








































































 Lood 10,16 mm (0,4")
 Lood 5,08 mm (0,2")
 Lood 2,54 mm (0,1")
 Lood 12.7mm (0.5")
 leiden 8mm (0.314961")
 Lood 12.7mm (0.5")
 Lood 6.35mm (0.25")
 Lood 6.35mm (0.25")
 Lood 2.54mm (0.1")
 Lood 2.54mm (0.1")
 leiden 4mm (0.15748")
 leiden 2mm (0.07874")
 Lood 12.7mm (0.5")
 Lood 6.35mm (0.25")
 Lood 2,54 mm (0,1")
 Lood 10.16mm(0.4")
 Lood 5.08mm (0.2")
 Lood 2.54mm (0.1")
 Nema 34 Stepper Motor & Driver & 60V Voeding")
 Nema 34 Stepper Motor & Driver & 60V Voeding")
 Nema 34 Stepper Motor & Driver & 60V Voeding")
 Nema 34 Stepper Motor & Driver & 60V Voeding")
 Nema 23 Stappenmotor & Driver")
 Nema 34 Stappenmotor & Driver")
 Nema 23 Stappenmotor & Driver")
 Nema 34 Stappenmotor & Driver")
 Nema 34 Stappenmotor & Driver")
 Nema 34 Stappenmotor & Driver & 60V Voeding")














Een artikel laat u alles weten over stappenmotoren
Klik direct op het hoofdstuk waarin u geïnteresseerd bent.
● Wat is een stappenmotor?
Een stappenmotor is een borstelloze synchrone gelijkstroommotor die digitale pulsen omzet in rotatie van een mechanische as. In tegenstelling tot veel andere standaardtypen motoren, draait een stappenmotor niet continu gedurende een bepaald aantal omwentelingen totdat de gelijkspanning die eraan wordt geleverd, wordt uitgeschakeld. Het heeft verschillende spoelen die in groepen zijn georganiseerd, de zogenaamde "fasen". Als elke fase beurtelings wordt ingeschakeld, draait de motor stap voor stap.
Stappenmotoren verdelen de gehele draaibeweging in meerdere gelijke stappen. Zolang de motor de juiste afmetingen heeft voor het koppel en de snelheid van de toepassing, kan de positie van de motor worden geregeld om in een van deze stappen te bewegen en daar te blijven zonder enige feedback van een positiesensor.
Bovendien is een stappenmotor een digitaal invoer- en uitvoerapparaat. Het is bijzonder geschikt voor toepassingen waarbij het stuursignaal de vorm heeft van digitale pulsen en niet van analoge spanningen. Een digitale puls die naar de driver van een stappenmotor wordt gestuurd, zorgt ervoor dat de motor een bepaalde bewegingshoek vergroot. Naarmate de frequentie van de digitale pulsen toeneemt, wordt de stapbeweging een continue rotatie.
Met computergestuurde stappen kunt u een zeer nauwkeurige positionering en/of snelheidsregeling bereiken. Als gevolg hiervan zijn stappenmotoren de motor bij uitstek geworden voor veel precisie-motion control-toepassingen.
● Hoe werkt stappenmotor?
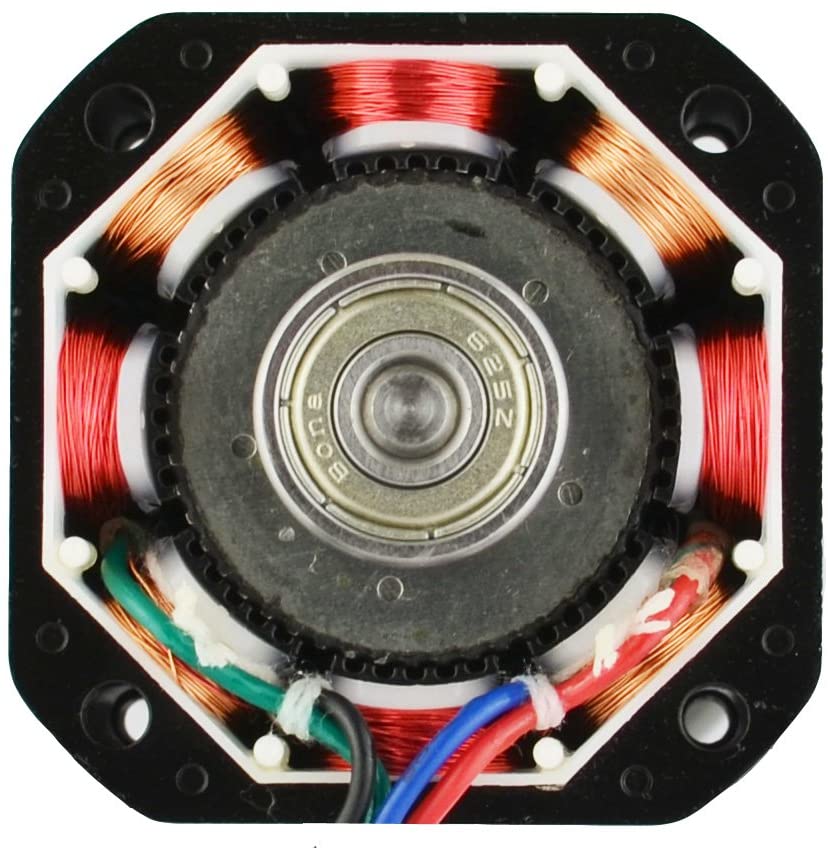
Wanneer er stroom door de statorwikkeling vloeit, genereert de statorwikkeling een magnetisch vectorveld. Dit magnetische veld zal de rotor ertoe aanzetten om onder een bepaalde hoek te roteren, zodat de richting van het magnetische veld van de rotor consistent is met de richting van het magnetische veld van de stator. Wanneer het magnetische vectorveld van de stator over een hoek roteert. De rotor draait ook onder een hoek ten opzichte van dit magnetische veld. Elke keer dat er een elektrische puls wordt ingevoerd, draait de motor een hoek en gaat één stap vooruit. De uitgangshoekverplaatsing is evenredig met het aantal ingangspulsen, en de rotatiesnelheid is evenredig met de pulsfrequentie. Verander de volgorde waarin de wikkelingen worden bekrachtigd en de motor zal van richting veranderen. Daarom kan de rotatie van de stappenmotor worden geregeld door het pulsnummer, de frequentie en de bekrachtigingsvolgorde van elke fasewikkeling van de motor te regelen.
