | 1500 | 100-1000 | |
È inoltre possibile determinare se il motore soddisfa i requisiti di velocità di carico in base al diagramma della curva del motore.
3. Quanta coppia è necessaria per spostare il carico?
La maggior parte dei motori ha valori di coppia nominali. Questo è ciò che devi guardare per decidere se il motore ha la forza per fare quello che vuoi. La coppia di tenuta di un motore passo-passo è simile alla "potenza" di un motore convenzionale. Tuttavia, la struttura fisica dei motori passo-passo è completamente diversa dai motori CA e CC e la potenza di uscita del motore varia a seconda della velocità, della corrente e della tensione di ingresso.
In generale, se la coppia richiesta è inferiore a 0,8N.m, scegliere Nema 8 (20x20 mm), Nema 11 (28x28 mm), Nema 14 (35x35 mm), Nema 16 (39x39 mm), Nema 17 (42x42 mm); se la coppia è di circa 1 Nm, scegli un motore passo-passo Nema 23. Se la coppia è superiore a diversi Nm, è necessario scegliere un motore passo-passo con specifiche come Nema 34 e Nema 42.
4. Quale precisione è richiesta per posizionare un carico?
La precisione dei motori passo-passo aumenta quando i passi sono più piccoli. Questo perché una rivoluzione è suddivisa in passaggi più attenti e numerosi che lasciano meno spazio agli errori. Un motore passo-passo con un angolo di 0,9°, ad esempio, offre una precisione maggiore rispetto a un motore passo-passo con un angolo di 1,8°.
Un malinteso comune è che i motori da 1,8° che funzionano a mezzi passi raggiungeranno la stessa precisione dei motori passo-passo da 0,9° che funzionano a passi completi. Un altro malinteso è che la coppia venga persa quando si utilizza un motore passo-passo da 0,9°. Questi presupposti non sono corretti e la comprensione delle caratteristiche di progettazione meccanica può spiegarne il motivo.
In generale, i motori passo-passo da 0,9° sono più adatti per applicazioni ad alta velocità e alta precisione. Al contrario, i motori passo-passo da 1,8° forniscono una coppia maggiore ma una precisione inferiore. Sono disponibili anche motori passo-passo da 0,9° con design brevettato a 12 poli. Questi motori più avanzati combinano le caratteristiche dei motori da 0,9° e 1,8° e offrono elevata precisione e coppia più elevata.
● Scegli il driver del motore passo-passo
Per ottenere il massimo dal tuo motore passo-passo, devi utilizzare il driver appropriato. Quando si seleziona un driver ci sono tre elementi chiave da tenere a mente: tensione, corrente, microstepping e numero di fasi. Ciascuno gioca un ruolo importante nelle prestazioni del motore. La mancata considerazione di questi parametri può comportare prestazioni scadenti, rumore più forte o persino surriscaldamento e guasto del motore, con conseguente perdita di tempo di produzione e aumento dei costi di manutenzione.
1. Voltaggio nominale
Il superamento della tensione nominale massima del motore o il funzionamento con una tensione di alimentazione superiore può causare il malfunzionamento del motore. Per questo motivo è necessario conoscere la tensione nominale massima o la tensione nominale tipica del motore dalla descrizione del prodotto o dalla curva di coppia quando si sceglie un driver per motore passo-passo. I motori passo-passo sono generalmente alimentati da driver che funzionano con corrente alternata (120 V o 240 V) o corrente continua a bassa tensione (come 24V, 36V o 48V). Se si fa funzionare un motore a una tensione superiore a quella specificata, ad esempio un motore classificato per 24V CC, ad alta tensione, il motore si surriscalderà rapidamente. Al contrario, un motore azionato a una tensione troppo bassa (ad esempio un motore ad alta tensione che funziona a 24V CC) produrrà meno potenza e potrebbe causare lo stallo del motore se il carico non viene ridotto.
2. Valutazione attuale
Assicurati che il driver sia adatto a un ampio intervallo di corrente in modo da poter testare il sistema a tensioni diverse adatte alla tua applicazione. Per la corrente nominale, è necessario considerare sia la corrente continua o effettiva che il fabbisogno di corrente di picco. Nei motori DC con spazzole e senza spazzole, la FEM posteriore non è presente durante l'avvio e l'arresto e il conducente vede solo la resistenza dell'avvolgimento del motore. Si verifica quindi un picco di corrente prima che il motore si avvii e generi una forza controelettromotrice opposta alla tensione di alimentazione, che riduce il consumo di corrente. Anche se la tua applicazione richiede solo un massimo di 1 A di corrente continua durante il normale funzionamento, potrebbe dover elaborare da 2 a 3 volte o anche più corrente continua durante l'avvio e lo stallo.
