
























































































Schrittmotoren sind eine gängige Option bei Bewegungssteuerungsanwendungen. Denn sie können bei korrektem Betrieb eine präzise Positionierung ohne Positionsrückmeldung erreichen. Der Linearaktuator mit Schrittmotor nutzt eine einzigartige und fortschrittliche Technologie, um das Schraubenpaar und den Schrittmotor in einer Einheit zu integrieren. Die Kunden ersparen sich dadurch den Einbau von Kupplungen, was nicht nur Platz spart, sondern auch die Effizienz der Systemmontage verbessert. Der Linearaktuator mit Schrittmotor kann daher eine wirtschaftliche Lösung für die genaue Positionierung von Linearbewegungen sein.
Auf der Grundlage dieser Linearaktuatoren können viele verschiedene Strukturen in Kombination mit ihnen gebaut werden. Schrittmotor-Linearaktuatoren lassen sich in der Regel nach ihrer Bauweise in drei Typen einteilen: external, non-captive and captive.

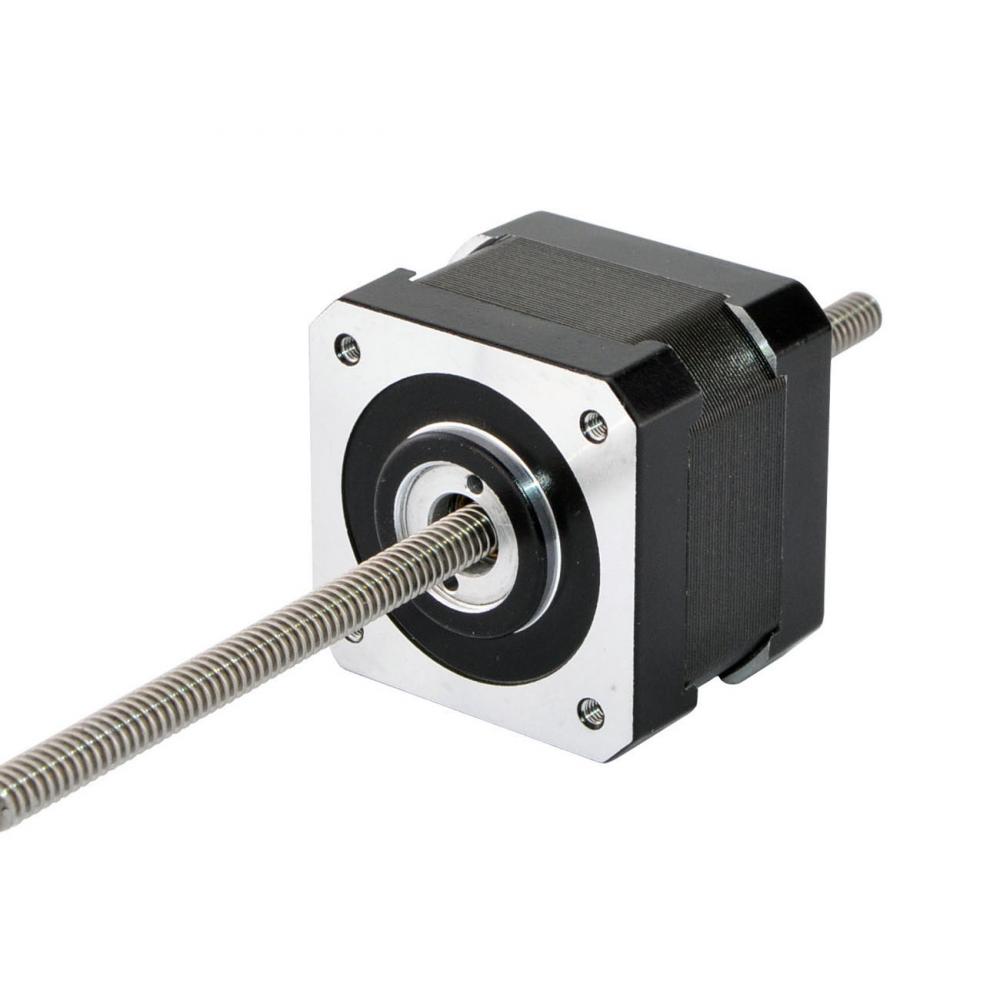
Merkmale und Anwendungen des externen Linearaktuators
Der externe Linearantrieb kann in einigen Anwendungen den Zylinder ersetzen und bietet die Vorteile einer präzisen Positionierung, kontrollierbaren Geschwindigkeit und hohen Genauigkeit. Externe Linearaktuatoren werden im Allgemeinen für lineare Gleitsysteme mit Hüben von 60 bis 500 mm gewählt. Eine lange Spindel kann jedoch auch Probleme verursachen, da der Aktuator und die Spindel an bestimmten Stellen des Hubs in Resonanz treten und dadurch Geräusche verursachen. Der Einsatz von Antriebstechnik wie Unterteilung und Einstellung der Beschleunigung und Verzögerung kann die Geräuschentwicklung verringern, und auch die Konstruktion des Spindelendes mit Lagerung kann zur Geräuschreduzierung beitragen.
Merkmale und Anwendungen des Non-Captive Linearaktuators
Der Non-Captive Linearaktuator hat seine einzigartigen Vorteile, die sich hauptsächlich in den folgenden 3 Aspekten widerspiegeln.
-
Größere Montagefehler des Systems zulassen