Veel voorkomende typen motoren hebben ijzeren kernen en wikkelspoelen aan de binnenkant. De wikkeling heeft weerstand en veroorzaakt verliezen wanneer elektriciteit wordt toegepast. De omvang van het verlies is evenredig met de weerstand en het kwadraat van de stroom. Dit noemen we vaak koperverlies. Als de stroom geen standaard gelijkstroom- of sinusgolf is, zal er ook harmonisch verlies optreden; de ijzeren kern zal hysteresis hebben. Het wervelstroomeffect veroorzaakt ook verliezen in het magnetische wisselveld, en de grootte ervan is gerelateerd aan het materiaal, de stroom, de frequentie en de spanning. Dit wordt ijzerverlies genoemd.
Zowel koper- als ijzerverliezen verschijnen in de vorm van warmte, wat de efficiëntie van de motor beïnvloedt. Stappenmotoren streven over het algemeen naar positioneringsnauwkeurigheid en koppeloutput, en hun efficiëntie is relatief laag. De stroom is over het algemeen groter en heeft een hogere harmonische inhoud. De frequentie van de stroomwisseling verandert ook met de verandering van de rotatiesnelheid. Daarom is het gebruikelijk dat stappenmotoren warm worden, meer dan normaal.
De motor zet elektrische energie om in mechanische energie, en de stappenmotor is een regelelement met open lus dat elektrische pulssignalen omzet in hoekverplaatsing of lineaire verplaatsing. Onder omstandigheden zonder overbelasting zijn het toerental en de stoppositie van de motor alleen afhankelijk van de frequentie en het aantal pulsen