







































































 Plomo 10.16mm(0.4\") con sensor")
 Plomo 5.08mm(0.2\") con sensor")
 Plomo 2.54mm(0.1\") con sensor")
 Plomo 12.7mm(0.5\") con sensor")
 Plomo 8mm(0.314961\") con sensor")
 Plomo 12.7mm(0.5\") con sensor")
 Plomo 6.35mm(0.25\") con sensor")
 Plomo 6.35mm(0.25\") con sensor")
 Plomo 2.54mm(0.1\") con sensor")
 Plomo 2.54mm(0.1\") con sensor")
 Plomo 4mm(0.15748\") con sensor")
 Plomo 2mm(0.07874\") con sensor")
 Plomo 12.7mm(0.5\") con sensor")
 Plomo 6.35mm(0.25\") con sensor")
 Plomo 2.54mm(0.1\") con sensor")
 Plomo 10.16mm(0.4\") con sensor")
 Plomo 5.08mm(0.2\") con sensor")
 Plomo 2.54mm(0.1\") con sensor")
")
 Motor paso a paso Nema 34 y controlador y fuente de alimentación de 60V")
")
")
 Motor paso a paso Nema 23 y controlador")
 Motor paso a paso Nema 34 y controlador")
 Motor paso a paso Nema 23 y controlador")
 Motor pasoA paso Nema 34 y Driver")
 Motor paso a paso Nema 34 y controlador")
 Motor Nema 34 y driver fuente de alimentación de 60V")















Los motores paso a paso y los servomotores son componentes de control importantes en el control de accionamiento industrial y se utilizan en una amplia gama de aplicaciones. Sin embargo, para muchos clientes no entienden las principales diferencias entre estos dos tipos de motor, por lo que nunca están seguros de cómo elegir. Entonces, ¿cuáles son las principales diferencias entre los motores paso a paso y los servomotores? La siguiente es una breve descripción de sus diferencias.
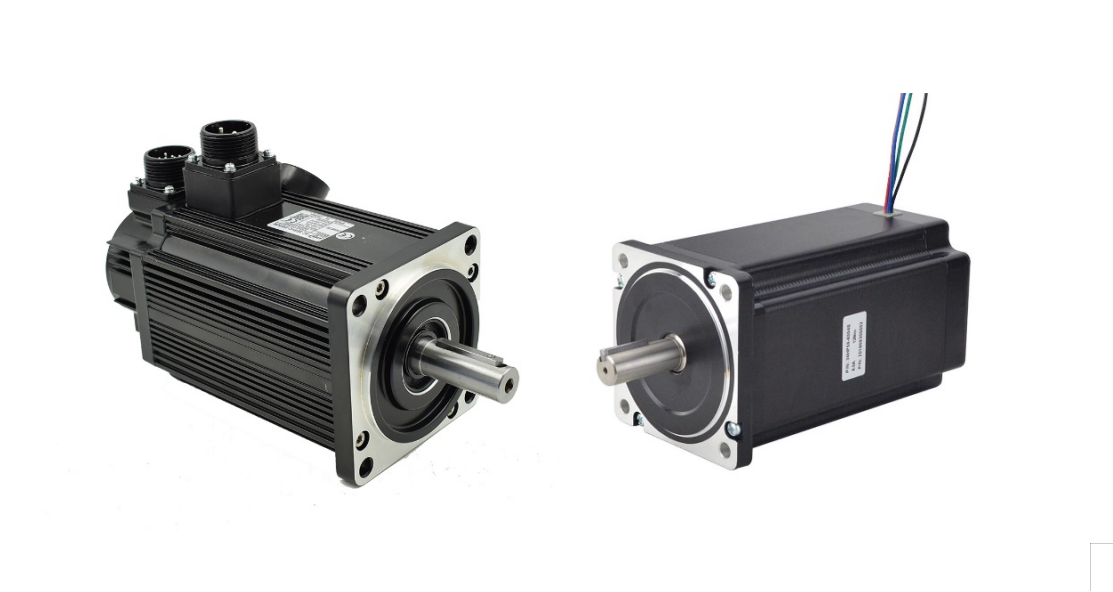
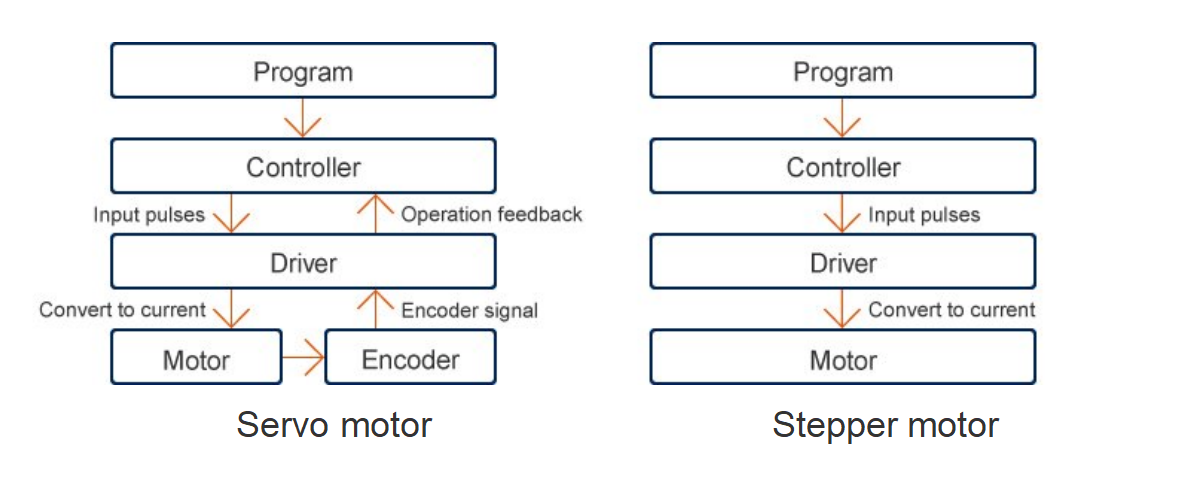
1.Principio de funcionamiento
Estos dos tipos de motores son muy diferentes en términos de principio de funcionamiento. Los motores paso a paso son elementos de control de bucle abierto que convierten las señales de impulsos eléctricos en desplazamientos angulares o lineales.
En cuanto al servomotor, se basa principalmente en pulsos para el posicionamiento. El servomotor en sí tiene la función de enviar pulsos. Para cada ángulo de rotación del servomotor, se enviará un número correspondiente de pulsos, formando así un circuito cerrado con los pulsos recibidos por el servomotor, de modo que el sistema sabrá exactamente cuántos pulsos se han enviado y recibido de vuelta. , que permite un control preciso de la rotación del motor y un posicionamiento preciso.
2.Velocidad y par
