Het besturen van stappenmotoren is een breed onderwerp en dit artikel is een vereenvoudigde beginnershandleiding voor het gebruik van stappenmotoren. Het behandelt de basisprincipes van hoe stappenmotoren werken. Het doel is om beginners te helpen stappenmotoren aan de praat te krijgen.
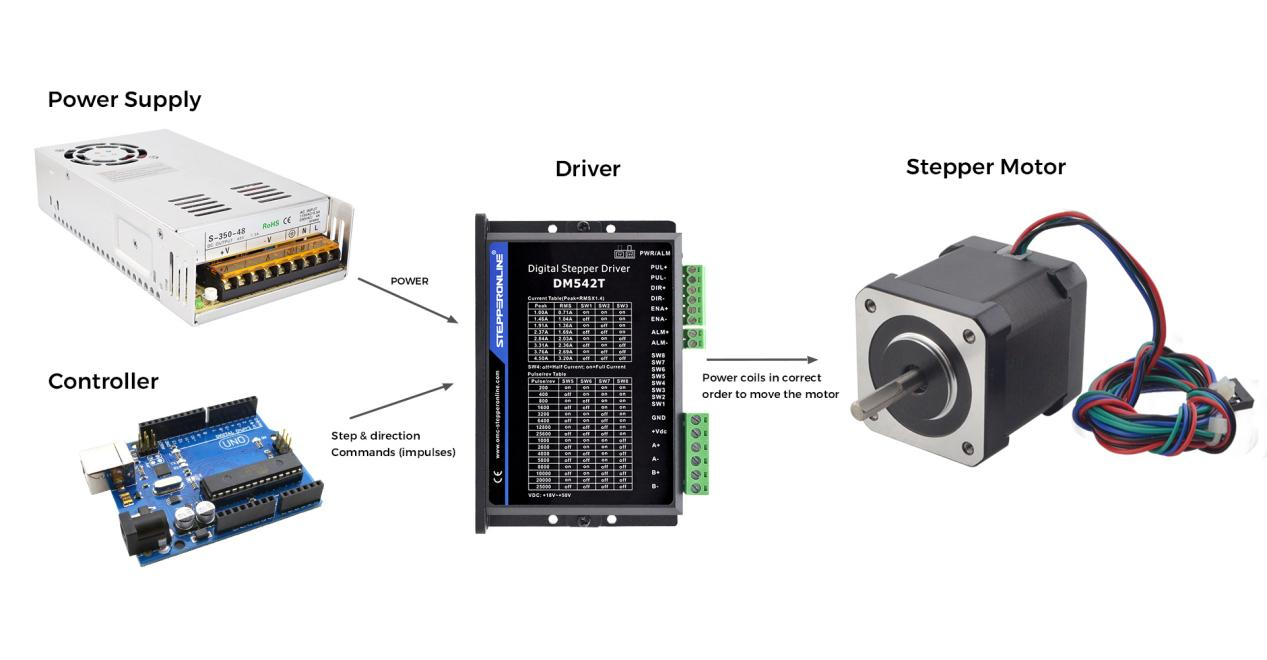
Om een stappenmotor aan te drijven heb je meestal de volgende apparatuur nodig:
- Stappenmotor
- Stappenmotoraansturing
- Controller
- Schakelen van voeding
Hoe u de juiste uitrusting kiest
1. Stappenmotor
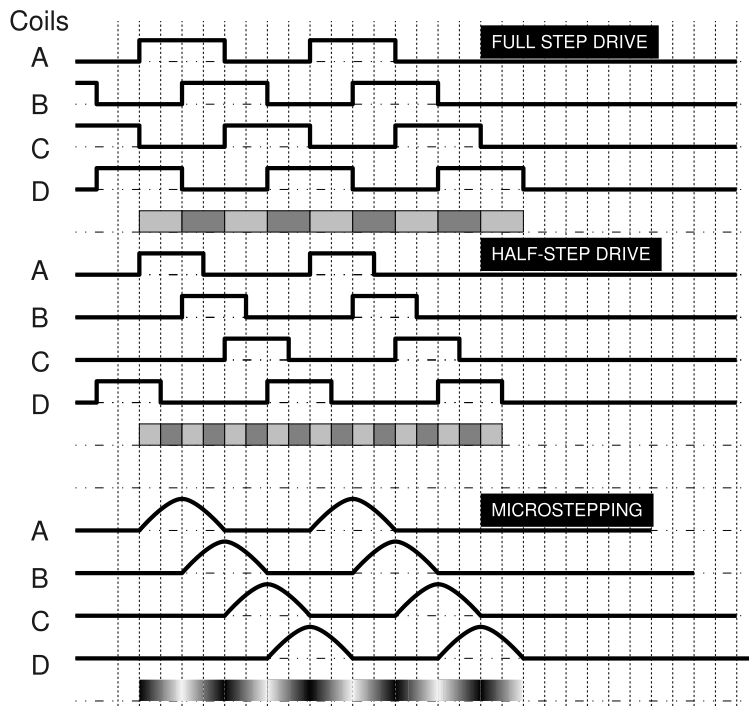
Een stappenmotor is een elektromagnetisch apparaat dat in discrete stappen beweegt. Het heeft verschillende spoelen die in fasen zijn georganiseerd. Wanneer elke fase beurtelings wordt bekrachtigd, zorgt dit ervoor dat de motor gaat stappen. Met stappenmotoren kunt u een nauwkeurige positionering en snelheidsregeling bereiken. Er zijn drie manieren waarop een stappenmotor kan worden aangedreven. Deze drie rijmanieren zijn volledige stapaandrijving, halve stapaandrijving en microstepping.
U moet de juiste stappenmotor selecteren voor uw snelheids- en koppelvereisten op basis van gegevens zoals framegrootte, staphoek, houdkoppel, nominale stroom, aantal kabels en unipolair of bipolair. Ik zal hierna enkele van deze belangrijke concepten uitleggen.