van het pulssignaal en worden ze niet beïnvloed door veranderingen in de belasting. Met andere woorden: als een pulssignaal aan de motor wordt toegevoegd, zal de motor een staphoek draaien. Het bestaan van deze lineaire relatie, gekoppeld aan de kenmerken van de stappenmotor die alleen periodieke fouten vertoont en geen geaccumuleerde fouten. Het maakt het heel eenvoudig om stappenmotoren te gebruiken om de snelheid, positie en andere controlegebieden te regelen.
● Grootte stappenmotor
Stappenmotoren worden geclassificeerd op framegrootte, zoals "Nema 17" of "Nema 23". Heeft u zich ooit afgevraagd hoe dit gebeurt en wat het betekent? De American Electrical Manufacturers Association stelt normen voor veel elektrische producten, waaronder stappenmotoren. Over het algemeen betekent "Nema 17" dat het montageoppervlak van de motor 1,7 inch in het vierkant is. Daarom zijn de afmetingen van de Nema 23 stappenmotor 2,3 inch in het vierkant. Of 57 mm zoals hieronder weergegeven.
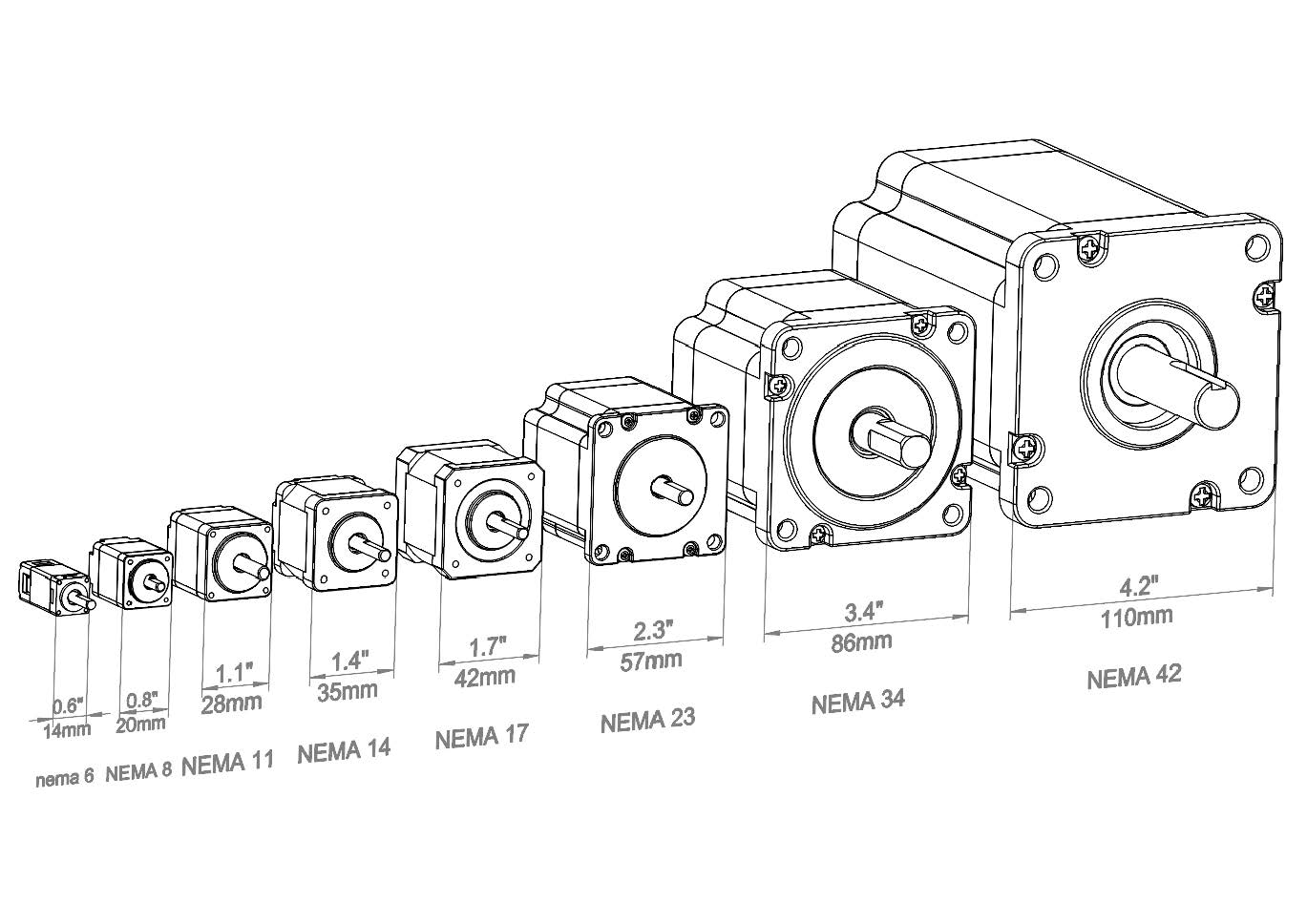
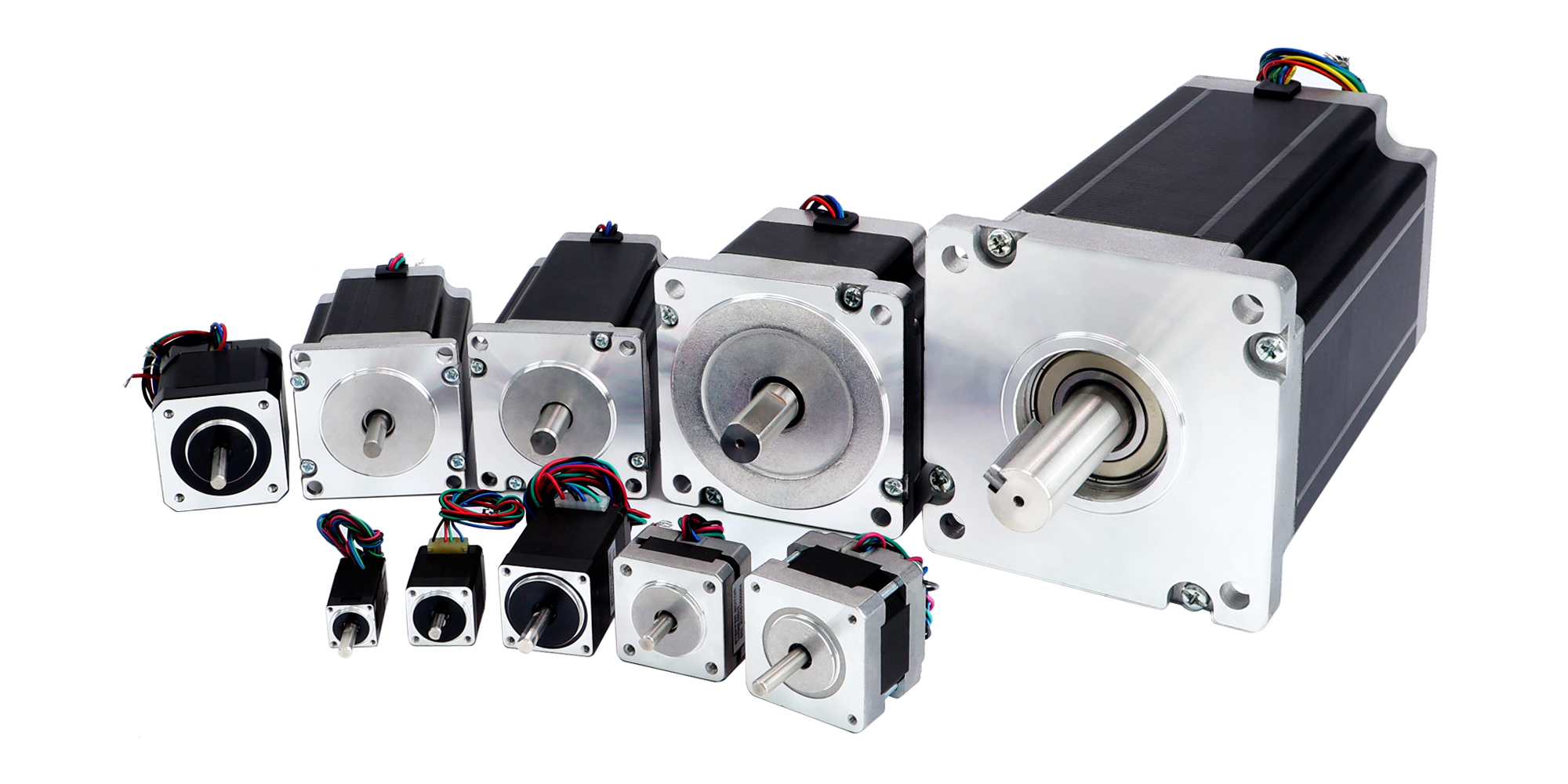
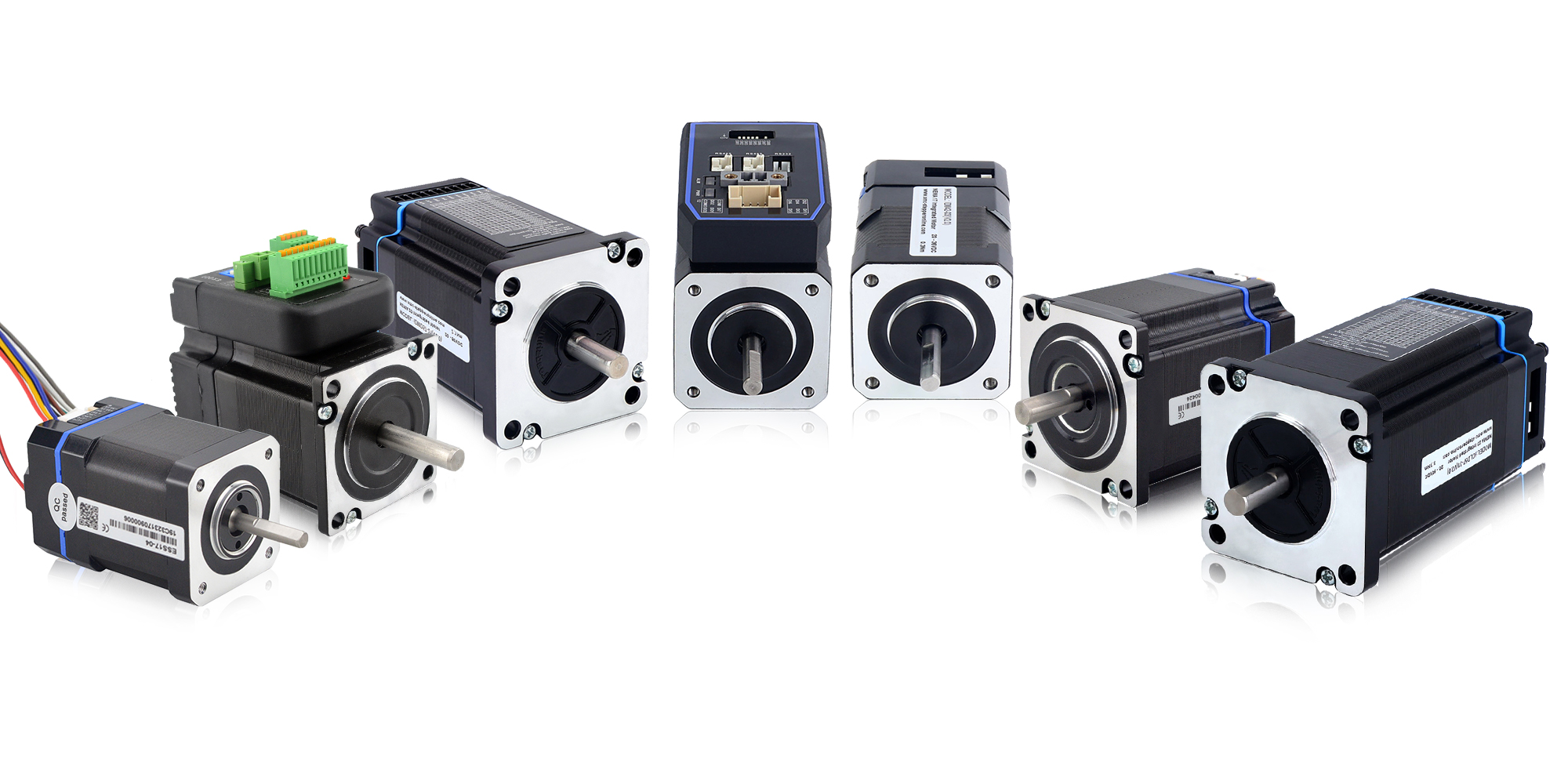
De onderstaande foto toont Nema-stappenmotoren van maat 06, 08, 11, 14, 17, 23, 24, 34 en 42. Maat 24 is een beetje een anomalie - er is geen officiële Nema-definitie voor maat 24. Hij wordt op dezelfde manier gemonteerd als maat 23, maar is iets breder (ongeveer 4 mm), waardoor het gebruik van grotere rotoren en stators mogelijk is en daarom ongeveer 30% meer koppel.

