







































































 Plomo 10.16mm(0.4\") con sensor")
 Plomo 5.08mm(0.2\") con sensor")
 Plomo 2.54mm(0.1\") con sensor")
 Plomo 12.7mm(0.5\") con sensor")
 Plomo 8mm(0.314961\") con sensor")
 Plomo 12.7mm(0.5\") con sensor")
 Plomo 6.35mm(0.25\") con sensor")
 Plomo 6.35mm(0.25\") con sensor")
 Plomo 2.54mm(0.1\") con sensor")
 Plomo 2.54mm(0.1\") con sensor")
 Plomo 4mm(0.15748\") con sensor")
 Plomo 2mm(0.07874\") con sensor")
 Plomo 12.7mm(0.5\") con sensor")
 Plomo 6.35mm(0.25\") con sensor")
 Plomo 2.54mm(0.1\") con sensor")
 Plomo 10.16mm(0.4\") con sensor")
 Plomo 5.08mm(0.2\") con sensor")
 Plomo 2.54mm(0.1\") con sensor")
")
 Motor paso a paso Nema 34 y controlador y fuente de alimentación de 60V")
")
")
 Motor paso a paso Nema 23 y controlador")
 Motor paso a paso Nema 34 y controlador")
 Motor paso a paso Nema 23 y controlador")
 Motor pasoA paso Nema 34 y Driver")
 Motor paso a paso Nema 34 y controlador")
 Motor Nema 34 y driver fuente de alimentación de 60V")














Un artículo le permite saber todo sobre los motores paso a paso
Haga clic directamente en cualquier capítulo que le interese.
● ¿Qué es un motor paso a paso?
Un motor paso a paso es un motor de CC síncrono sin escobillas que convierte pulsos digitales en rotación de un eje mecánico. A diferencia de muchos otros tipos estándar de motores, un motor paso a paso no gira continuamente durante un número determinado de revoluciones hasta que se corta el voltaje de CC que se le suministra. Dispone de varias bobinas que se organizan en grupos, las llamadas "fases". Si cada fase se enciende por turno, el motor gira paso a paso.
Los motores paso a paso dividen todo el movimiento giratorio en varios pasos iguales. Siempre que el motor tenga el tamaño adecuado para el par y la velocidad de la aplicación, se puede controlar la posición del motor para que se mueva en uno de estos pasos y permanezca allí sin ninguna retroalimentación de un sensor de posición.
Además, un motor paso a paso es un dispositivo de entrada y salida digital. Es particularmente adecuado para aplicaciones en las que la señal de control se presenta en forma de pulsos digitales y no en forma de voltajes analógicos. Un pulso digital enviado a un controlador de motor paso a paso hace que el motor aumente un cierto ángulo de movimiento. A medida que aumenta la frecuencia de los pulsos digitales, el movimiento paso a paso se convierte en una rotación continua.
Con el paso a paso controlado por computadora, puede lograr un posicionamiento y/o control de velocidad muy precisos. Como resultado, los motores paso a paso se han convertido en el motor elegido para muchas aplicaciones de control de movimiento de precisión.
● ¿Cómo funciona el motor paso a paso?
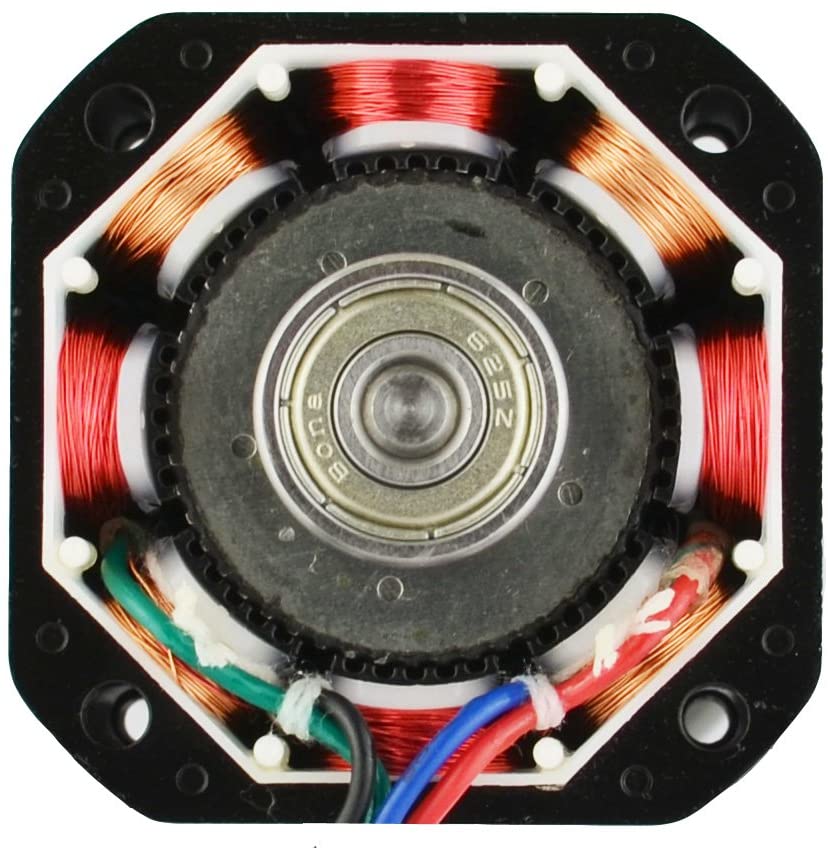
Cuando la corriente fluye a través del devanado del estator, el devanado del estator genera un campo magnético vectorial. Este campo magnético hará que el rotor gire en un cierto ángulo de modo que la dirección del campo magnético del rotor sea consistente con la dirección del campo magnético del estator. Cuando el campo magnético vectorial del estator gira en un ángulo. El rotor también gira en ángulo con respecto a este campo magnético. Cada vez que se ingresa un pulso eléctrico, el motor gira un ángulo y avanza un paso. Su desplazamiento angular de salida es proporcional al número de pulsos de entrada y su velocidad de rotación es proporcional a la frecuencia del pulso. Cambie el orden en que se energizan los devanados y el motor invertirá la dirección. Por lo tanto, la rotación del motor paso a paso se puede controlar controlando el número de impulsos, la frecuencia y la secuencia de energización de cada devanado de fase del motor.
