





















































Een stappenmotor is een elektromechanisch apparaat dat elektrische energie omzet in mechanisch vermogen. Tegelijkertijd is een stappenmotor een borstelloze, synchrone motor die een volledige rotatie in een groot aantal stappen kan verdelen. Wanneer een stappenmotor wordt toegepast met elektrische commandopulsen in de juiste volgorde, draait de as of spil van de stappenmotor in discrete stappen, waardoor nauwkeurige controle van de positie van de motor mogelijk is zonder enig feedbackmechanisme, zolang de motor maar geschikt is voor de toepassing .
1. Constructie van stappenmotoren
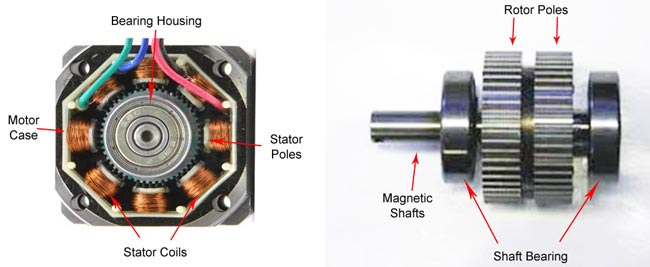
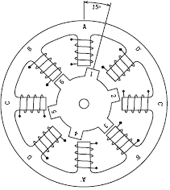
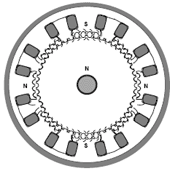
Stappenmotoren bestaan over het algemeen uit voor- en achtereindkappen, lagers, centrale as, rotorkern, statorkern, statorsamenstel, gegolfde ringen, schroeven en andere onderdelen . De twee belangrijkste onderdelen van een stappenmotor zijn de stator en de rotor. Ze zijn beide samengesteld uit magnetische materialen met respectievelijk zes en vier magnetische polen. De zes magnetische polen van de stator zijn voorzien van stuurwikkelingen en de twee tegengestelde polen vormen een fase.
2. Types of Stepper Motors
Er zijn drie basistypen stappenmotoren, reactieve rotor: stappenmotor met variabele weerstand (VR), actieve rotor: stappenmotor met permanente magneet (PM), combinatie van VR en PM: Hybride stappenmotor (HY)
Stappenmotoren met variabele reluctantie
Stappenmotoren met variabele reluctantie zijn het eenvoudigste type stappenmotor en bestaan uit een zachtijzeren rotor met meerdere tanden en een gewikkelde stator. Beide polen worden gemagnetiseerd wanneer gelijkstroom wordt toegepast op de statorwikkeling.
Wanneer de rotortanden worden aangetrokken door de bekrachtigde statorpolen, vindt er rotatie plaats. Omdat de magneten van stappenmotoren met variabele reluctantie kleiner en lichter zijn dan die van stappenmotoren met permanente magneten, zijn ze sneller. Hoe kleiner het gebied tussen de rotor en de statortandwielen van een stappenmotor met variabele weerstand, hoe kleiner het verlies aan magnetische kracht.
Voor dit type stappenmotor is de structuur, hoewel de structuur eenvoudig en gemakkelijk te controleren is, de resolutie is laag en het koppel is klein.
Permanente magneet stappenmotoren
Permanente magneten zijn ingebouwd in de motorstructuur van de permanente magneetstepper. De verandering van de rotorpositie zal worden veroorzaakt door een verandering in de stroomrichting in de spoelen, waardoor de magnetische polen veranderen. De rotor zal 90° draaien als de richting van de stroom correct wordt gewijzigd. Deze enkele stap van de motor zou, hoewel nuttig in sommige toepassingen, erg groot en onnauwkeurig zijn. Daarom hebben de werkelijk bestaande permanentmagneetmotoren meer rotorpolen en zijn er meerdere magneten op de rotor gemonteerd om het aantal stappen en de positioneringsprecisie te vergroten.
De gemagnetiseerde rotorpolen zorgen voor een grotere magnetische fluxintensiteit en als resultaat Permanente magneetmotoren vertonen betere koppelkarakteristieken dan stappenmotoren met variabele reluctantie. De eenvoudige constructie resulteert in een redelijk geprijsde motor met een vrij lage resolutie.