Nema: Nema is geen standaard voor de elektrische eigenschappen van stappenmotoren. Het is eenvoudigweg een standaard voor frontplaten en montagegaten om de uitwisselbaarheid van motoren te vergemakkelijken. De "17" in "NEMA 17" verwijst bijvoorbeeld naar de afmeting van de frontplaat, die in de NEMA-standaard het "nummer" van NEMA is gedeeld door 10 inch. Een NEMA 17-motor heeft dus een frontplaat die ongeveer 4,5 cm breed is.
Staphoek: De staphoek geeft de rotatiehoek van de stappenmotor aan wanneer het besturingssysteem een stappenpulssignaal verzendt. De staphoek van de algemene tweefasige stappenmotor is 0,9°/1,8°, de driefasige stappenmotor is 1,2° en de vijffasige stappenmotor is 0,72°.
Snelheid-koppel: De bedrijfsprestaties van stappenmotoren bij lage snelheden zijn van meer praktisch belang. Stappenmotoren werken doorgaans met snelheden van 300 tot 600 tpm. Aangezien de gebruiker een mechanisch reductieapparaat gebruikt om de last te dragen, wordt de normale snelheid van de motor vaak gekozen op tientallen toeren per minuut om voldoende koppel voor de motor te leveren. In dit geval biedt de motor een hoge kracht, een hoog rendement en een laag geluidsniveau.
Wat het trillingsprobleem betreft, dit zou opgelost moeten worden door de onderverdeling van de aandrijving te vergroten. Onderverdeling is de besturing van de motor door de aandrijving nadat elke door de bovenste computer verzonden puls is onderverdeeld door een vermenigvuldiger die door de aandrijving is ingesteld. Simpel gezegd is dit de verkleining van de staphoek van de motor met de onderverdelingsvermenigvuldiger.