Los tipos comunes de motores tienen núcleos de hierro y bobinas en su interior. El devanado tiene resistencia y provocará pérdidas cuando se aplique electricidad. La magnitud de la pérdida es proporcional a la resistencia y al cuadrado de la corriente. Esto es lo que solemos llamar pérdida de cobre. Si la corriente no es una CC estándar o una onda sinusoidal, también se producirá una pérdida armónica; el núcleo de hierro tendrá histéresis. El efecto de las corrientes parásitas también produce pérdidas en el campo magnético alterno, y su tamaño está relacionado con el material, la corriente, la frecuencia y el voltaje. Esto se llama pérdida de hierro.
Tanto las pérdidas de cobre como de hierro aparecen en forma de calor, afectando la eficiencia del motor. Los motores paso a paso generalmente persiguen precisión de posicionamiento y salida de par, y su eficiencia es relativamente baja. La corriente es generalmente mayor y tiene mayor contenido armónico. La frecuencia de alternancia de corriente también cambia con el cambio de velocidad de rotación. Por lo tanto, es común que los motores paso a paso se calienten, más de lo normal.
El motor convierte la energía eléctrica en energía mecánica y el motor paso a paso es un elemento de control de bucle abierto que convierte señales de pulso eléctrico en desplazamiento angular o desplazamiento lineal. En condiciones sin sobrecarga, la velocidad del motor y la posición de parada solo dependen de la frecuencia y el número de pulsos de la señal