In wezen zijn fabrikanten het eens over de voorgestelde norm. Dit geeft fabrikanten een grotere ontwerpflexibiliteit omdat ze van tevoren weten dat de ene Nema 17-motor op een andere Nema 17-montage past, zonder dat ze iets opnieuw hoeven te ontwerpen; vooral als ze ervoor kiezen om van motorleverancier te veranderen.
● Stappenmotortypen
Er worden veel soorten stappenmotoren verkocht door STEPPERONLINE, en als u de kenmerken en het gebruik van verschillende soorten stappenmotoren begrijpt, kunt u beslissen welk type het beste bij u past.
Hybride stappenmotor is een combinatie van variabele reluctantie en permanente magneetmotor. De stator wordt elektromagnetisch gestimuleerd zoals een stappenmotor met variabele weerstand, en de rotor van de stappenmotor wordt axiaal gemagnetiseerd zoals een stappenmotor met permanente magneet. Deze stappenmotor is een actuator die elektrische pulsen omzet in hoekverplaatsing.
Vergeleken met de andere twee soorten stappenmotoren bieden hybride stappenmotoren een hoger koppel met een kleinere staphoek en betere dynamische eigenschappen. Met de ontwikkeling van wetenschap en technologie, vooral de ontwikkeling van permanente magneetmaterialen, halfgeleidertechnologie en computertechnologie, zijn deze stappenmotoren op grote schaal gebruikt in de industriële automatisering, robotica, textiel- en medische industrie.
● Closed Loop Stappenmotor
Een stappenmotor met gesloten lus is een stappenmotor waaraan aan het uiteinde van de motor een encoder is toegevoegd om regeling met gesloten lus te bereiken. De closed-loop regeling van een stappenmotor is een servosysteem dat gebruik maakt van positie- en/of snelheidsfeedback om de faseverandering te bepalen die past bij de rotorpositie, waardoor de prestaties van de stappenmotor aanzienlijk kunnen worden verbeterd zonder dat er stappen verloren gaan.
De stappenmotor met gesloten lus heeft een structuur met dubbele wikkeling en de motor maakt gebruik van een zeer nauwkeurige lineaire encoder. Elke keer dat de motor één frame draait, geeft de encoder een puls af, zodat de nauwkeurige rotatiepositie van de motor kan worden verkregen, terwijl gewone stappenmotoren er maar één hebben. De positie van de wikkeling en de rotatie van de motor is onbetrouwbaar.

De stappenmotor met gesloten lus maakt gebruik van vergrendelingsregeling, waarvoor de invoer van een referentiepuls vereist is. Door middel van feedbackregeling kan de stuurpuls worden gesynchroniseerd. De rotatiepositie van de motor kan constant worden gehouden, terwijl de gewone stappenmotor open-lusregeling gebruikt en geen referentiepuls hoeft in te voeren. Alleen de stapfrequentie en richting van de motor hoeven te worden geregeld, en de rotatiepositie van de motor is oncontroleerbaar.
Vergeleken met gewone stappenmotoren hebben stappenmotoren met gesloten lus een hoger dynamisch responsvermogen en kunnen ze nauwkeurige rotatiepositiecontrole bereiken met kleine positiefouten. Bovendien heeft het een hoge precisie en kan de positienauwkeurigheid binnen 0,1 graden worden geregeld, terwijl de positienauwkeurigheid van gewone stappenmotoren slechts binnen 1 graad kan worden geregeld, met een slechte bedrijfsstabiliteit en grote positiefouten.
Bovendien hebben stappenmotoren met gesloten lus een hoger draagvermogen en zijn ze bestand tegen grotere belastingen, terwijl gewone stappenmotoren een lager draagvermogen hebben en een slechter uithoudingsvermogen hebben.
Geïntegreerde stappenmotoren combineren stappenaandrijvingen en motoren in één eenheid. Geïntegreerde stappenmotoren bieden een ruimtebesparend ontwerp dat de bedrading vermindert en kosten bespaart in vergelijking met afzonderlijke motor- en aandrijfcomponenten. Ze zijn ideaal voor toepassingen zoals verpakken en etiketteren, geautomatiseerd testen en meten, geautomatiseerde assemblage en life sciences.
Andere voordelen van het integreren van motoren en aandrijfeenheden zijn onder meer implementatiegemak, minder complexiteit van de bedrading, snellere installatie en ontwerp van het systeem, en gegarandeerde compatibiliteit met motoraandrijvingen.
● Stappenmotor met permanente magneet
Permanente magneetmotoren gebruiken een permanente magneet (PM) in de rotor en werken met de aantrekking of afstoting tussen de rotormagneet en de stator-elektromagneten. De rotor van een stappenmotor met permanente magneet is gemaakt van permanent magneetstaal. De stator van de stappenmotor wordt door middel van een stempelmethode verwerkt tot een klauwvormige tandpool, en de rotor maakt gebruik van een permanent magneetmagnetisch staal met radiale meerpolige magnetisatie. Het magnetische veld dat wordt gegenereerd door de richting van de spoelstroom sluit elkaar uit met het magnetische veld van de rotor, zodat de motor in tegengestelde richting draait.