Formule voor berekening van motorsnelheid: Motorsnelheid (eenheid: RPM) = pulsfrequentie (eenheid: Hz)*60/onderverdeling.< /p>
Houdkoppel: Het houdkoppel is de hoeveelheid koppel die nodig is om de motor een volledige stap te laten bewegen terwijl de spoelen bekrachtigd zijn en de rotor stilstaat. De stappenmotorwikkeling wordt bekrachtigd, zelfs als de rotor zelf stilstaat. Dit is om de lading op zijn plaats te houden terwijl deze stilstaat.
Asstijl: u moet de fysieke vorm van deze motoras kennen om uw stappenmotor af te stemmen op tandwielen, katrollen en andere externe verbindingen zoals askoppelingen. Er zijn verschillende veel voorkomende vormen. Bovendien moet rekening worden gehouden met de lengte van de schacht.
Enkele veelvoorkomende soorten schachten staan hieronder vermeld:
- Ronde as - ronde as
- "D" as - een "D-vormige" as die handig is voor het monteren van tandwielen met stelschroeven.
- Geared Shaft - een as met een tandwiel erin geëtst.
- Lead-screw as - een as in de vorm van een schroef , gebruikt voor het bouwen van lineaire actuatoren.
Nominale stroom: Dit verwijst naar de piekstroom. Dit is een nuttige specificatie omdat u hiermee een geschikte driver en voeding voor uw stappenmotor kunt selecteren.
2. Stappenmotor driver
Een stappenmotordriver moet over het algemeen worden gebruikt in combinatie met een stappenmotor. Als u dus een stappenmotor koopt, kunt u het beste tegelijkertijd een geschikte driver matchen om de problemen later te verminderen.
Bijna alle stappenmotordrivers gebruiken een standaardprotocol om de motor aan te sturen. Het gebruikt 3 pinnen:
ENABLE - De driver werkt alleen als de ENABLE-pin op LAAG of HOOG wordt getrokken, afhankelijk van de driver.
RICHTING - Bij LAAG draait de motor in de ene richting en bij HOOG in de andere richting. Dit heeft te maken met hoe je de motor aansluit.
STEP - Wanneer de STEP-pin van laag naar hoog gaat, maakt de stepper één stap (of microstap, afhankelijk van de instellingen van de bestuurder).
3. Verantwoordelijke
Stappenmotorcontroller kan pulssignalen met hoge snelheid verzenden en is programmeerbaar. PLC, microcontrollers en andere apparaten zijn veelgebruikte controllers op de markt.
4. Schakelende voeding
Het is beter om een schakelende voeding voor de stappenmotor te gebruiken. Het heeft een sterk anti-interferentievermogen en maakt een breed scala aan schommelingen mogelijk. De stroom moet worden geselecteerd op basis van de grootte van de belasting. Het is noodzakelijk om een bepaalde marge over te laten. De stroom van de stappenmotor is bijvoorbeeld 3A, de stuurbelastingsstroom 2A, de schakelende voeding moet worden geselecteerd van 6A tot 8A.
Typen stappenmotoren, stuurprogramma's en bedradingsschema's
Bipolaire en unipolaire motoren
Stappenmotoren zijn er in twee verschillende typen: unipolair en bipolair. Het grootste verschil tussen beide is dat beide verschillende typen hun eigen wikkelingen hebben, en dat hun respectievelijke wikkelingen de manier beïnvloeden waarop hun stappenmotoren worden aangedreven.