de pulso y no se ven afectadas por los cambios de carga. En otras palabras, si se agrega una señal de pulso al motor, el motor girará en un ángulo escalonado. La existencia de esta relación lineal, sumado a las características del motor paso a paso que solo tiene errores periódicos y no errores acumulados. Hace que sea muy sencillo utilizar motores paso a paso para controlar la velocidad, la posición y otras áreas de control.
● Tamaño del motor paso a paso
Los motores paso a paso se clasifican por tamaño de estructura, como "Nema 17" o "Nema 23". ¿Alguna vez te has preguntado cómo sucede esto o qué significa? La Asociación Estadounidense de Fabricantes Eléctricos establece estándares para muchos productos eléctricos, incluidos los motores paso a paso. En términos generales, "Nema 17" significa que la superficie de montaje del motor tiene 1,7 pulgadas cuadradas. Por lo tanto, las dimensiones del motor paso a paso Nema 23 son 2,3 pulgadas cuadradas. O 57mm como se muestra a continuación.
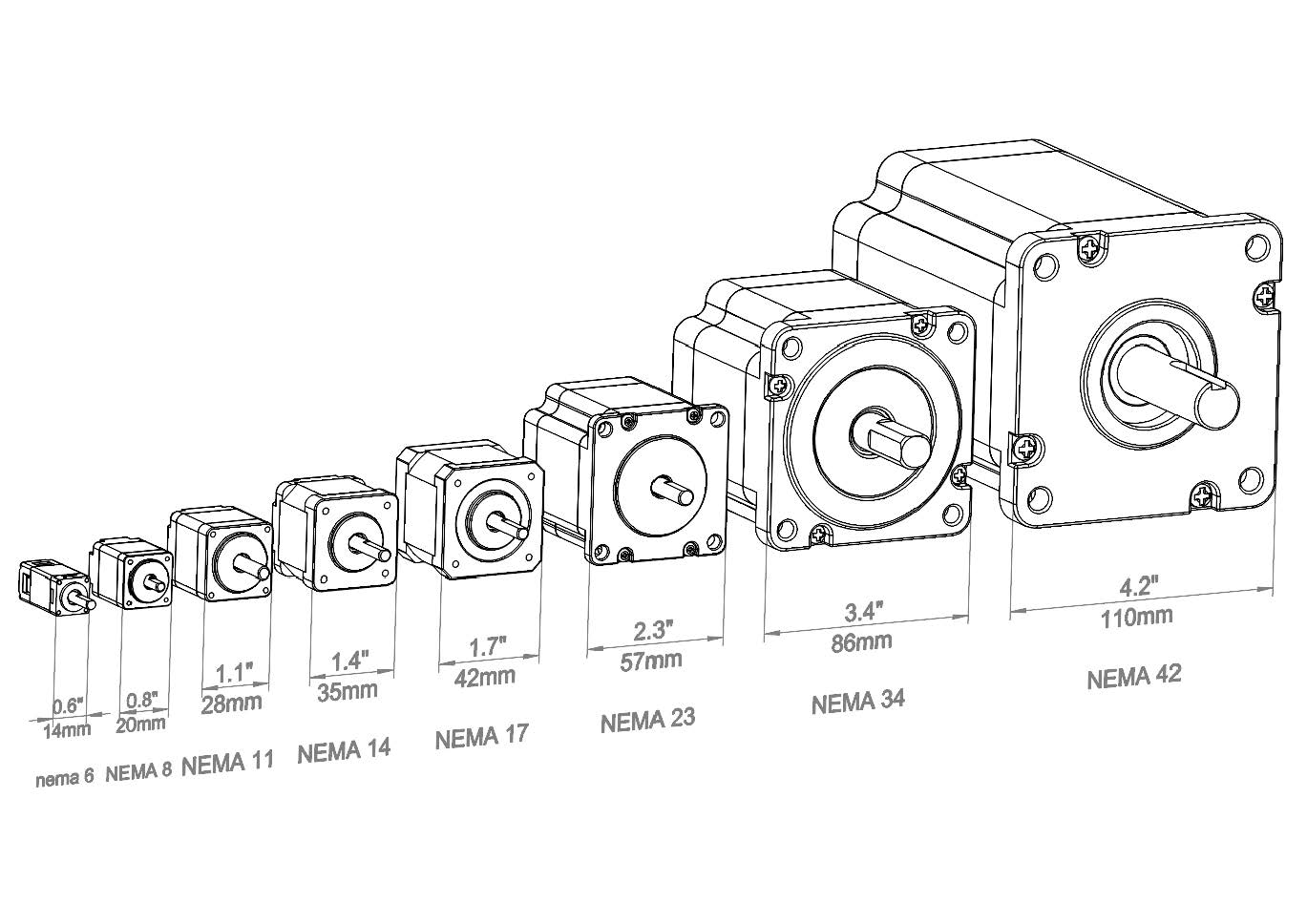
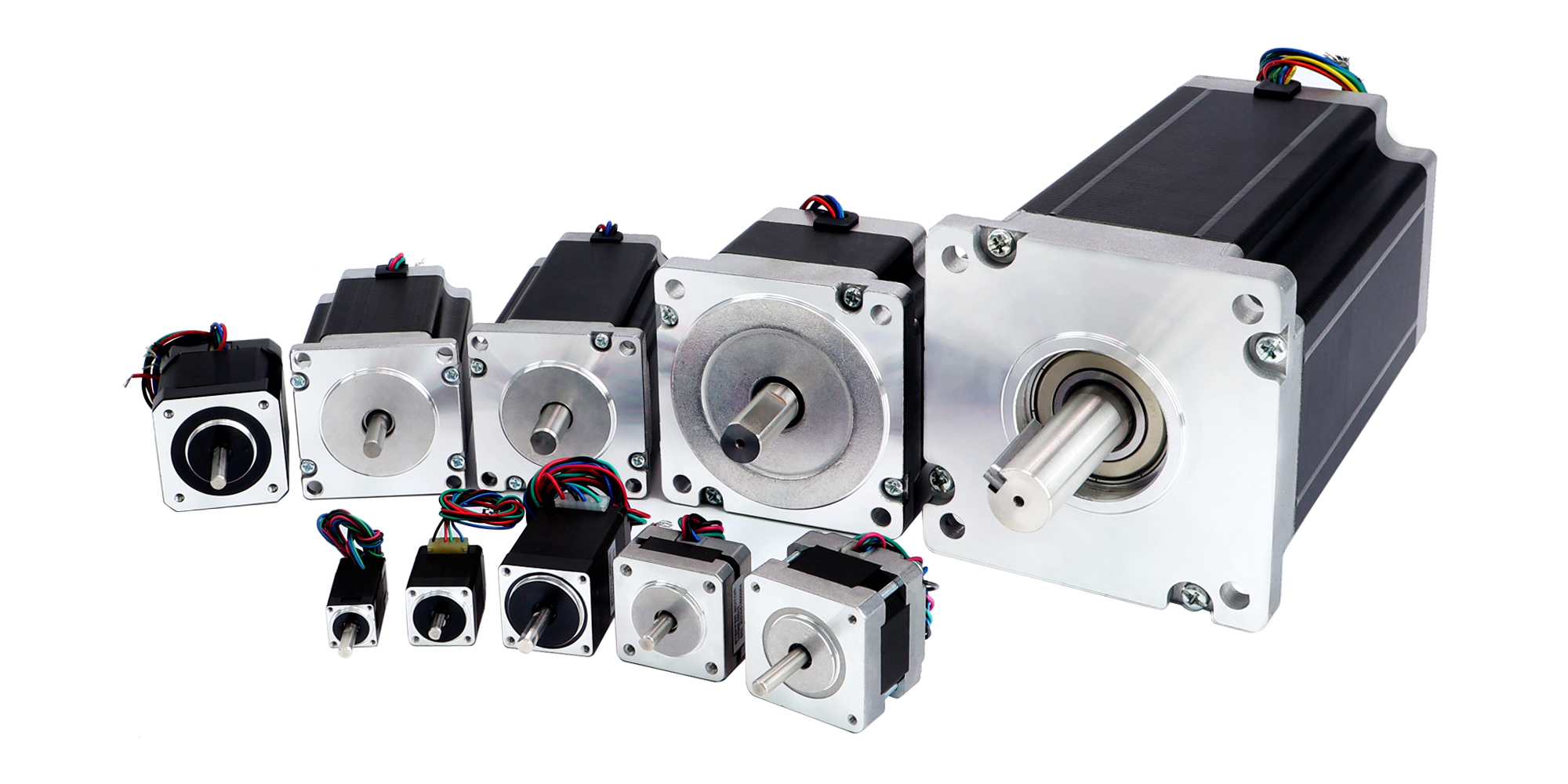
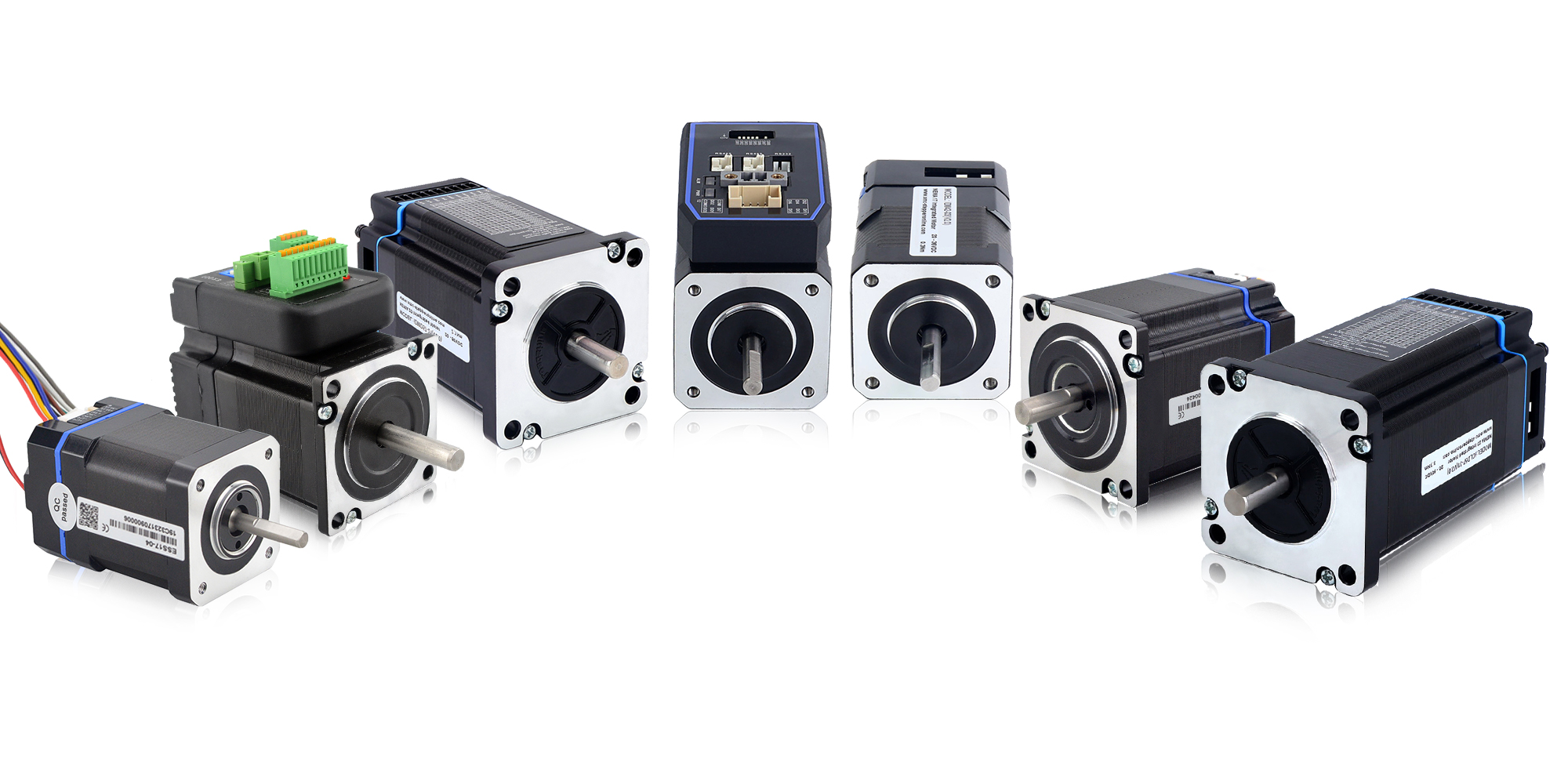
La foto a continuación incluye motores paso a paso Nema tamaño 06, 08, 11, 14, 17, 23, 24, 34 y 42. El tamaño 24 es un poco anómalo: no existe una definición Nema oficial para el tamaño 24. Se monta de manera similar al tamaño 23, pero es un poco más ancho (aprox. 4 mm), lo que permite el uso de rotores y estatores más grandes y, por lo tanto, aproximadamente un 30%. más torsión.

