




















































Los motores paso a paso son una opción común en las aplicaciones de control de movimiento. Ya que pueden lograr un posicionamiento preciso sin necesidad de retroalimentación de posición si se operan correctamente. El actuador lineal de motor paso a paso utiliza una tecnología única y avanzada para integrar el par de tornillos y el motor paso a paso en una sola unidad. Los clientes no necesitan instalar acoplamientos cuando los usan, lo que no solo ahorra espacio de instalación, sino que también mejora efectivamente la eficiencia del ensamblaje del sistema. Por lo tanto, los actuadores lineales de motor paso a paso pueden ser una solución económica para el posicionamiento preciso de movimientos lineales.
En base a estos actuadores lineales, se pueden construir muchas estructuras diferentes en relación a ellos. Los actuadores lineales de motor paso a paso generalmente se pueden dividir en tres tipos según su construcción: externos, no cautivos y cautivos.

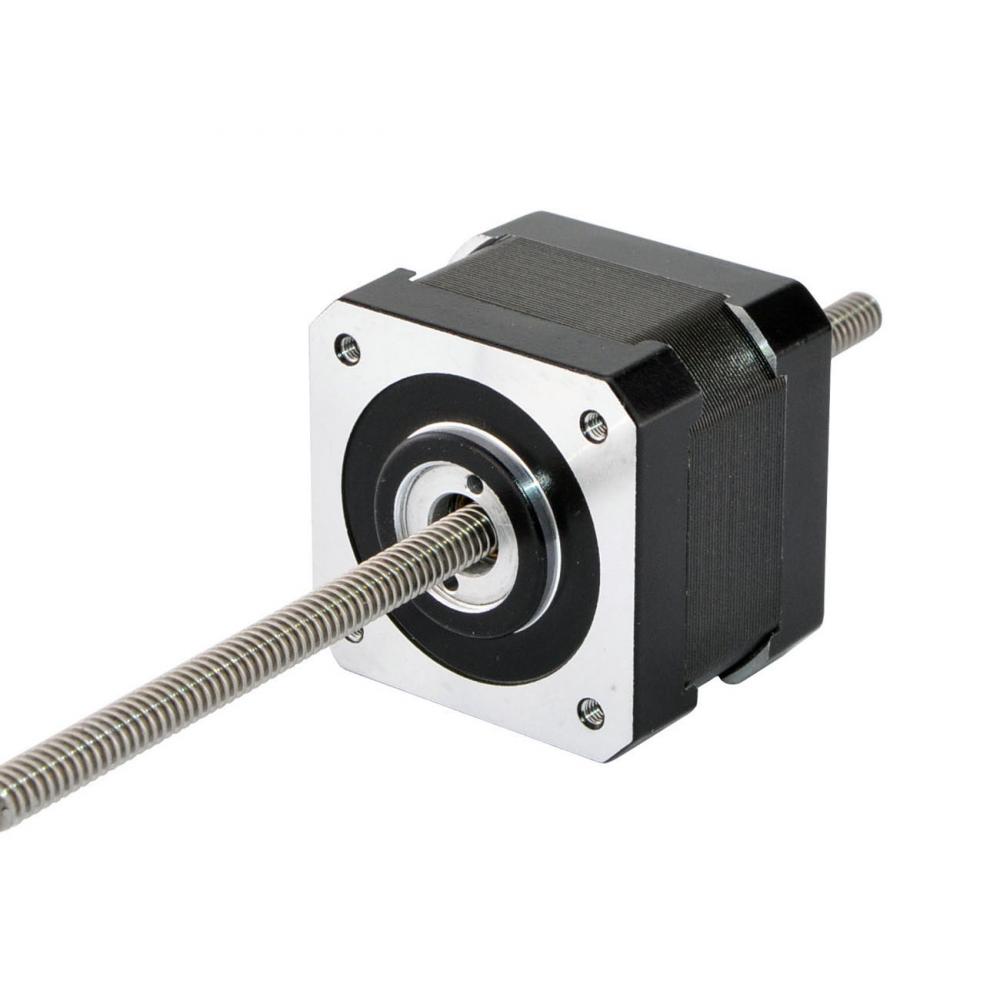
Características y aplicaciones del actuador lineal externo
El actuador lineal externo puede reemplazar al cilindro en algunas aplicaciones, con las ventajas de un posicionamiento preciso, velocidad controlable y alta precisión. Los actuadores lineales externos generalmente se eligen para sistemas de deslizamiento lineal con carreras de 60 a 500 mm. Sin embargo, un tornillo largo también puede causar problemas, ya que el actuador y el tornillo resuenan en ciertas posiciones de la carrera, lo que genera ruido. El uso de tecnología de accionamiento, como la subdivisión y el ajuste de aceleración y desaceleración, puede reducir el ruido, y el diseño del extremo del tornillo con soporte de cojinete también puede ayudar a reducir el ruido.
Características y aplicaciones del actuador lineal no cautivo
El actuador lineal no cautivo tiene sus ventajas únicas, que se reflejan principalmente en los siguientes 3 aspectos.
-
Permitir mayores errores de montaje del sistema
Los actuadores lineales no cautivos se utilizan normalmente para aplicaciones con una carrera de 30 a 200 mm. La ventaja de los actuadores lineales no cautivos sobre los actuadores lineales externos es que permiten mayores errores de tolerancia coaxial de montaje. Es probable que el tornillo y la tuerca de un módulo lineal provoquen el bloqueo del sistema si tienen un paralelismo deficiente con la guía. Aunque la tuerca permite un cierto juego radial, esto no es suficiente para todo el módulo, mientras que el juego radial de la tuerca de un actuador lineal no cautivo permite una inclinación del tornillo de 1゜. Las características estructurales de su diseño permiten mayores errores de montaje del sistema.