Die Non-Captive Linearaktuatoren werden typischerweise für Anwendungen mit einem Hub von 30-200 mm verwendet. Ein Vorteil von Non-Captive Linearaktuatoren gegenüber externen Linearaktuatoren ist, dass sie größere koaxiale Montagetoleranzen zulassen. Die Spindel und die Mutter eines Linearmoduls können zu einem Blockieren des Systems führen, wenn sie eine schlechte Parallelität mit der Führungsschiene aufweisen. Die Mutter lässt zwar ein gewisses radiales Spiel zu, das aber nicht für das gesamte Modul ausreicht, während das radiale Spiel der Mutter eines Non-Captive Linearaktuators eine Neigung der Spindel innerhalb von 1゜zulässt.
-
Nicht auf die kritische Geschwindigkeit der Schraube beschränkt
Wenn ein externer Linearaktuator für lineare Hochgeschwindigkeitsbewegungen ausgewählt wird, ist er normalerweise durch die kritische Geschwindigkeit der Spindel begrenzt. Bei der Verwendung eines Non-Captive Linearaktuators wird die Spindel jedoch so konfiguriert, dass sie feststeht und sich nicht dreht, und dann wird der Motor so eingestellt, dass er den Schlitten der Linearführung antreibt. Da die Schraube feststeht, ist sie beim Erreichen hoher Geschwindigkeiten nicht durch die kritische Geschwindigkeit der Schraube begrenzt.
-
Den Einbauraum einsparen
Dank seiner Konstruktion mit der im Motor eingebauten Mutter beansprucht der Non-Captive Linearaktuator keinen zusätzlichen Platz in der Länge der externen Spindel. Außerdem können mehrere Motoren auf der gleichen Spindel montiert werden, die Motoren können sich nicht gegenseitig durchdringen und ihre Bewegungen sind unabhängig voneinander. Dies macht sie zur geeigneten Wahl für Anwendungen, bei denen der Platzbedarf strenger ist.
Wie bereits erwähnt, hat der Non-Captive Linearaktuator den Vorteil, dass er ein gewisses Maß an Einbauabweichung zulässt. Er eignet sich jedoch nicht nur für Anwendungen mit etwas größeren Einbaufehlern, sondern auch für Anwendungen wie Kolbenpumpen, bei denen eine präzise Positionierung und Installation erforderlich ist.