3. Micropassi
I motori passo-passo si muovono a passi che normalmente sono 1,8°, ovvero 200 passi per giro. Questo può essere un problema se abbiamo bisogno di piccoli movimenti. Un’opzione potrebbe essere quella di utilizzare una sorta di cambio, ma esiste un’altra opzione: il microstepping. Microstepping significa che possiamo avere più di 200 passi per giro e quindi movimenti più piccoli.
Quando si utilizzano motori passo-passo a passi completi, l'uscita del driver del motore passo-passo assomiglia a un segnale a onda quadra e genera movimenti grossolani. Più grandi sono i micropassi, più il segnale in uscita assomiglia a un'onda sinusoidale e il motore passo-passo si muove in modo più fluido. Tuttavia, questo ha anche uno svantaggio. All'aumentare del valore del micropasso, la coppia diminuisce bruscamente e, se il valore è troppo grande, il motore non può generare una coppia sufficiente per girare. Normalmente, è possibile utilizzare 1/4, 1/8 o anche 1/16 per ottenere movimenti sufficientemente fluidi e generare comunque una coppia sufficiente.
4. Numero di fasi
I driver del motore passo-passo vengono utilizzati per controllare un numero specifico di fasi. Per i tipici motori passo-passo unipolari e bipolari vengono utilizzati azionamenti bifase, ma i motori a riluttanza variabile utilizzano azionamenti trifase. Prima di selezionare il driver, confermare il numero di fase del motore.
Quando utilizzi un motore passo-passo, avrai bisogno di un alimentatore per alimentare il motore passo-passo. Un'alimentazione corretta può far funzionare il motore passo-passo con prestazioni ottimali. Invece, un'alimentazione errata potrebbe causare prestazioni ridotte o un maggiore spreco di energia.
Di seguito sono riportati alcuni suggerimenti per la scelta dell'alimentatore:
| Motor Size | Driving Voltage |
| Nema 8 - Nema 17 | 12 - 24VDC |
| Nema 23, Nema 24 | 24 - 48VDC |
| Nema 34 | 48 - 100VDC/30 - 70VAC |
| Nema 42 - Nema 52 | 110 - 220VAC |
- Confermare la corrente nominale del motore. Puoi trovarlo nella scheda tecnica del motore.
- Conferma la tensione di guida. La tensione di pilotaggio è il fattore principale nella scelta di un alimentatore. Normalmente, una tensione più elevata avrà prestazioni migliori.
La tabella sottostante riporta la tensione consigliata per i motori passo-passo, puoi scegliere la tensione giusta in base alla tua applicazione.
Calcola il valore della potenza. Ti forniamo una formula semplice:
P=n*I*V*1.2P: Valore di potenza
n: Numero di motori passo-passo
I: Corrente nominale del motore
V: tensione di pilotaggio
1.2: significa 20% del margine
es. 3 unità di motori con corrente nominale di 3A ciascuna e tensione di pilotaggio di 36V, la potenza stimata è di circa: 3*3A*36V*1,2=388,8W. quindi puoi scegliere un alimentatore da 36V 400W
Nota: la formula è solo un valore stimato di potenza, diverse condizioni di lavoro richiederanno una potenza diversa. Ad esempio, in un sistema a 3 assi, non tutti e 3 i motori funzionano contemporaneamente e non tutti e 3 i motori funzionano con il carico massimo ecc. In questa condizione, il valore della potenza potrebbe essere inferiore al valore calcolato dalla formula.
Vantaggi e svantaggi dei motori passo-passo
Vantaggi dei motori passo-passo
- Grazie alla loro struttura interna, i motori passo-passo non richiedono sensori per rilevare la posizione del motore. Poiché il motore si muove a "passi", la posizione del motore in un determinato momento può essere determinata semplicemente contando questi passi.
- Anche i motori passo-passo sono molto facili da controllare. Sebbene il motore richieda un driver, non richiede calcoli o impostazioni complessi per funzionare correttamente. In generale, la quantità di lavoro richiesta per il controllo è inferiore rispetto ad altri motori. Con il metodo microstepping è possibile ottenere un'elevata precisione di posizionamento fino a circa 0,007°.
- I motori passo-passo offrono una coppia elevata a velocità inferiori, sono eccellenti per mantenere la posizione e hanno una lunga durata.
- Il rotore del motore passo-passo ha una massa grande e un'inerzia elevata. È soggetto a vibrazioni e rumore durante il funzionamento ad alta velocità, che influiscono sulla stabilità e sulla precisione del movimento. Questo è uno dei principali svantaggi dei motori passo-passo ed è necessario adottare misure per mitigare o eliminare questo effetto.