Hybride stappenmotoren
Hybride stappenmotoren zijn een van de meest voorkomende gebruikte soorten stappenmotoren in de industrie. Hybride stappenmotoren combineren de beste eigenschappen van stappenmotoren met variabele reluctantie en permanente magneet, waardoor ze duurder zijn. Hybride stappenmotoren bieden betere prestaties op het gebied van stapresolutie, koppel en snelheid.
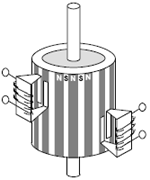
De rotor van een hybride stappenmotor bestaat uit permanente magneten, maar in tegenstelling tot de hierboven besproken modellen zijn de magneten niet radiaal gemonteerd maar axiaal gemagnetiseerd. Normaal gesproken bestaat de rotor uit twee tegenover elkaar liggende gemagnetiseerde ringen die op de motoras zijn geplaatst. In elke ring zijn sleufgroeven aangebracht om rotortanden te vormen.
Het aantal volledige stappen per omwenteling kan worden berekend met de volgende formule:
- SPR = NR x Ø
- Waarbij: SPR = aantal stappen per omwenteling
- NR = totaal aantal rotortanden (totaal voor beide jukken)
- Ø = aantal motorfasen
- of: NR = SPR/Ø
| Vergelijkingen | Stappenmotor met variabele reluctantie (VR) | Permanente magneet stappenmotor (PM) | Hybride stappenmotor (HB) |
| Kosten | Gemiddeld | Relatief goedkoop | Relatief duur |
| Ontwerpstructuur | Eenvoudig | Gemiddeld | Relatief complex |
| Resolutie | Staphoek: 1,8°, 0,9° of less | Staphoek: 3°~30° | Staphoek: 1,8°, 0,9° of minder |
| Koppelsnelheidscurve | Geen significante koppeldaling bij hoge snelheid | Groot koppel bij lage snelheid, aanzienlijke koppeldaling bij hoge snelheid | Groot koppel bij lage snelheid, aanzienlijke koppeldaling bij hoge snelheid |
| Ruis | Meer ruis | Minder ruis | Meer ruis (beter met microstap-onderverdeling) |
| Warmteopwekking | Hoge temperatuurstijging (koellichaam nodig) | Lage temperatuurstijging | Lage temperatuurstijging |
| Microstap-onderverdeling< /td> | Werken doorgaans alleen in volledige stap | Ferriet- of neodymium-ijzer-boormagneten | |
| Rotormateriaal | Siliconen staalplaat (geen permanente magneten) | Volledige stap, halve stap, microstap | Volledig stap, halve stap, microstap |
| Rotoroppervlak | Multi-tandstructuur op het buitenoppervlak van de rotor | Glad en tandloos | Multi-tandstructuur op het buitenoppervlak van de rotor |
| Magnetisch koppel | Genereert alleen aantrekkelijk koppel | Zowel aantrekkelijk als afstotend koppel tijdens bedrijf | Zowel aantrekkelijk als afstotend koppel tijdens bedrijf |
3. Soorten bedrading
Een andere classificatie van stappenmotoren is gebaseerd op het type wikkeling van de tweefasige motor. Stappenmotoren worden op basis van deze classificatie ingedeeld in unipolaire en bipolaire motoren.
Het belangrijkste verschil is dat unipolaire motoren werken met één stroom- (spannings)polariteit, terwijl bipolaire motoren werken met twee polariteiten, wat betekent dat de richting van de stroom in de spoelen is variabel. Een verder verschil is dat de motorspoelen moeten worden aangesloten om vermogen van het uiteinde van de ene spoel naar het begin van de andere over te brengen. Deze aansluitmethode maakt het mogelijk om één polariteit van de stroom (spanning) te gebruiken. Een bipolaire motor heeft een hoger koppel dan een unipolaire motor, maar de besturing ervan is ook ingewikkelder.