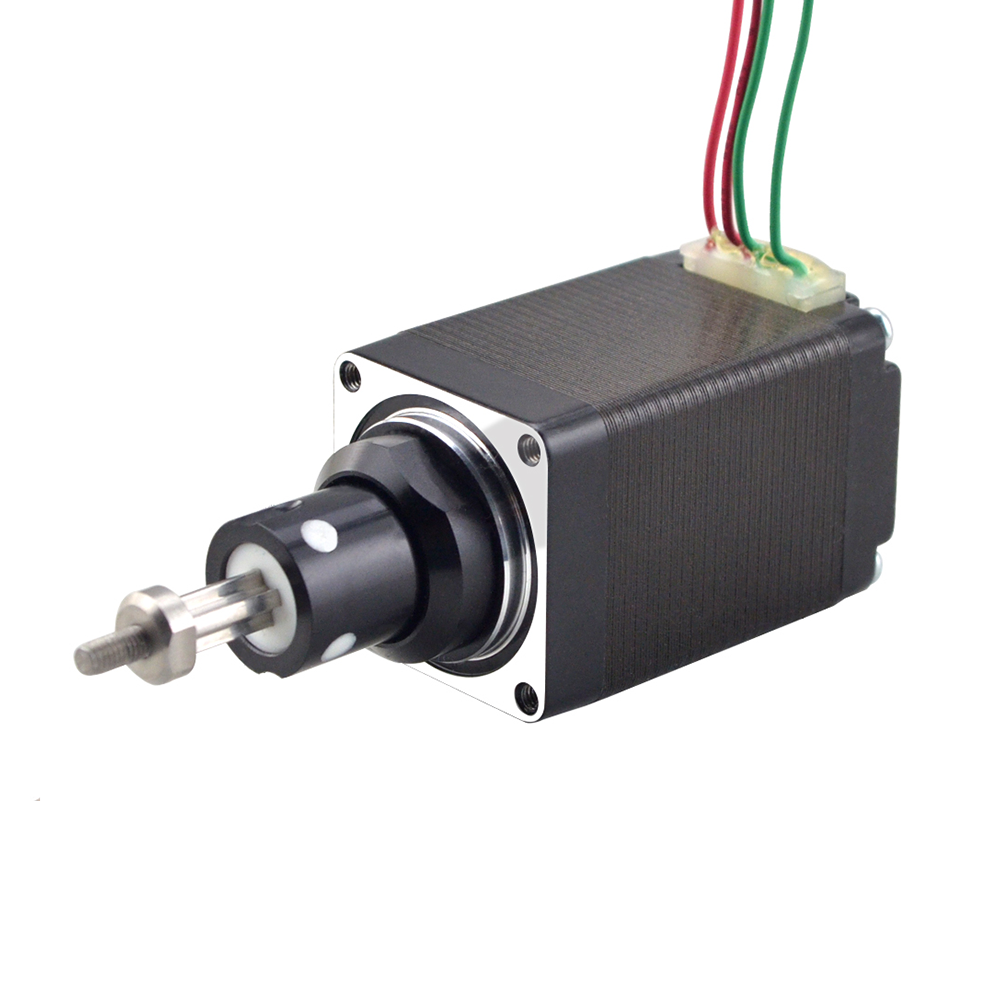
Merkmale und Anwendungen des Captive Linearaktuators
Für Anwendungen mit kurzen Hüben, z. B. weniger als 50 mm, und wenn keine Mutter oder Spindel als Verdrehsicherung vorgesehen werden kann, wird der Einsatz eines Captive Linearaktuaktors empfohlen. Der Vorteil des Captive Linearaktuaktors ist, dass er eine sehr kompakte Bauweise hat und keine Verdrehsicherung benötigt. Die Keilnutbuchse an der Vorderseite des Motors ist geformt und kann keinen großen seitlichen Kräften standhalten, da sie primär dazu dient, die Drehbewegung der Schraube am Motor zu begrenzen. Die Kugelkeilverzahnung kann in Anwendungen eingesetzt werden, bei denen seitliche Belastungen erforderlich sind, da die Kugelumlaufkonstruktion der Keilwellenhülse die seitliche Belastbarkeit des Captive Linearaktuaktors erhöht.