-
No limitado por la velocidad crítica del tornillo
Cuando se selecciona un actuador lineal externo para un movimiento lineal de alta velocidad, generalmente está limitado por la velocidad crítica del tornillo. Sin embargo, cuando se usa un actuador lineal no cautivo, el tornillo se configura para que sea fijo y antirrotación, y luego el motor se configura para accionar el control deslizante de la guía lineal. Como el tornillo es estacionario, no está limitado por la velocidad crítica del tornillo al alcanzar altas velocidades.
-
Ahorro de espacio de instalación
El actuador lineal no cautivo, por su diseño con la tuerca integrada en el motor, no ocupa espacio adicional en la longitud del tornillo externo. Se pueden montar varios motores en el mismo tornillo, los motores no pueden atravesarse y sus movimientos son independientes entre sí. Esto lo convierte en la opción adecuada para aplicaciones donde los requisitos de espacio son más estrictos.
La ventaja de los actuadores lineales no cautivos, como se mencionó anteriormente, es que permiten una cierta desalineación de la instalación, pero no solo son adecuados para aplicaciones con errores de instalación levemente grandes, sino también para aplicaciones como bombas de pistón donde se requiere un posicionamiento e instalación precisos. El diseño autocentrante del tornillo permite guiarlo para adaptarse a instalaciones con diferentes centros y también para evitar fuerzas laterales en el sello del pistón.
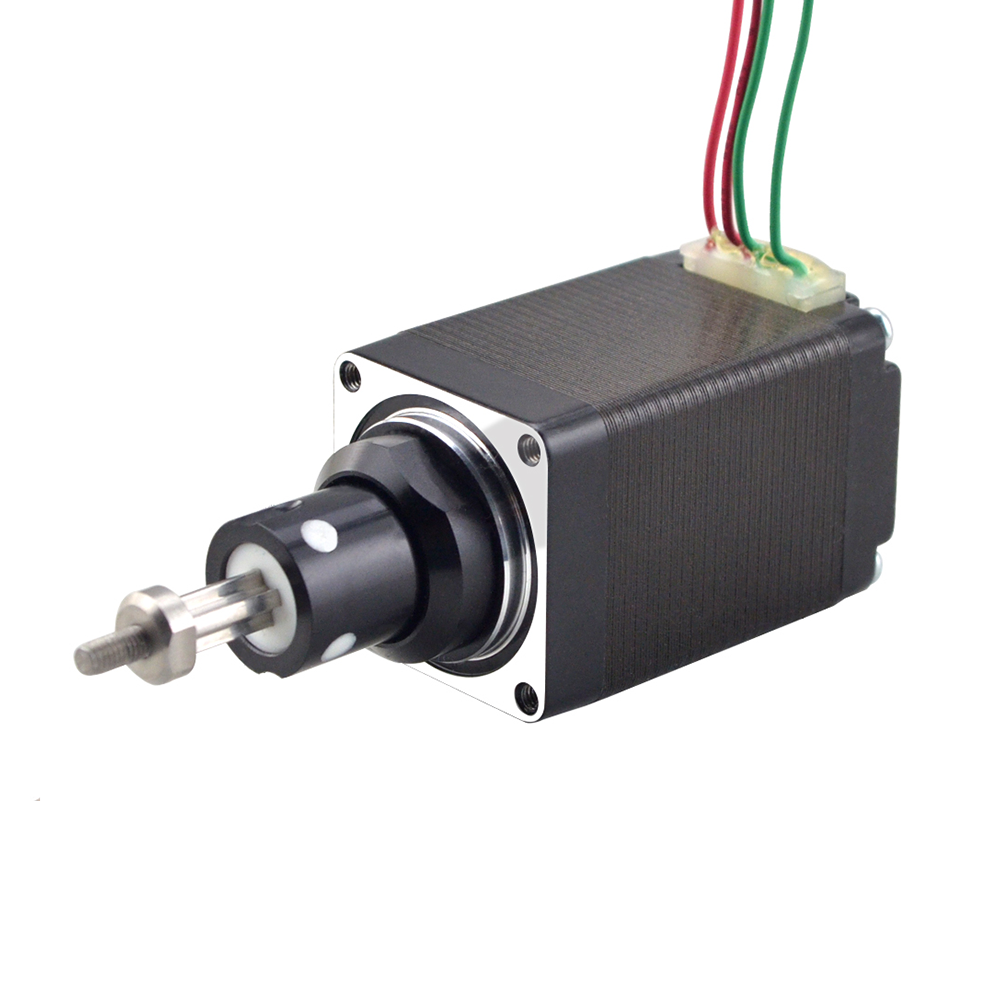
Características y aplicaciones del actuador lineal cautivo
Los actuadores lineales cautivos son recomendables para aplicaciones con requisitos de carrera corta, como menos de 50 mm, y donde no se puede proporcionar un mecanismo antirrotación de tuerca o tornillo. La ventaja del actuador lineal cautivo es que es compacto y no requiere un mecanismo antirrotación. El manguito estriado en la parte delantera del motor está moldeado y no puede soportar grandes fuerzas laterales, ya que está diseñado principalmente para limitar la acción de rotación del tornillo contra el motor. El diseño de estrías de bolas se puede utilizar para aplicaciones que requieren carga lateral, ya que el diseño de recirculación de bolas del manguito estriado aumenta la capacidad de carga lateral de los actuadores lineales cautivos.