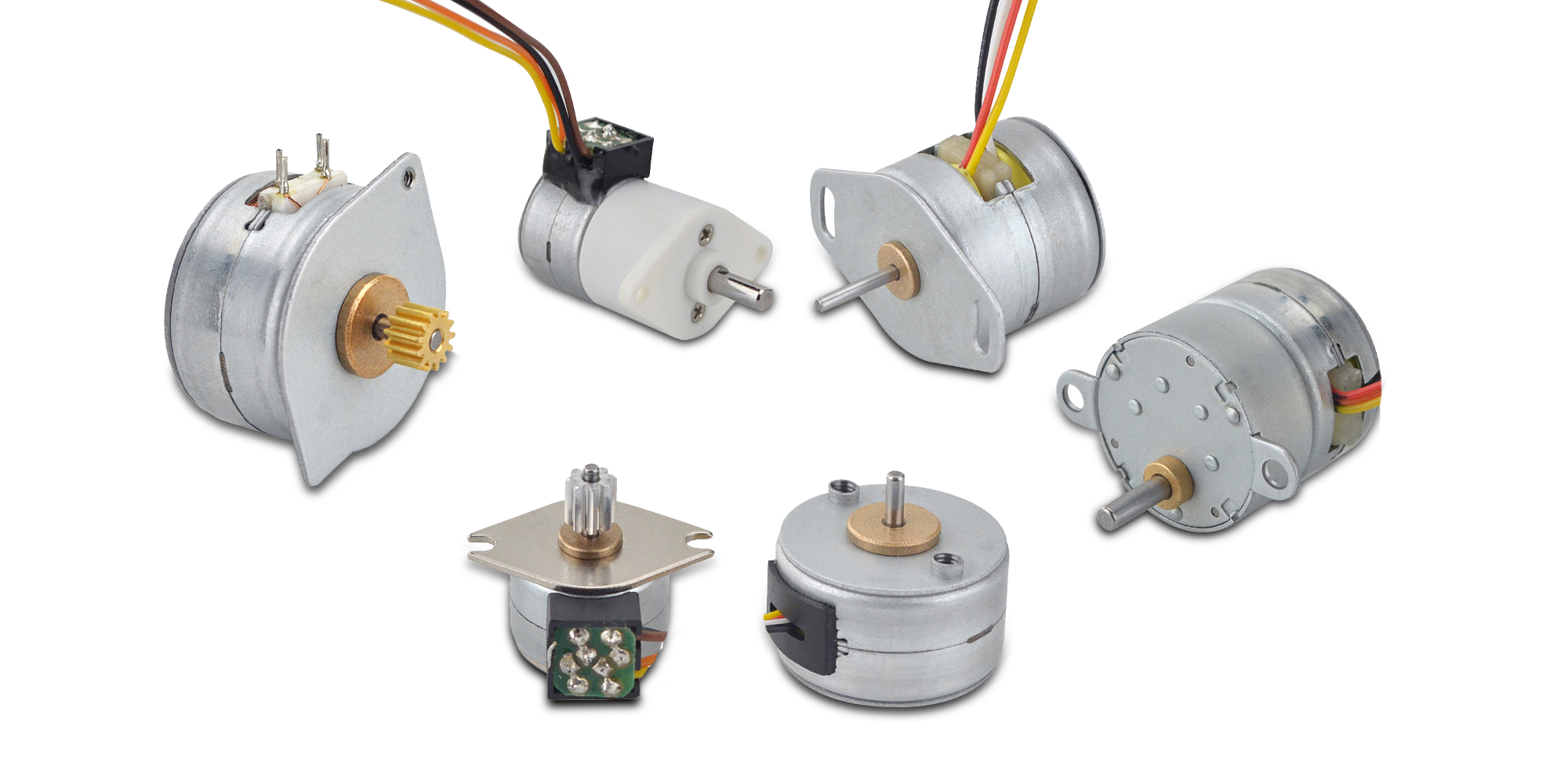
Deze stappenmotor wordt ook wel pm-stappenmotor genoemd. De axiale richting van de gehele stator en rotor van de motor is verdeeld in twee secties en het midden is gescheiden door een magnetisch scheidingsstuk. De twee secties zijn onderling gescheiden door een staphoek en bestaan elk uit een stator, een rotor en een ringwikkeling die om de stator is aangebracht. De pm-stappenmotor wordt voornamelijk gebruikt in computerrandapparatuur, fotografische systemen, opto-elektronische combinatieapparaten, klepbediening, kernreactoren, bankterminals, CNC-bewerkingsmachines, automatische opwindmachines, elektronische horloges en medische apparatuur, enz.
● Stappenmotor met variabele weerstand
Een stappenmotor met variabele reluctantie is een type elektromotor die werkt volgens het principe van magnetische reluctantie. Deze motor is opgebouwd met een ijzeren rotor en meerdere statorwikkelingen. De wikkelingen worden in een bepaalde volgorde gemagnetiseerd, waardoor de rotor in discrete stappen beweegt.
Stappenmotoren met variabele reluctantie bieden hoge stapsnelheden en een goed koppel bij lage snelheden. Bij hogere snelheden kunnen de prestaties echter minder bevredigend zijn vanwege resonantieproblemen.
Stappenmotoren met variabele reluctantie worden als robuust en betrouwbaar beschouwd, waardoor ze geschikt zijn voor omgevingen waar de motor onderhevig kan zijn aan zware omstandigheden.
Een van de belangrijkste nadelen van stappenmotoren met variabele reluctantie is dat ze doorgaans luidruchtiger zijn dan andere soorten stappenmotoren. Dit komt doordat de rotor slecht gedempt is, wat resulteert in hogere niveaus van mechanische trillingen.
Lineaire stappenmotoren zijn een speciaal type stappenmotor waarvan het ontwerp en de werkingsprincipes verschillen van traditionele roterende stappenmotoren. Een lineaire stappenmotor is een lineaire motor die lineaire verplaatsing bereikt door lineaire beweging in plaats van de roterende beweging die wordt bereikt door traditionele stappenmotoren. De structuur van een lineaire stappenmotor bestaat meestal uit een vaste stator en een beweegbare schuif. De stator is uitgerust met spoelen aan de binnenkant en de schuif is uitgerust met permanente magneten. Wanneer stroom door de statorspoel stroomt, wordt een magnetisch veld gegenereerd. De interactie tussen de permanente magneet op de schuif en het magnetische veld van de stator genereert een aantrekkings- of afstotende kracht, waardoor de schuif lineair langs de vaste as beweegt. Het aansturen van een lineaire stappenmotor is vergelijkbaar met een traditionele stappenmotor. Door de richting en grootte van de stroom te regelen, kunnen de positie en snelheid van de schuifregelaar worden geregeld. Het pulssignaal van elke stappenmotor verplaatst de schuifregelaar met een vaste stap, zodat een nauwkeurige lineaire verplaatsing kan worden bereikt.