Básicamente, los fabricantes están de acuerdo con la norma propuesta. Esto brinda a los fabricantes una mayor flexibilidad de diseño porque saben de antemano que un motor Nema 17 se adaptará a otro soporte Nema 17 sin tener que rediseñar nada; especialmente si optan por cambiar de proveedor de motores.
● Tipos de motores paso a paso
Hay muchos tipos de motores paso a paso vendidos por STEPPERONLINE, y comprender las características y usos de los diferentes tipos de motores paso a paso le ayudará a decidir cuál es mejor para usted.
El motor paso a paso híbrido es una combinación de reluctancia variable y motor de imán permanente. El estator se estimula electromagnéticamente como un motor paso a paso de reluctancia variable, y el rotor del motor paso a paso está magnetizado axialmente como un motor paso a paso de imán permanente. Este motor paso a paso es un actuador que convierte impulsos eléctricos en desplazamiento angular.
En comparación con los otros dos tipos de motores paso a paso, los motores paso a paso híbridos proporcionan un par más alto con un ángulo de paso más pequeño y tienen una mejor propiedad dinámica. Con el desarrollo de la ciencia y la tecnología, especialmente el desarrollo de materiales magnéticos permanentes, tecnología de semiconductores y tecnología informática, estos motores paso a paso se han utilizado ampliamente en la automatización industrial, la robótica, las industrias textil y médica.
Un motor paso a paso de circuito cerrado es un motor paso a paso con un codificador agregado al final del motor para lograr un control de circuito cerrado. El control de circuito cerrado de un motor paso a paso es un servosistema que utiliza retroalimentación de posición y/o retroalimentación de velocidad para determinar el cambio de fase apropiado para la posición del rotor, lo que puede mejorar en gran medida el rendimiento del motor paso a paso sin perder pasos.
El motor paso a paso de circuito cerrado adopta una estructura de doble devanado y su motor utiliza un codificador lineal de alta precisión. Cada vez que el motor gira un cuadro, el codificador emitirá un pulso, de modo que se pueda obtener la posición de rotación precisa del motor, mientras que los motores paso a paso ordinarios solo tienen una posición de bobinado y rotación del motor no es confiable.

El motor paso a paso de circuito cerrado adopta control de enclavamiento, que requiere la entrada de un pulso de referencia. A través del control de retroalimentación, el pulso de control se puede sincronizar. La posición de rotación del motor se puede mantener constante, mientras que el motor paso a paso ordinario adopta un control de bucle abierto y no necesita ingresar un pulso de referencia. Solo es necesario controlar la frecuencia de paso y la dirección del motor, y la posición de rotación del motor es incontrolable.
En comparación con los motores paso a paso ordinarios, los motores paso a paso de circuito cerrado tienen mayores capacidades de respuesta dinámica y pueden lograr un control de posición rotacional preciso con pequeños errores de posición. Además, tiene una alta precisión y la precisión de la posición se puede controlar dentro de 0,1 grados, mientras que la precisión de la posición de los motores paso a paso ordinarios solo se puede controlar dentro de 1 grado, con poca estabilidad operativa y grandes errores de posición.
Además, los motores paso a paso de circuito cerrado tienen una mayor capacidad de carga y pueden soportar cargas mayores, mientras que los motores paso a paso normales tienen una menor capacidad de carga y una menor resistencia.
Los motores paso a paso integrados combinan motores y unidades paso a paso en una sola unidad. Los motores paso a paso integrados ofrecen un diseño que ahorra espacio, reduce el cableado y ahorra costos en comparación con los componentes separados del motor y del variador. Son ideales para aplicaciones como embalaje y etiquetado, pruebas y mediciones automatizadas, ensamblaje automatizado y ciencias biológicas.
Otros beneficios de integrar motores y unidades de accionamiento incluyen facilidad de implementación, menor complejidad del cableado, configuración y diseño del sistema más rápidos y compatibilidad garantizada con el motor.
● Motor paso a paso de imán permanente
Los motores de imanes permanentes utilizan un imán permanente (PM) en el rotor y funcionan con la atracción o repulsión entre el imán del rotor y los electroimanes del estator. El rotor del motor paso a paso de imán permanente está hecho de acero de imán permanente. El estator del motor paso a paso se procesa en un polo dentado en forma de garra mediante el método de estampado, y el rotor adopta un acero magnético de imán permanente con magnetización radial multipolar. El campo magnético generado por la dirección de la corriente de la bobina es mutuamente excluyente con el campo magnético del rotor, de modo que el motor gira en sentido inverso.