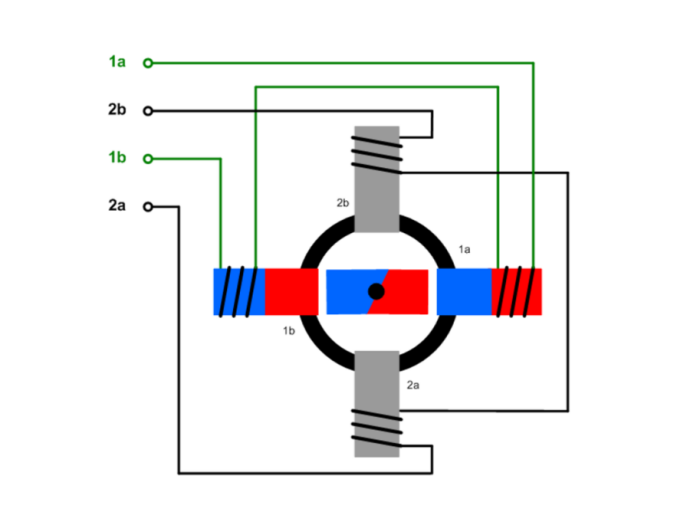
Bipolaire stappenmotor en de aansluiting van de wikkelingen
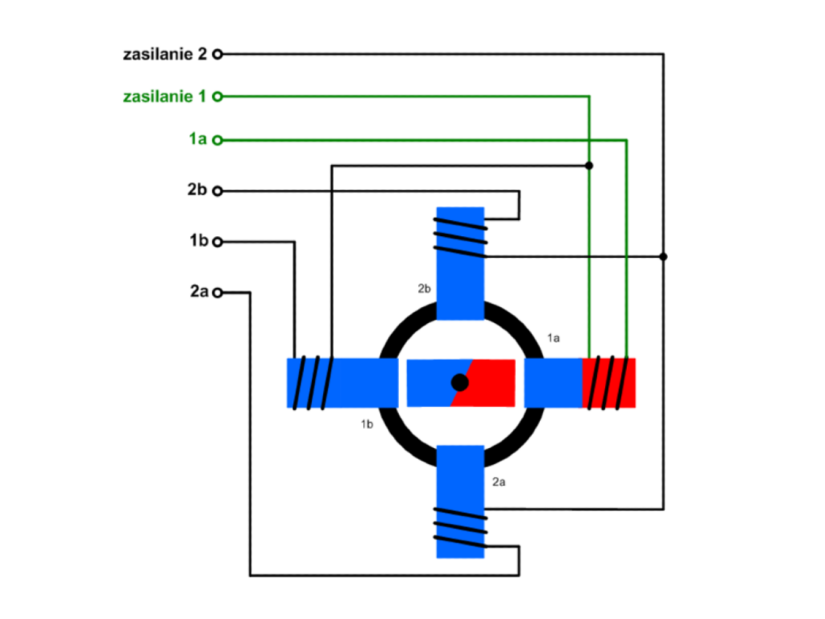
Unipolaire stappenmotor en de aansluiting van de wikkelingen
4. Voordelen van stappenmotoren
- Positionering - Omdat stappenmotoren in nauwkeurige, herhaalbare stappen bewegen, presteren ze goed in toepassingen die nauwkeurige positionering vereisen.
- Snelheidsregeling - Nauwkeurige bewegingsstappen zorgen voor een uitstekende controle van de snelheid.
- Torque bij lage snelheid - Stappenmotoren hebben een hoog koppel bij lage snelheden.
5. Nadelen van stappenmotoren
- Laag rendement ;- Vergeleken met DC-motoren gebruiken ze meer stroom. Daarom hebben ze de neiging heet te worden.
- Beperkt koppel bij hoge snelheid - Het koppel van de motor daalt snel naarmate de snelheid afneemt li>
- Geen feedback - Feedback wordt niet gebruikt om mogelijke gemiste stappen te specificeren
- Hoge niveaus van trillingen en geluid - Bij zeer hoge snelheden is de bediening van deze motor niet eenvoudig.
- < b>Mogelijk verlies van synchronisatie - Veroorzaakt door factoren zoals onverwachte veranderingen in belasting