Er zijn drie veel voorkomende typen lineaire stappenmotoren, namelijk externe aandrijving, doorgaande as en vaste as. Het kan worden geselecteerd op basis van de belangrijkste indicatoren van specifieke toepassingen. Lineaire stappenmotoren hebben de voordelen van hoge precisie, spelingsvrije transmissie en snelle respons, waardoor ze de voorkeur genieten in toepassingen die hoogwaardige lineaire bewegingscontrole vereisen.
● Unipolair versus bipolair
Een stappenmotor is een motor die de rotatiehoek regelt door middel van elektrische pulsen. Bipolaire stappenmotoren en unipolaire stappenmotoren zijn twee veel voorkomende typen stappenmotoren. Het belangrijkste verschil tussen beide is de controlemethode. Een bipolaire stappenmotor moet de stroom omkeren om de richting van de rotor te veranderen, dus er zijn 4 elektroden nodig om de richting te regelen, elke elektrode heeft twee toestanden (AAN/UIT).
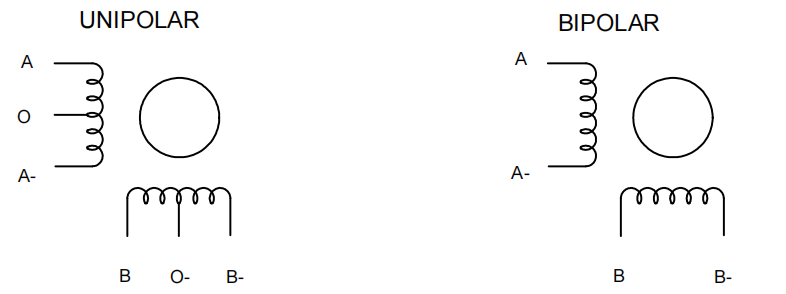
Een unipolaire stappenmotor heeft slechts twee elektroden nodig om de rotatie van de rotor te regelen, en de motor draait door de richting van de stroom te veranderen. Daarom hebben unipolaire stappenmotoren, vergeleken met bipolaire stappenmotoren, slechts 2 elektroden nodig om dezelfde bewegingscontrole te bereiken. Omdat unipolaire stappenmotoren echter de toevoeging van een unipolaire driver in het stuurcircuit vereisen, is de complexiteit van het circuit iets hoger.
Bipolaire stappenmotoren en unipolaire stappenmotoren hebben elk hun eigen voor- en nadelen, en de juiste motor kan worden geselecteerd op basis van het specifieke toepassingsscenario.
De voordelen van bipolaire stappenmotoren zijn een groot koppel, hoge snelheid, hoge precisie en eenvoudige bediening. Daarom worden ze vaak gebruikt in situaties waar snelle en uiterst nauwkeurige bediening vereist is. Het koppel en de precisie van unipolaire stappenmotoren worden vergeleken met die van bipolaire stappenmotoren. De motor is slechter en langzamer. Bovendien zijn de drivers die in unipolaire stappenmotoren worden gebruikt kostbaar en hebben ze minder opties.
● Hoe kiest u een stappenmotor, driver en voeding?
Stappenmotoren zijn een goede keuze als je beweging wilt controleren. Ze kunnen worden gebruikt in scenario's waarin controle over de rotatiehoek, snelheid, positie en synchronisatie vereist is.
Als we dus een stappenmotor kiezen, zijn er verschillende factoren waarmee rekening moet worden gehouden.
1. Hoe is de motor gekoppeld aan de belasting?
Nadat u het type koppeling tussen de motor en de belasting heeft bepaald, kunt u een stappenmotor selecteren op basis van aslengte, diameter en astype. Momenteel hebben STEPPERONLINE standaard stappenmotoren een verscheidenheid aan aslengtes, asdiameters en astypen, en kunnen ze verschillende op maat gemaakte diensten voor de motoras leveren.2. Hoe snel moet de lading bewegen of versnellen?
Bij het kiezen van de juiste motor moet u rekening houden met de balans tussen snelheid en belasting. Voor sommige apparatuur die snelle beweging vereist, kunnen we hogesnelheidsmotoren kiezen, maar als de belasting groter is, moeten we een motor met een groter koppel kiezen. Daarom moet u bij het selecteren van een motor rekening houden met de balans tussen snelheid en belasting op basis van de werkelijke behoeften, en een motor kiezen die zowel aan de bewegingssnelheid als aan de belasting kan voldoen. Hieronder vindt u de maximale snelheid en de aanbevolen snelheid van elke motorgrootte onder nullast.
| Geen laadsnelheid | |||
| Motortype | Afmetingen (mm) | Max. Snelheid(rpm) | Aanbevolen werksnelheid (tpm) |
| Open lusmotor | Nema 6(14x14) | 1000 | 100-600 |
| Nema 8(20x20) | 1000 | 100-600 | |
| Nema 11(28x28) | 1000 | 100-600 | |
| Nema 14(35x35) | 1000 | 100-600 | |
| Nema 16(40x40) | 1000 | 100-500 | |
| Nema 17(42x42) | 1000 | 100-500 | |
| Nema 23(57x57) | 1000 | 100-500 | |
| Nema 24(60x60) | 1000 | 100-500 | |
| Nema 34(86x86) | 1000 | 100-400 | |
| Nema 42(110x110) | 500 | 100-300 | |
| Gesloten lusmotor | Nema 8(20x20) | 2000 | 100-1500 |
| Nema 11(28x28) | 2000 | 100-1500 | |
| Nema 14(35x35) | 2000 | 100-1000 | |
| Nema 17(42x42) | 2000 | 100-1000 | |
| Nema 23(57x57) | 1500 | 100-1000 | |
| Nema 24(60x60) | 1500 | 100-1000 | |
| Nema 34(86x86) | 1500 | 100-1000 | |
U kunt ook bepalen of de motor voldoet aan uw belastingssnelheidsvereisten op basis van het motorcurvediagram.
3. Hoeveel koppel is er nodig om de last te verplaatsen?
De meeste motoren hebben koppelwaarden. Dit is waar u naar moet kijken om te beslissen of de motor de kracht heeft om te doen wat u wilt. Het houdkoppel van een stappenmotor is vergelijkbaar met het "vermogen" van een conventionele motor. De fysieke structuur van stappenmotoren is echter compleet anders dan die van AC- en DC-motoren, en het uitgangsvermogen van de motor varieert afhankelijk van de snelheid, stroom en ingangsspanning.
Als het vereiste koppel minder dan 0,8 N.m bedraagt, kiest u over het algemeen Nema 8 (20x20 mm), Nema 11 (28x28 mm), Nema 14 (35x35 mm), Nema 16 (39x39 mm), Nema 17 (42x42 mm); als het koppel ongeveer 1N.m is, kies dan voor een Nema 23 stappenmotor. Als het koppel meer dan enkele N.m bedraagt, moet u een stappenmotor kiezen met specificaties zoals Nema 34 en Nema 42.