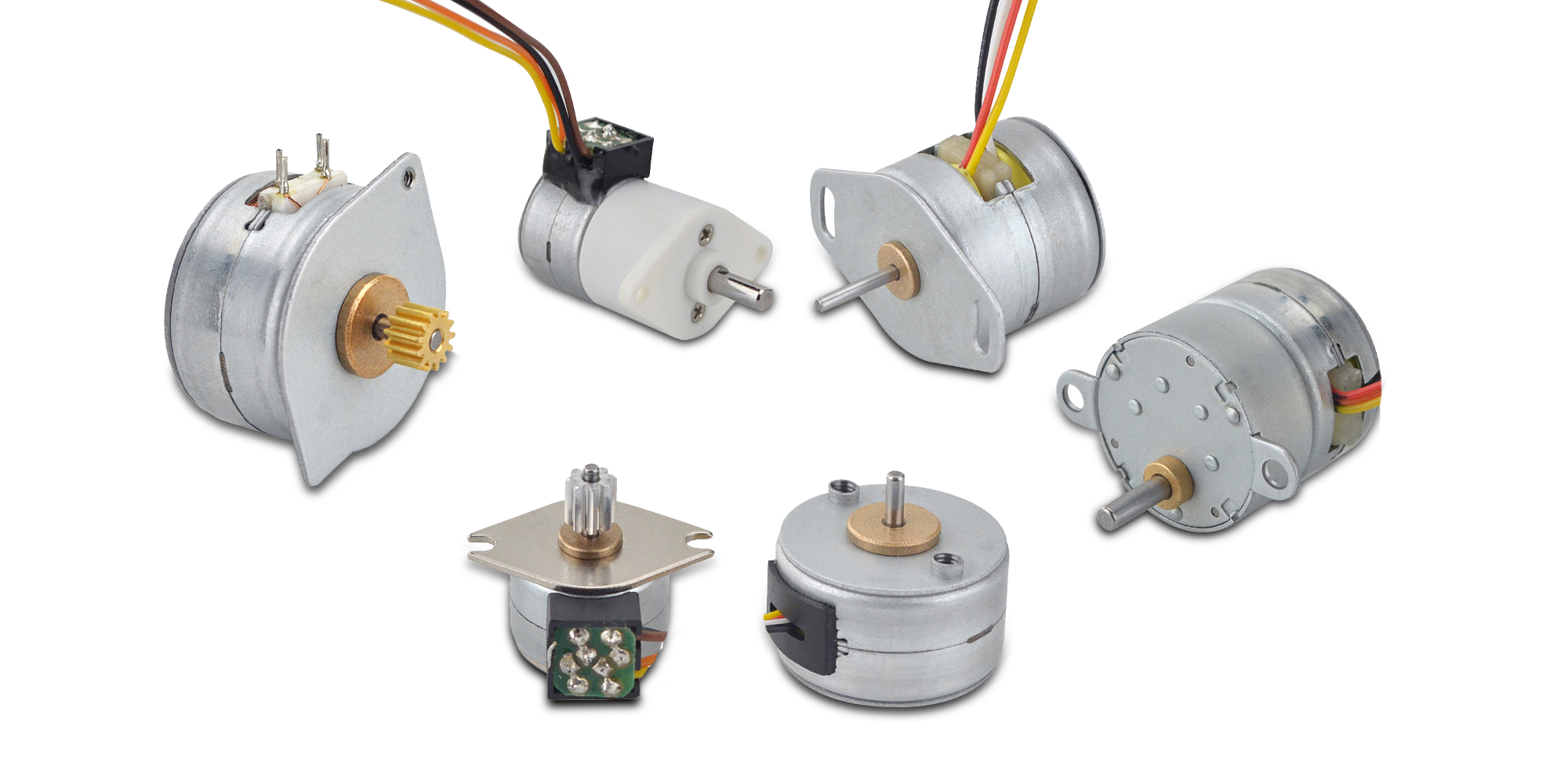
Este motor paso a paso también se conoce como motor paso a paso pm, la dirección axial de todo el estator y el rotor del motor está dividida en dos secciones, y la mitad está separada por una pieza de separación magnética. Las dos secciones están separadas entre sí por un ángulo escalonado y cada una consta de un estator, un rotor y un devanado anular encamisado sobre el estator. El motor paso a paso pm se utiliza principalmente en equipos periféricos de computadora, sistemas fotográficos, dispositivos de combinación optoelectrónicos, control de válvulas, reactores nucleares, terminales bancarias, máquinas herramienta CNC, máquinas de bobinado automático, relojes electrónicos y equipos médicos, etc.
● Motor paso a paso de reluctancia variable
Un motor paso a paso de reluctancia variable es un tipo de motor eléctrico que funciona según el principio de reluctancia magnética. Este motor está construido con un rotor de hierro y varios devanados del estator. Los devanados se magnetizan en una secuencia específica, lo que hace que el rotor se mueva en pasos discretos.
Los motores paso a paso de reluctancia variable proporcionan altas velocidades de paso y buen par a bajas velocidades. Sin embargo, a velocidades más altas el rendimiento puede ser menos satisfactorio debido a problemas de resonancia.
Los motores paso a paso de reluctancia variable se consideran resistentes y confiables, lo que los hace adecuados para entornos donde el motor puede estar sujeto a condiciones duras.
Una de las principales desventajas de los motores paso a paso de reluctancia variable es que tienden a ser más ruidosos que otros tipos de motores paso a paso. Esto se debe a que el rotor está mal amortiguado, lo que genera mayores niveles de vibración mecánica.
● Motores paso a paso lineales
Los motores paso a paso lineales son un tipo especial de motor paso a paso cuyo diseño y principios de funcionamiento son diferentes de los motores paso a paso rotativos tradicionales. Un motor paso a paso lineal es un motor lineal que logra un desplazamiento lineal mediante un movimiento lineal en lugar del movimiento de rotación logrado por los motores paso a paso tradicionales. La estructura de un motor paso a paso lineal generalmente consta de un estator fijo y un control deslizante móvil. El estator está equipado con bobinas en su interior y el control deslizante está equipado con imanes permanentes. Cuando la corriente pasa a través de la bobina del estator, se genera un campo magnético. La interacción entre el imán permanente del control deslizante y el campo magnético del estator genera una fuerza de atracción o repulsión, lo que hace que el control deslizante se mueva linealmente sobre el eje fijo. Controlar un motor paso a paso lineal es similar a un motor paso a paso tradicional. Al controlar la dirección y magnitud de la corriente, se puede controlar la posición y velocidad del control deslizante. La señal de pulso de cada motor paso a paso mueve el control deslizante en un paso fijo, de modo que se puede lograr un desplazamiento lineal preciso.