- Klein koppel ten opzichte van de traagheidsverhouding
- Vereist een aandrijfcircuit
6. Waar worden stappenmotoren voor gebruikt?
Als zodanig zijn stappenmotoren een goede keuze voor toepassingen die lage snelheid en hoge nauwkeurigheid vereisen. Enkele van deze dagelijkse toepassingen worden hieronder opgesomd:
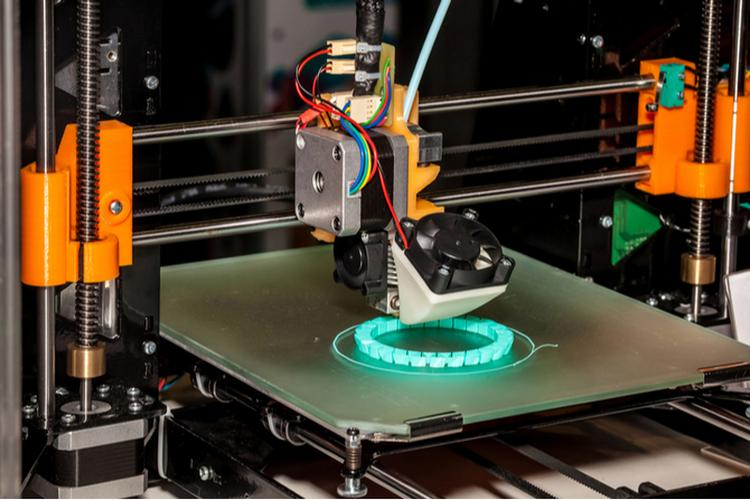
Stepper motors for 3D printers
Stappenmotoren zijn bijna altijd opgenomen in gewone 3D-printers. Het gebruik van stappenmotoren in 3D-printers maakt zeer nauwkeurige bewegingen en positionering mogelijk zonder de noodzaak van encoders en andere aanvullende software of sensoren op een kosteneffectieve manier. Stappenmotoren kunnen naar een bekend interval bewegen en die positie vervolgens vasthouden. Ze zijn een zeer geschikte motor om objecten naar herhaalbare posities te verplaatsen.
Afhankelijk van het type printer worden ze in verschillende toepassingen gebruikt. Er worden bijvoorbeeld stappenmotoren gebruikt om de extruder te verplaatsen of om de X-, Y- en Z-assen van het platform afzonderlijk te bewegen. De extruderconstructie heeft ook een stappenmotor die wordt gebruikt om het filament in de extruder te trekken en de levering van consistent, gelijkmatig materiaal aan de machine tijdens het hele printproces te regelen.
Stappenmotoren zijn verkrijgbaar in verschillende uitvoeringen maten. de meest voorkomende formaten die in 3D-printers worden gebruikt, zijn NEMA 14, NEMA 17, NEMA 23 en NEMA 24.
 Stepper motors for CNC
Stepper motors for CNC
Stappenmotoren zijn een alternatief voor servomotoren en kunnen de meeste soorten CNC-machines aandrijven. Stappenmotoren hebben een klein vloeroppervlak en een eenvoudig ontwerp, waardoor ze ideaal zijn voor kleine toepassingen zoals CNC-freesmachines. Stappenmotoren kosten minder dan servomotoren voor hetzelfde vermogen, maar moderne versies van stappenmotoren hebben vaak dezelfde kenmerken. Stappenmotoren zijn gemakkelijker te begrijpen en te bedienen vanwege de afwezigheid van encoders, en stappenmotoren zijn ook borstelloos en gemakkelijk te onderhouden.
Stappenmotoren kunnen doorgaans voedingssnelheden leveren van 50 tot 1.000 inch per minuut, terwijl servomotoren motoren kunnen meer dan 2.500 inch per minuut bereiken. Als u een zeer hoge nauwkeurigheid en hoge productiesnelheden nodig heeft, zijn servomotoren een betere keuze.
Voor toepassingen die geen ultrahoge precisie vereisen. De meeste CNC-freesmachines die minder dan $ 25.000 kosten, gebruiken stappenmotoren in plaats van servomotoren. Closed-loop stappenmotoren zijn ook het overwegen waard, ze zijn goed in het voorkomen van fouten als gevolg van gemiste stappen en kunnen een goede keuze zijn als u een budgetvriendelijke oplossing nodig heeft voor dure werkstukken.