- Il principio di funzionamento del motore passo-passo è quello di controllare la posizione e la velocità attraverso il controllo degli impulsi istantanei a breve termine. Il funzionamento a lungo termine può facilmente causare il surriscaldamento o addirittura la bruciatura del motore. Per le applicazioni che richiedono un funzionamento continuo per lunghi periodi di tempo, i motori passo-passo potrebbero non essere la scelta migliore.
Usi e applicazioni del motore passo-passo
A causa delle caratteristiche dei motori passo-passo, vengono utilizzati in molte applicazioni che richiedono un semplice controllo della posizione e la capacità di mantenere la posizione, tra cui:
1. Stampanti 3D
Il motore passo-passo è uno dei componenti importanti della stampante 3D. A seconda del tipo di stampante, possono essere utilizzati per una varietà di applicazioni. Ad esempio, i motori passo-passo vengono utilizzati per spostare individualmente un estrusore o costruire una piattaforma lungo gli assi x, y e z. In genere il gruppo estrusore è dotato di un motore passo-passo che trascina il filamento nell'estrusore.
I motori passo-passo sono unici in quanto possono spostarsi fino a un intervallo noto e quindi rimanere in quella posizione. Poiché possono spostare ripetutamente gli oggetti in una posizione fissa, vengono spesso utilizzati nei robot e nelle stampanti.
I motori passo-passo sono disponibili in molte dimensioni. Le dimensioni più comunemente utilizzate nelle stampanti 3D sono NEMA 14, NEMA 17, NEMA 23 e NEMA 24.
2. Macchine CNC
I motori passo-passo sono una scelta alternativa ai servomotori e possono fornire energia alla maggior parte dei tipi di macchinari CNC. Le applicazioni CNC comprendono un'ampia gamma di processi produttivi in cui software preprogrammati controllano il funzionamento e il movimento fisico delle macchine utensili negli stabilimenti e negli ambienti di produzione.Sebbene i motori passo-passo nelle applicazioni CNC siano spesso visti come un'alternativa più "economica" ai servomotori, si tratta di una semplificazione eccessiva basata su conoscenze tecnologiche obsolete e oggi non è sempre del tutto accurata. I motori passo-passo tendono ad essere più economici dei servomotori a parità di potenza, ma le versioni moderne sono ugualmente versatili. Di conseguenza, i motori passo-passo trovano applicazioni più diffuse e sono presenti in una gamma più ampia di macchine e sistemi, dalle macchine utensili ai computer desktop e alle automobili.
I motori passo-passo CNC presentano un vantaggio fondamentale rispetto ai servomotori in quanto non richiedono encoder. I servomotori sono intrinsecamente più difficili da comprendere e da utilizzare rispetto ai motori passo-passo, in parte perché includono encoder, che sono più soggetti a guasti rispetto a molti altri componenti di servomotori affidabili. I motori passo-passo non necessitano di encoder, il che li rende teoricamente più affidabili dei servomotori.
Inoltre, i motori passo-passo sono anche senza spazzole (a differenza dei servomotori), il che significa che non richiedono sostituzioni regolari purché i cuscinetti siano in buone condizioni di funzionamento.
3. Obiettivi della fotocamera
I motori passo-passo sono ampiamente utilizzati in varie applicazioni nell'ambito della tecnologia delle fotocamere di fascia alta. Possono essere impiegati per controllare strutture interne estremamente precise, come la messa a fuoco automatica e le impostazioni di apertura all'interno dell'obiettivo. Inoltre, i motori passo-passo trovano applicazione negli alloggiamenti e nelle strutture meccaniche esterne di telecamere di sicurezza e sistemi di monitoraggio remoto.
In particolare, i motori passo-passo, insieme ai cursori elettrici della fotocamera, consentono un funzionamento molto fluido dei dispositivi di posizionamento della fotocamera. Ciò significa che gli obiettivi catturati dai dispositivi di sicurezza possono essere tenuti in modo affidabile, evitando potenziali problemi di distorsione dell'immagine causati dai movimenti fisici della fotocamera attorno al suo campo visivo. I motori passo-passo offrono diverse caratteristiche interessanti per i sistemi di posizionamento di telecamere e videosorveglianza, tra cui coppia completa da fermo, tempi di risposta estremamente precisi e istantanei per tutti gli input di movimento, ripetibilità coerente dei movimenti preprogrammati e semplice controllo ad anello aperto basato su dimensioni di passo fisse .
Oltre a quanto sopra, i motori passo-passo vengono utilizzati anche nella sicurezza, nei robot di servizio, nelle stampanti, negli scanner, nelle macchine tessili, nelle macchine per l'imballaggio, nelle unità compact disc e nell'illuminazione intelligente, ecc.