Hay tres tipos comunes de motores paso a paso lineales: accionamiento externo, eje pasante y eje fijo. Se puede seleccionar según los indicadores clave de aplicaciones específicas. Los motores paso a paso lineales tienen las ventajas de alta precisión, transmisión sin juego y respuesta rápida, por lo que se prefieren en aplicaciones que requieren control de movimiento lineal de alto rendimiento.
● Unipolar frente a bipolar
Un motor paso a paso es un motor que controla el ángulo de rotación a través de pulsos eléctricos. Los motores paso a paso bipolares y los motores paso a paso unipolares son dos tipos comunes de motores paso a paso. La principal diferencia entre ellos es el método de control. Un motor paso a paso bipolar necesita invertir la corriente para cambiar la dirección del rotor, por lo que requiere 4 electrodos para controlar la dirección, cada electrodo tiene dos estados (ON/OFF).
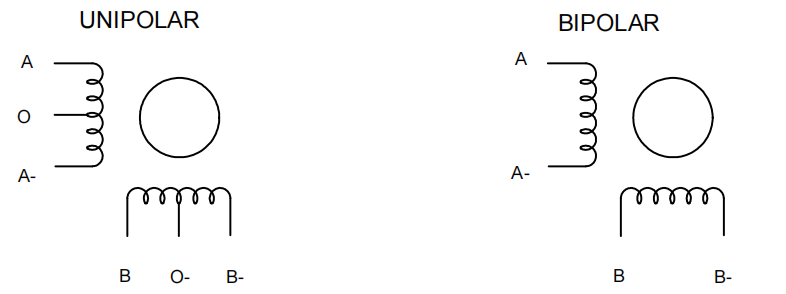
Un motor paso a paso unipolar solo necesita dos electrodos para controlar la rotación del rotor, y el motor gira cambiando la dirección de la corriente. Por lo tanto, en comparación con los motores paso a paso bipolares, los motores paso a paso unipolares solo necesitan 2 electrodos para lograr el mismo control de movimiento. Sin embargo, dado que los motores paso a paso unipolares requieren la adición de un controlador unipolar en el circuito de control, la complejidad del circuito es ligeramente mayor.
Los motores paso a paso bipolares y los motores paso a paso unipolares tienen cada uno sus propias ventajas y desventajas, y el motor apropiado se puede seleccionar de acuerdo con el escenario de aplicación específico.
Las ventajas de los motores paso a paso bipolares son un gran par, una velocidad rápida, una alta precisión y un control simple, por lo que a menudo se utilizan en situaciones donde se requiere un control de alta velocidad y alta precisión. El par y la precisión de los motores paso a paso unipolares se comparan con los de los motores paso a paso bipolares. El motor es peor y más lento. Además, los controladores utilizados en los motores paso a paso unipolares son costosos y tienen menos opciones.
● ¿Cómo elegir el motor paso a paso, el controlador y la fuente de alimentación?
Los motores paso a paso son una buena opción cuando necesitas controlar el movimiento. Se pueden utilizar en escenarios donde se requiere control del ángulo de rotación, velocidad, posición y sincronización.
Entonces, cuando elegimos un motor paso a paso, hay varios factores que deben tenerse en cuenta.
1. ¿Cómo se acopla el motor a la carga?
Después de determinar el tipo de acoplamiento entre el motor y la carga, puede seleccionar un motor paso a paso según la longitud, el diámetro y el tipo de eje. Actualmente, los motores paso a paso estándar STEPPERONLINE tienen una variedad de longitudes de eje, diámetros de eje y tipos de eje, y pueden proporcionar varios servicios personalizados para el eje del motor.2. ¿A qué velocidad debe moverse o acelerarse la carga?
Al elegir el motor adecuado, es necesario tener en cuenta el equilibrio entre velocidad y carga. Para algunos equipos que requieren movimientos rápidos, podemos elegir motores de alta velocidad, pero si la carga es mayor, debemos elegir un motor con mayor torque. Por lo tanto, al seleccionar un motor, se debe considerar el equilibrio entre velocidad y carga de acuerdo con las necesidades reales, y elegir un motor que pueda satisfacer tanto la velocidad de movimiento como la carga. La siguiente es la velocidad máxima y la velocidad recomendada de cada tamaño de motor en condiciones sin carga.
| Velocidad sin carga | |||
| Tipo de motor | Dimensiones(mm) | Máx. Velocidad (rpm) | Velocidad de trabajo recomendada (rpm) |
| Motor de circuito abierto | Nema 6(14x14) | 1000 | 100-600 |
| Nema 8(20x20) | 1000 | 100-600 | |
| Nema 11(28x28) | 1000 | 100-600 | |
| Nema 14(35x35) | 1000 | 100-600 | |
| Nema 16(40x40) | 1000 | 100-500 | |
| Nema 17(42x42) | 1000 | 100-500 | |
| Nema 23(57x57) | 1000 | 100-500 | |
| Nema 24(60x60) | 1000 | 100-500 | |
| Nema 34(86x86) | 1000 | 100-400 | |
| Nema 42(110x110) | 500 | 100-300 | |
| Motor de circuito cerrado | Nema 8(20x20) | 2000 | 100-1500 |
| Nema 11(28x28) | 2000 | 100-1500 | |
| Nema 14(35x35) | 2000 | 100-1000 | |
| Nema 17(42x42) | 2000 | 100-1000 | |
| Nema 23(57x57) | 1500 | 100-1000 | |
| Nema 24(60x60) | 1500 | 100-1000 | |
| Nema 34(86x86) | 1500 | 100-1000 | |
También puede determinar si el motor cumple con sus requisitos de velocidad de carga según el diagrama de curva del motor.
3. ¿Cuánto torque se requiere para mover la carga?
La mayoría de los motores tienen clasificaciones de torque. Esto es lo que debes mirar para decidir si el motor tiene la fuerza para hacer lo que quieres. El par de retención de un motor paso a paso es similar a la "potencia" de un motor convencional. Sin embargo, la estructura física de los motores paso a paso es completamente diferente a la de los motores de CA y CC, y la potencia de salida del motor varía según la velocidad, la corriente y el voltaje de entrada.