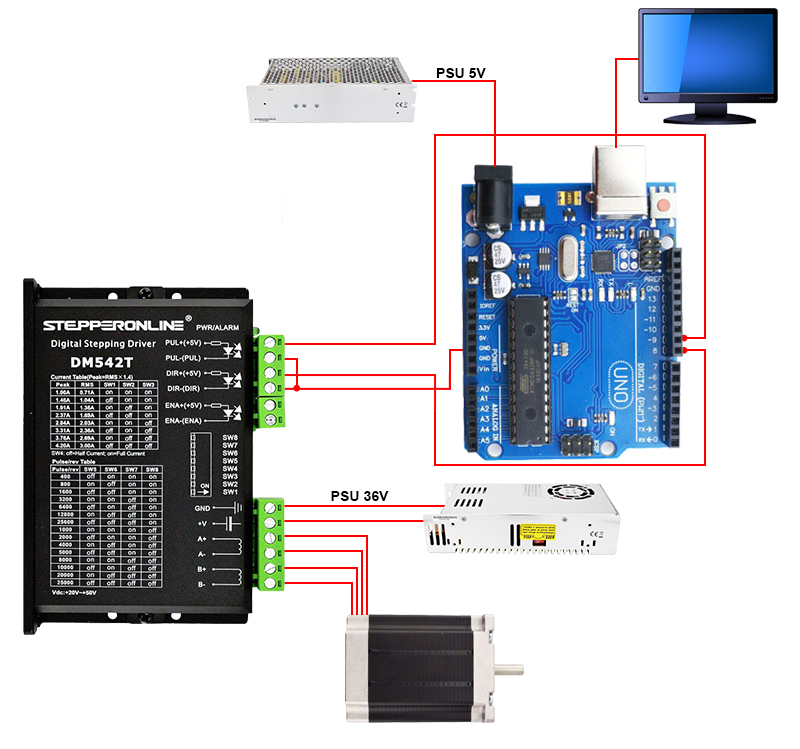
Stappenmotoren voor Raspberry Pi, Arduino, MicroPython (bijv. pyboard, Wipy, ESP32, ESP8266 en MicroBit)
Stappenmotoren zijn een zeer gebruikelijk randapparaat dat wordt gebruikt om toe te voegen aan computers met één bord, zoals de Raspberry Pi, Arduino, enz., voor hobbyisten om zichzelf basisvaardigheden voor computerprogrammering aan te leren. Het wordt vaak gezien als een logische volgende stap na het leren manipuleren en besturen van kleine, goedkope stappenmotoren, om LED-aan/uit-cycli en andere eenvoudige schakelaars of zoemertypes te leren besturen.
Er zijn veel soorten stappenmotoren motoren beschikbaar op STEPPERONLINE voor dergelijke toepassingen, te beginnen met extreem goedkope 5V-versies die eenvoudig kunnen worden aangesloten op de connectoren op het moederbord van de Raspberry Pi.
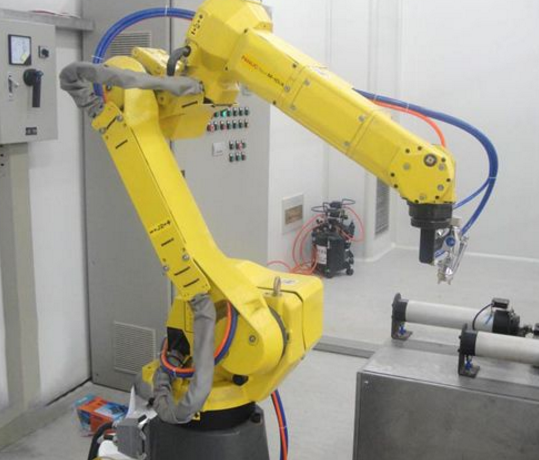
Stappenmotoren voor robotica
Stappenmotoren kunnen worden gebruikt voor bewegingscontrole en fungeren als actuatoren die de robotgewrichten activeren en de lading tot de gewenste snelheid kunnen versnellen.
Stappenmotoren voor camera's
Stappenmotoren hebben veel toepassingen in cameravideografie en worden vaak gebruikt voor het autofocussen en zoomen van camera's. Omdat de stappenmotor een soepel en uiterst nauwkeurig rijvermogen biedt, kunnen fouten in het detectieproces worden geminimaliseerd en kan er nauwkeurig en soepel worden scherpgesteld in combinatie met de nieuwste liveweergavetechnologie.
Stappenmotoren voor woningverbetering
Stappenmotoren hebben ook veel toepassingen in de automatisering van het huis. Er zijn veel voorkomende toepassingen van stappenmotoren om jaloezieën van airconditioning te bedienen, leidingkleppen te openen of te sluiten en gemotoriseerde zonwering aan te drijven.


| Bipolaire stappenmotor | Unipolaire stappenmotor |
| Hoger koppel | Lager koppel |
| Hogere verankering door windingen | Lagere verankering |
| Kleiner | Groter |
| Goedkoper | Duurder |
| Ingewikkeldere bediening, waardoor vereist een bord met power- en slew control-fasen | Eenvoudiger bediening doordat er slechts één voedingscircuit hoeft te worden voltooid |