Los motores paso a paso son propensos a vibraciones de baja frecuencia cuando funcionan a bajas velocidades, por lo que cuando los motores paso a paso funcionan a bajas velocidades, generalmente se requiere tecnología de amortiguación para superar el fenómeno de vibración de baja frecuencia, como agregar amortiguadores al motor o usar tecnología de subdivisión en el conductor. Los servomotores no sufren este fenómeno y sus características de control en lazo cerrado determinan que mantengan un excelente desempeño a altas velocidades. Las características momento-frecuencia de los dos son diferentes y, por lo general, la velocidad nominal de un servomotor es mayor que la de un motor paso a paso. El par de salida del motor paso a paso disminuirá a medida que aumenta la velocidad, mientras que el servomotor tiene una salida de par constante, por lo que el motor paso a paso generalmente no tiene capacidad de sobrecarga, pero el servomotor de CA tiene una mayor capacidad de sobrecarga.
En resumen:
Velocidad y par motor paso a paso:
- a. El motor paso a paso tiene menos velocidad que el servomotor, el motor paso a paso normal tiene una velocidad máxima de 1500 RPM.
- b. A medida que aumenta la velocidad del motor, se reduce el par motor.
- c. Proporciona un par excelente en aplicaciones de baja velocidad.
- d. El motor paso a paso no es útil en las aplicaciones de control de par.
Velocidad y par del servomotor:
- a.El servomotor tiene una velocidad más alta que un motor paso a paso, sin embargo, en el mercado, obtendrá un variador de velocidad diferente hasta 5000 RPM.
- b.Obtenemos un par alto a una velocidad más alta.
- c.Proporciona un par excelente en aplicaciones de alta velocidad.
- d.Servo Motor se puede utilizar en las aplicaciones de control de par. (Ej. Herramienta para apretar tuercas)
3.Rendimiento operativo
Los motores paso a paso generalmente se controlan en bucle abierto. La pérdida de pasos o el bloqueo pueden ocurrir a una frecuencia de arranque demasiado alta o bajo una carga demasiado grande. Al usarlos, debe ocuparse de los problemas de velocidad o agregar codificadores para el control de bucle cerrado. Si bien el servomotor es un control de circuito cerrado, es más fácil de controlar y no sufre de pérdida de pasos.
4.Coste
El motor paso a paso tiene una ventaja en términos de rentabilidad. Para conseguir la misma función, el precio de un servomotor es superior al de un motor paso a paso de la misma potencia. La alta respuesta, alta velocidad y alta precisión de los servomotores significa inevitablemente que sean más caros.