4. Welke nauwkeurigheid is vereist bij het positioneren van een last?
De nauwkeurigheid van stappenmotoren neemt toe naarmate de stappen kleiner zijn. Dit komt omdat één revolutie is opgedeeld in zorgvuldiger, talrijker stappen die minder ruimte laten voor fouten. Een stappenmotor met een hoek van bijvoorbeeld 0,9° levert een hogere nauwkeurigheid dan een stappenmotor met een hoek van 1,8°.
Een veel voorkomende misvatting is dat 1,8°-motoren die met halve stappen draaien dezelfde nauwkeurigheid zullen bereiken als 0,9°-stappenmotoren die met volledige stappen draaien. Een andere misvatting is dat er koppel verloren gaat bij gebruik van een stappenmotor van 0,9°. Deze aannames zijn onjuist, en inzicht in de mechanische ontwerpkenmerken kan verklaren waarom.
Over het algemeen zijn stappenmotoren van 0,9° het meest geschikt voor toepassingen met hoge snelheid en hoge precisie. Omgekeerd leveren stappenmotoren van 1,8° een hoger koppel maar een lagere nauwkeurigheid. Ook verkrijgbaar zijn 0,9° stappenmotoren met een gepatenteerd 12-polig ontwerp. Deze meer geavanceerde motoren combineren de kenmerken van 0,9° en 1,8° motoren en bieden een hoge nauwkeurigheid en een hoger koppel.
Om het maximale uit uw stappenmotor te halen, moet u de juiste driver gebruiken. Bij het selecteren van een driver zijn er drie belangrijke elementen waarmee u rekening moet houden: spanning, stroom, microstepping en aantal fasen. Elk speelt een belangrijke rol in de prestaties van de motor. Als u geen rekening houdt met deze parameters, kan dit resulteren in slechte prestaties, luider geluid of zelfs oververhitting en uitval van de motor, wat resulteert in verloren productietijd en hogere onderhoudskosten.
1. Nominale spanning
Het overschrijden van de maximale nominale spanning van de motor of het gebruik ervan met een hogere voedingsspanning kan ertoe leiden dat de motor defect raakt. Om deze reden moet u bij het selecteren van een stappenmotordriver de maximale nominale spanning of de typische nominale spanning van de motor uit de productbeschrijving of de koppelcurve kennen. Stappenmotoren worden doorgaans aangedreven door drivers die werken op AC (120V of 240V) of laagspannings-DC (zoals 24V, 36V of 48V). Als u een motor op een hogere spanning laat draaien dan gespecificeerd, zoals een motor met een vermogen van 24 VDC, op een hoge spanning, zal de motor snel oververhitten. Omgekeerd zal een motor die op een te lage spanning werkt (bijvoorbeeld een hoogspanningsmotor die op 24 VDC draait) minder stroom produceren en kan de motor afslaan als de belasting niet wordt verminderd.
2. Huidige beoordeling
Zorg ervoor dat de driver geschikt is voor een breed stroombereik, zodat u het systeem kunt testen op verschillende spanningen die geschikt zijn voor uw toepassing. Voor de stroomsterkte moet u rekening houden met zowel de continue of effectieve stroom als de piekstroomvereiste. Bij geborstelde en borstelloze DC-motoren is de tegen-EMK niet aanwezig tijdens het opstarten en stilstaan en ziet de bestuurder alleen de wikkelweerstand van de motor. Er is daarom een stroomstoot voordat de motor gaat draaien en een tegen-EMK genereert die tegengesteld is aan de voedingsspanning, waardoor het stroomverbruik wordt verminderd. Zelfs als uw toepassing tijdens normaal gebruik slechts maximaal 1A continue stroom nodig heeft, moet deze mogelijk 2 tot 3 keer of zelfs meer continue stroom verwerken bij het opstarten en afslaan.
3. Microstappen
Stappenmotoren bewegen in stappen die normaal gesproken 1,8° zijn, d.w.z. 200 stappen per omwenteling. Dit kan een probleem zijn als we kleine bewegingen nodig hebben. Eén optie zou zijn om een soort versnellingsbak te gebruiken, maar er is nog een andere optie: microstepping. Microstepping betekent dat we meer dan 200 stappen per omwenteling kunnen maken en dus kleinere bewegingen.
Bij het bedienen van stappenmotoren met volledige stappen ziet de uitvoer van de stappenmotoraansturing eruit als een blokgolfsignaal en genereert het grove bewegingen. Hoe groter de microstappen, hoe meer het uitgangssignaal op een sinusgolf lijkt en de stappenmotor soepeler beweegt. Dit heeft echter ook een nadeel. Naarmate de microstapwaarde toeneemt, daalt het koppel scherp, en als de waarde te groot is, kan de motor helemaal niet genoeg koppel genereren om te draaien. Normaal gesproken kan 1/4, 1/8 of zelfs 1/16 worden gebruikt om bevredigend soepele bewegingen te bereiken en toch voldoende koppel te genereren.
4. Aantal fasen
Stappenmotordrivers worden gebruikt om een specifiek aantal fasen te besturen. Voor typische unipolaire en bipolaire stappenmotoren worden tweefasige aandrijvingen gebruikt, maar motoren met variabele reluctantie gebruiken driefasige aandrijvingen. Controleer het fasenummer van de motor voordat u de driver selecteert.
Als je een stappenmotor gebruikt, heb je een voeding nodig om de stappenmotor van stroom te voorzien. Een juiste voeding kan ervoor zorgen dat uw stappenmotor optimaal presteert. In plaats daarvan kan een verkeerde voeding lage prestaties of grotere energieverspilling veroorzaken.
Hieronder vindt u enkele tips voor het kiezen van een voeding:
| Motorgrootte | Rijspanning |
| Nema 8 - Nema 17 | 12 - 24VDC |
| Nema 23, Nema 24 | 24 - 48VDC |
| Nema 34 | 48 - 100VDC/30 - 70VAC |
| Nema 42 - Nema 52 | 110 - 220VAC |
- Controleer de nominale stroom van de motor. Je kunt het vinden op het motorgegevensblad.
- Bevestig de rijspanning. De aandrijfspanning is de belangrijkste factor bij het kiezen van een voeding. Normaal gesproken zal een hogere spanning betere prestaties leveren.
Onderstaande tabel bevat de aanbevolen spanning voor stappenmotoren. U kunt de juiste spanning kiezen volgens uw toepassing.