En términos generales, si el par requerido es inferior a 0,8N.m, elija Nema 8 (20x20 mm), Nema 11 (28x28 mm), Nema 14 (35x35 mm), Nema 16 (39x39 mm), Nema 17 (42x42 mm); Si el par es de aproximadamente 1 N.m, elija un motor paso a paso Nema 23. Si el par es superior a varios N.m, debe elegir un motor paso a paso con especificaciones como Nema 34 y Nema 42.
4. ¿Qué precisión se requiere al posicionar una carga?
La precisión de los motores paso a paso aumenta cuando los pasos son más pequeños. Esto se debe a que una revolución se divide en pasos más cuidadosos y numerosos que dejan menos margen de error. Un motor paso a paso con un ángulo de 0,9°, por ejemplo, ofrece una mayor precisión que un motor paso a paso con un ángulo de 1,8°.
Un error común es pensar que los motores de 1,8° que funcionan a semipasos lograrán la misma precisión que los motores paso a paso de 0,9° que funcionan a pasos completos. Otro concepto erróneo es que se pierde par cuando se utiliza un motor paso a paso de 0,9°. Estas suposiciones son incorrectas y una comprensión de las características del diseño mecánico puede explicar por qué.
En general, los motores paso a paso de 0,9° son los más adecuados para aplicaciones de alta velocidad y alta precisión. Por el contrario, los motores paso a paso de 1,8° ofrecen un par mayor pero una precisión menor. También están disponibles motores paso a paso de 0,9° con un diseño patentado de 12 polos. Estos motores más avanzados combinan las características de los motores de 0,9° y 1,8° y ofrecen alta precisión y mayor par.
● Elija el controlador del motor paso a paso
Para aprovechar al máximo su motor paso a paso, debe utilizar el controlador adecuado. A la hora de seleccionar un controlador, hay tres elementos clave a tener en cuenta: voltaje, corriente, micropasos y número de fases. Cada uno juega un papel importante en el rendimiento del motor. No tener en cuenta estos parámetros puede provocar un rendimiento deficiente, un ruido más fuerte o incluso un sobrecalentamiento y falla del motor, lo que resulta en una pérdida de tiempo de producción y un aumento de los costos de mantenimiento.
1. Tensión nominal
Exceder el voltaje nominal máximo del motor o operarlo con un voltaje de suministro más alto puede provocar un mal funcionamiento del motor. Por este motivo, debe conocer la tensión nominal máxima o la tensión nominal típica del motor a partir de la descripción del producto o de la curva de par al seleccionar un controlador de motor paso a paso. Los motores paso a paso suelen funcionar con controladores que funcionan con CA (120 V o 240 V) o CC de bajo voltaje (como 24V, 36V o 48V). Si hace funcionar un motor a un voltaje superior al especificado, como un motor clasificado para 24V CC, a alto voltaje, el motor se sobrecalentará rápidamente. Por el contrario, un motor que funciona a un voltaje demasiado bajo (por ejemplo, un motor de alto voltaje que funciona a 24VCC) producirá menos energía y puede provocar que el motor se cale si no se reduce la carga.
2. Clasificación actual
Asegúrese de que el controlador sea adecuado para un amplio rango de corriente para que pueda probar el sistema en diferentes voltajes que sean adecuados para su aplicación. Para la clasificación actual, debe considerar tanto la corriente continua o efectiva como el requisito de corriente máxima. En los motores de CC con y sin escobillas, la fuerza electromagnética trasera no está presente durante el arranque y la parada y el conductor solo ve la resistencia del devanado del motor. Por lo tanto, se produce un aumento de corriente antes de que el motor gire y genere una fuerza electromagnética inversa opuesta a la tensión de alimentación, lo que reduce el consumo de corriente. Incluso si su aplicación solo requiere un máximo de 1 A de corriente continua durante el funcionamiento normal, es posible que tenga que procesar de 2 a 3 veces o incluso más corriente continua durante el arranque y la detención.
3. Micropasos
Los motores paso a paso se mueven en pasos que normalmente son de 1,8°, es decir, 200 pasos por revolución. Esto puede ser un problema si necesitamos pequeños movimientos. Una opción sería utilizar algún tipo de caja de cambios, pero existe otra opción: los micropasos. Microstepping significa que podemos tener más de 200 pasos por revolución y por tanto movimientos más pequeños.
Cuando se operan motores paso a paso con pasos completos, la salida del controlador del motor paso a paso parece una señal de onda cuadrada y genera movimientos gruesos. Cuanto más grandes son los micropasos, más se parece la señal de salida a una onda sinusoidal y el motor paso a paso se mueve más suavemente. Sin embargo, esto también tiene una desventaja. A medida que aumenta el valor del micropaso, el par cae bruscamente y, si el valor es demasiado grande, el motor no puede generar suficiente par para girar. Normalmente, se pueden usar 1/4, 1/8 o incluso 1/16 para lograr movimientos satisfactoriamente suaves y aun así generar suficiente torque.
4. Número de fases
Los controladores de motores paso a paso se utilizan para controlar un número específico de fases. Para los motores paso a paso unipolares y bipolares típicos, se utilizan accionamientos bifásicos, pero los motores de reluctancia variable utilizan accionamientos trifásicos. Antes de seleccionar el controlador, confirme el número de fase del motor.
● Elija la fuente de alimentación
Cuando utilices un motor paso a paso, necesitarás una fuente de alimentación para alimentar el motor paso a paso. Una fuente de alimentación adecuada puede hacer que su motor paso a paso funcione con un rendimiento óptimo. En cambio, una fuente de alimentación incorrecta puede causar un bajo rendimiento o un mayor desperdicio de energía.
A continuación se ofrecen algunos consejos para elegir la fuente de alimentación:
| Tamaño del motor | Voltaje impulsor |
| Nema 8 - Nema 17 | 12 - 24VDC |
| Nema 23, Nema 24 | 24 - 48VDC |
| Nema 34 | 48 - 100VDC/30 - 70VAC |
| Nema 42 - Nema 52 | 110 - 220VAC |
- Confirma la corriente nominal del motor. Puede encontrarlo en la hoja de datos del motor.
- Confirme el voltaje de conducción. El voltaje de conducción es el factor principal a la hora de elegir una fuente de alimentación. Normalmente, un voltaje más alto tendrá un mejor rendimiento.
La siguiente tabla muestra el voltaje recomendado para motores paso a paso. Puede elegir el voltaje correcto según su aplicación.