5.Seleccione el motor más adecuado
En general, se considera que los sistemas de servocontrol funcionan mejor en aplicaciones que requieren velocidades superiores a 800 RPM y donde se requiere una respuesta dinámica alta. Los motores paso a paso son más adecuados para aplicaciones que requieren velocidades más bajas, aceleración de baja a media y un par de retención más alto.
En realidad, tanto los servomotores como los motores paso a paso tienen características propias y existe la posibilidad de interpenetración en sus aplicaciones. Con los avances en la fabricación de precisión y la tecnología de control de accionamiento, la tecnología paso a paso también se está mejorando y los motores paso a paso aún mantienen una posición importante en la industria.
¿Cuáles son algunos consejos cuando elige un servomotor o un motor paso a paso?
A.Seleccione el servomotor, si su requisito es el siguiente,
- a.Si desea información sobre su posición.
- b.Para aplicaciones de alta velocidad.
- c.Aplicaciones de control de velocidad.
- d.Aplicaciones de control de par.
- e.Para sistemas de maquinaria complejos.
- f.Para equipos más precisos y rápidos.
B.Seleccione el motor paso a paso, si su requisito es el siguiente:
- a. Su solicitud no debería requerir comentarios sobre la posición.
- b.Para aplicaciones de baja velocidad.
- c. Puede usar el motor paso a paso solo en aplicaciones de control de posición.
- d.Para aplicaciones de máquinas simples.
- e.Si su aplicación es para mantener el par.
6. Aplicaciones industriales de servomotores y motores paso a paso
a. Aplicación típica del servomotor:
- Robots
- Maquinaria de embalaje
- Enfoque automático de la cámara
- Máquinas CNC
- Máquinas de corte
- Máquinas de corte y conformado
- Control de válvula proporcional
- Maquinaria de impresión
b.Aplicación típica del motor paso a paso:
- Máquinas CNC de bajo costo
- Movimiento de husillo de bolas (pintura en aerosol o cortadoras de papel)
- Movimiento preciso arriba/abajo (máquina de soldar)
- impresoras 3D
- Pequeños robots
- Máquinas textiles
- Equipos médicos
7. Servomotor frente a motor paso a paso (en la table)
| # | Especificaciones | Servomotor | Motor paso a paso |
| 01 | Función del sistema | Sistema de circuito cerrado (retroalimentación de posición o codificador presente) | Sistema de bucle abierto (sin retroalimentación de posición ni codificador) |
| 02 | Coste | Muy caro | Económico |
| 03 | Velocidad | Alta velocidad (5000 RPM máximo) | Baja velocidad (1500 RPM máximo) |
| 04 | Control de par/velocidad odf | modo de control de par o control de velocidad | Sin modo de control de par o control de velocidad |
| 05 | Tensión de entrada | Uso de corriente CA | Uso de corriente CC |
| 06 | Par de torsión | Alto par en alta velocidad | Alto par a baja velocidad |
| 07 | Requisito | requiere ajuste | No requiere ajuste |
| 08 | Consumir energía | Consume más energía | Consume menos energía |
| 09 | Función | Complejo para puesta en marcha | Simple y más fácil para la puesta en marcha |
| 10 | Tamaño | Tamaño de motor de 50 W a 15 KW disponible | Tamaño de motor máximo de 750 W disponible |
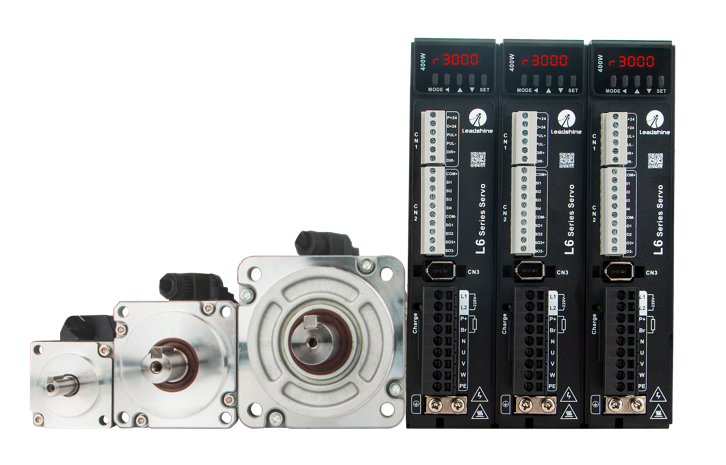
Actualmente, STEPPERONLINE proporciona una serie de Integrated Easy Servo Motores. Como nuestro servomotor de primera generación, es significativamente superior en términos de operación plug-and-play. A diferencia del tipo estándar de servomotor, el servomotor simple integrado ya tiene un controlador incorporado.
Lanzaremos nuestra próxima generación de servomotores de CA a finales de 2021.