Bereken de vermogenswaarde. Wij bieden u een eenvoudige formule:
P=n*I*V*1.2P: Vermogenswaarde
n: Aantal stappenmotoren
I: Nominale motorstroom
V: Stuurspanning
1.2: dit betekent 20% van de marge
Bijv. 3 motoren met elk een nominale stroom van 3A en een aandrijfspanning van 36V, het geschatte vermogen is ongeveer: 3*3A*36V*1,2=388,8W. u kunt dus een stroomleverancier van 36 V en 400 W kiezen
Let op: de formule is slechts een geschatte waarde van het vermogen; voor verschillende werkomstandigheden is een ander vermogen nodig. In een systeem met 3 assen werken bijvoorbeeld niet alle 3 de motoren tegelijkertijd en werken niet alle 3 de motoren met maximale belasting enz. In deze omstandigheden kan de vermogenswaarde lager zijn dan de waarde die met de formule wordt berekend.
p>● Voor- en nadelen van stappenmotoren
Voordelen van stappenmotoren
- Vanwege hun interne structuur hebben stappenmotoren geen sensoren nodig om de motorpositie te detecteren. Omdat de motor in "stappen" beweegt, kan door het simpelweg tellen van deze stappen de motorpositie op een bepaald moment worden bepaald.
- Stappenmotoren zijn bovendien zeer eenvoudig te besturen. Hoewel de motor een driver nodig heeft, zijn er geen complexe berekeningen of instellingen nodig om goed te kunnen functioneren. Over het algemeen is de hoeveelheid werk die nodig is voor de besturing lager in vergelijking met andere motoren. Met de microstepping-methode kun je een hoge positioneringsnauwkeurigheid bereiken van maximaal ongeveer 0,007°.
- Stappenmotoren bieden een groot koppel bij lagere snelheid, zijn uitstekend geschikt voor het vasthouden van positie en hebben een lange levensduur.
- De rotor van de stappenmotor heeft een grote massa en een hoge traagheid. Het is gevoelig voor trillingen en geluid tijdens gebruik op hoge snelheid, wat de stabiliteit en nauwkeurigheid van de beweging beïnvloedt. Dit is een groot nadeel van stappenmotoren en er moeten maatregelen worden genomen om dit effect te verzachten of te elimineren.
- Het werkingsprincipe van de stappenmotor is het regelen van de positie en snelheid door middel van onmiddellijke pulscontrole op korte termijn. Bij langdurig gebruik kan de motor gemakkelijk oververhit raken of zelfs doorbranden. Voor toepassingen die langdurig continu gebruik vereisen, zijn stappenmotoren mogelijk niet de beste keuze.
Gebruik en toepassingen van stappenmotoren
Vanwege de kenmerken van stappenmotoren worden ze gebruikt in veel toepassingen die eenvoudige positiecontrole en de mogelijkheid om positie te behouden vereisen, waaronder:
1. 3D-printers
Stappenmotor is een van de belangrijke componenten van de 3D-printer. Afhankelijk van het type printer kunnen ze voor uiteenlopende toepassingen worden gebruikt. Stappenmotoren worden bijvoorbeeld gebruikt om een extruder of bouwplatform individueel langs de x-, y- en z-assen te verplaatsen. Meestal is het extrudersamenstel uitgerust met een stappenmotor die het filament in de extruder trekt.
Stappenmotoren zijn uniek omdat ze naar een bekend interval kunnen bewegen en dan in die positie kunnen blijven. Omdat ze objecten herhaaldelijk naar een vaste positie kunnen verplaatsen, worden ze vaak gebruikt in robots en printers.
Stappenmotoren zijn er in vele maten. De meest gebruikte formaten in 3D-printers zijn NEMA 14, NEMA 17, NEMA 23 en NEMA 24.
2. CNC-machines
Stappenmotoren zijn een alternatieve keuze voor servomotoren en kunnen de meeste soorten CNC-machines van stroom voorzien. CNC-toepassingen omvatten een breed scala aan productieprocessen waarbij voorgeprogrammeerde computersoftware de werking en fysieke beweging van werktuigmachines in fabrieken en productieomgevingen regelt.Hoewel stappenmotoren in CNC-toepassingen vaak worden gezien als een "zuiniger" alternatief voor servomotoren, is dit een te grote vereenvoudiging gebaseerd op verouderde technologische kennis, en deze is tegenwoordig niet altijd strikt nauwkeurig. Stappenmotoren zijn doorgaans goedkoper dan servomotoren voor hetzelfde vermogen, maar moderne versies zijn even veelzijdig. Als gevolg hiervan vinden stappenmotoren een bredere toepassing en zijn ze aanwezig in een breder scala aan machines en systemen, van werktuigmachines tot desktopcomputers en auto's.
CNC-stappenmotoren hebben een cruciaal voordeel ten opzichte van servomotoren omdat ze geen encoders nodig hebben. Servomotoren zijn inherent uitdagender om te begrijpen en te bedienen dan stappenmotoren, deels omdat ze encoders bevatten, die gevoeliger zijn voor storingen dan veel andere componenten in betrouwbare servomotoren. Stappenmotoren hebben geen encoders nodig, waardoor ze in theorie betrouwbaarder zijn dan servomotoren.
Bovendien zijn stappenmotoren ook borstelloos (in tegenstelling tot servomotoren), wat betekent dat ze niet regelmatig hoeven te worden vervangen zolang de lagers in goede staat verkeren.
3. Cameralenzen
Stappenmotoren worden veel gebruikt in diverse toepassingen binnen de high-end cameratechnologie. Ze kunnen worden gebruikt om uiterst nauwkeurige interne structuren te controleren, zoals automatische scherpstelling en diafragma-instellingen in de lens. Bovendien vinden stappenmotoren toepassingen in de behuizing en externe mechanische structuren van beveiligingscamera's en bewakingssystemen op afstand.
Vooral stappenmotoren, samen met elektrische cameraschuifregelaars, zorgen voor een zeer soepele bediening van camerapositioneringsapparatuur. Dit betekent dat lenzen die door veiligheidsvoorzieningen zijn vastgelegd, betrouwbaar kunnen worden vastgehouden, waardoor mogelijke problemen met beeldvervorming worden vermeden die worden veroorzaakt door de fysieke bewegingen van de camera rond het gezichtsveld. Stappenmotoren bieden verschillende aantrekkelijke functies voor positioneringssystemen voor camera- en videobewaking, waaronder volledig koppel bij stilstand, uiterst nauwkeurige en onmiddellijke responstijden voor alle bewegingsinvoer, consistente herhaalbaarheid van voorgeprogrammeerde bewegingen en eenvoudige open-lusregeling op basis van vaste stapgroottes .
Naast het bovenstaande worden stappenmotoren ook gebruikt in de beveiliging, servicerobots, printers, scanners, textielmachines, verpakkingsmachines, compact disc-drives en intelligente verlichting, enz.