Calcule el valor de potencia. Le proporcionamos una fórmula sencilla:
P=n*I*V*1.2P: Valor de potencia
n: Número de motores paso a paso
I: Corriente nominal del motor
V: voltaje de conducción
1.2: significa 20% del margen
por ej. 3 unidades de motores con una corriente nominal de 3A cada uno y un voltaje de conducción de 36V, la potencia estimada es de aproximadamente: 3*3A*36V*1,2 = 388,8 W. entonces, puedes elegir un proveedor de energía de 36V 400W
Tenga en cuenta: la fórmula es solo un valor estimado de potencia, diferentes condiciones de trabajo necesitarán una potencia diferente. Por ejemplo, en un sistema de 3 ejes, no los 3 motores funcionan al mismo tiempo, ni los 3 motores funcionan con carga máxima, etc. En esta condición, el valor de potencia puede ser menor que el valor calculado mediante la fórmula.
● Ventajas y desventajas de los motores paso a paso
Ventajas de los motores paso a paso
- Debido a su estructura interna, los motores paso a paso no requieren sensores para detectar la posición del motor. Dado que el motor se mueve en "pasos", la posición del motor en un momento determinado se puede determinar simplemente contando estos pasos.
- Los motores paso a paso también son muy fáciles de controlar. Aunque el motor requiere un controlador, no requiere cálculos ni configuraciones complejos para funcionar correctamente. En general, la cantidad de trabajo necesaria para el control es menor en comparación con otros motores. Con el método de micropasos, puede lograr una alta precisión de posicionamiento de hasta aproximadamente 0,007°.
- Los motores paso a paso ofrecen un gran par a baja velocidad, son excelentes para mantener la posición y tienen una larga vida útil.
- El rotor del motor paso a paso tiene una gran masa y una gran inercia. Es propenso a vibraciones y ruidos durante el funcionamiento a alta velocidad, lo que afecta la estabilidad y precisión del movimiento. Esta es una desventaja importante de los motores paso a paso y es necesario tomar medidas para mitigar o eliminar este efecto.
- El principio de funcionamiento del motor paso a paso es controlar la posición y la velocidad mediante un control de pulso instantáneo a corto plazo. El funcionamiento prolongado puede provocar fácilmente que el motor se caliente o incluso se queme. Para aplicaciones que requieren un funcionamiento continuo durante largos períodos de tiempo, es posible que los motores paso a paso no sean la mejor opción.
● Usos y aplicaciones del motor paso a paso
Debido a las características de los motores paso a paso, se utilizan en muchas aplicaciones que requieren un control de posición simple y la capacidad de mantener la posición, que incluyen:
1. Impresoras 3D
El motor paso a paso es uno de los componentes importantes de la impresora 3D. Dependiendo del tipo de impresora, se pueden utilizar para una variedad de aplicaciones. Por ejemplo, los motores paso a paso se utilizan para mover individualmente una extrusora o construir una plataforma a lo largo de los ejes x, y y z. Normalmente, el conjunto del extrusor está equipado con un motor paso a paso que introduce el filamento en el extrusor.
Los motores paso a paso son únicos porque pueden moverse a un intervalo conocido y luego permanecer en esa posición. Debido a que pueden mover objetos repetidamente a una posición fija, a menudo se usan en robots e impresoras.
Los motores paso a paso vienen en muchos tamaños. Los tamaños más utilizados en las impresoras 3D son NEMA 14, NEMA 17, NEMA 23 y NEMA 24.
2. Máquinas CNC
Los motores paso a paso son una opción alternativa a los servomotores y pueden proporcionar energía para la mayoría de los tipos de maquinaria CNC. Las aplicaciones CNC abarcan una amplia gama de procesos de fabricación en los que el software informático preprogramado controla el funcionamiento y el movimiento físico de las máquinas herramienta en fábricas y entornos de fabricación.Si bien los motores paso a paso en aplicaciones CNC a menudo se consideran una alternativa más "económica" que los servomotores, esto es una simplificación excesiva basada en conocimientos tecnológicos obsoletos y no siempre es estrictamente exacto en la actualidad. Los motores paso a paso tienden a ser más baratos que los servomotores para la misma potencia, pero las versiones modernas son igualmente versátiles. Como resultado, los motores paso a paso encuentran aplicaciones más extendidas y están presentes en una gama más amplia de máquinas y sistemas, desde máquinas herramienta hasta computadoras de escritorio y automóviles.
Los motores paso a paso CNC tienen una ventaja fundamental sobre los servomotores porque no requieren codificadores. Los servomotores son inherentemente más difíciles de entender y operar que los motores paso a paso, en parte porque incluyen codificadores, que son más propensos a fallar que muchos otros componentes de los servomotores confiables. Los motores paso a paso no necesitan codificadores, lo que en teoría los hace más fiables que los servomotores.
Además, los motores paso a paso tampoco tienen escobillas (a diferencia de los servomotores), lo que significa que no requieren reemplazo regular siempre que los rodamientos estén en buenas condiciones de funcionamiento.
3. Lentes de cámara
Los motores paso a paso se utilizan ampliamente en diversas aplicaciones dentro de la tecnología de cámaras de alta gama. Se pueden emplear para controlar estructuras internas extremadamente precisas, como el enfoque automático y los ajustes de apertura dentro de la lente. Además, los motores paso a paso encuentran aplicaciones en la carcasa y estructuras mecánicas externas de cámaras de seguridad y sistemas de monitoreo remoto.
En particular, los motores paso a paso, junto con los controles deslizantes eléctricos de la cámara, permiten un funcionamiento muy suave de los dispositivos de posicionamiento de la cámara. Esto significa que las lentes capturadas por dispositivos de seguridad se pueden sujetar de manera confiable, evitando posibles problemas de distorsión de la imagen causados por los movimientos físicos de la cámara alrededor de su campo de visión. Los motores paso a paso proporcionan varias características atractivas para los sistemas de posicionamiento de cámaras y videovigilancia, incluido el par máximo cuando está estacionario, tiempos de respuesta extremadamente precisos e instantáneos para todas las entradas de movimiento, repetibilidad constante de movimientos preprogramados y control simple de bucle abierto basado en tamaños de paso fijos. .
Además de lo anterior, los motores paso a paso también se utilizan en seguridad, robots de servicio, impresoras, escáneres, maquinaria textil, maquinaria de embalaje, unidades de disco compacto e iluminación inteligente, etc.