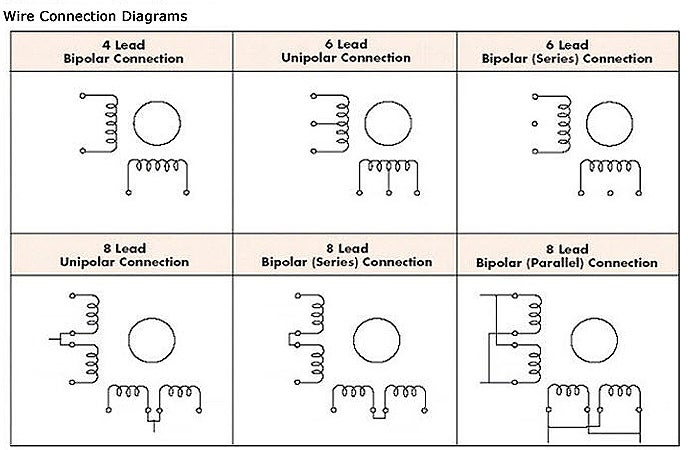
Een 4-draads motor kan alleen worden aangedreven door een bipolaire driver. Een 5-draads motor kan alleen worden aangedreven door een unipolaire driver omdat de middenaftakking intern met elkaar verbonden is. 6-draads en 8-draads motoren kunnen beide typen drivers gebruiken, omdat u zelf kunt bepalen hoe u ze extern aansluit.
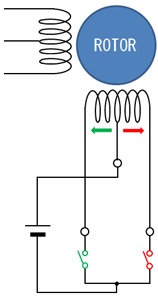
In essentie werken unipolaire en bipolaire motoren op precies dezelfde manier. De elektromagneten openen zich opeenvolgend, waardoor de centrale motoras gaat roteren. Ze verschillen in de manier waarop de spoelen in de motor worden bekrachtigd.
Een unipolaire motor bereikt polariteitsomkering via de centrale aftakking van de spoel, maar bekrachtigt slechts de helft van de spoel tegelijkertijd, waardoor er minder koppel beschikbaar is.
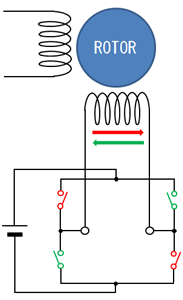
Een bipolaire driver gebruikt een H-brugcircuit om de stroom die door elke fase vloeit feitelijk om te keren. Door elke fase afwisselend te bekrachtigen, kunnen alle spoelen worden gebruikt om de motor te laten draaien.
Een tweefasige bipolaire motor heeft twee sets spoelen. Tweefasige bipolaire motoren hebben vier draden, twee voor elke fase. Bij sommige motoren met flexibele bedrading is het mogelijk om de motor bipolair of unipolair te gebruiken.
Unipolar drive
Bipolar drive
Constante spanningsdriver versus constante stroomdriver
Er zijn twee soorten motoraandrijvingen: unipolair en bipolair, en twee methoden om de stroom die door de motor vloeit te regelen: constante spanning en constante stroom. De constante spanningsdriver levert een vaste spanning aan de motor, terwijl de constante stroomdriver zorgt voor een constante stroom naar de motor door de spanning te manipuleren. Constante spanningsdriver wordt ook wel L/R-driver genoemd. Constante stroomdriver wordt ook wel chopperdriver genoemd.
Vanwege de koppel- en snelheidsbeperkingen van L/R-drivers zijn drivers met constante stroom momenteel populairder. Drivers met constante spanning worden meestal gebruikt voor unipolaire stappenmotoren.
Bij gebruik van drivers met constante spanning is de nominale spanning van de motor voor praktische toepassingen meestal niet relevant. Laat u daarom niet beïnvloeden door stappenmotoren die gebaseerd zijn op zeer lage spanningswaarden. Een belangrijke waarde om op te merken is de nominale stroom. De stepperdrivers van STEPPERONLINE zijn momenteel constante stroomdrivers!
Een driver met constante stroom kan een stappenmotor op een veel hogere spanning laten draaien dan de nominale spanning van de motor. Door de hogere spanning kan de stroom sneller door de stappenmotor stromen, waardoor deze sneller kan draaien en meer koppel kan krijgen. De driver houdt de stroom in de motor onder een vaste waarde, waardoor voorkomen wordt dat de motor doorbrandt. De vaste stroom wordt meestal ingesteld door een trimpot op het aandrijfbord. Hierdoor kunt u de maximale stroom wijzigen, afhankelijk van het benodigde koppel en de nominale stroom van de motorspecificatie. Bovendien betekent een hogere spanning minder warmte.
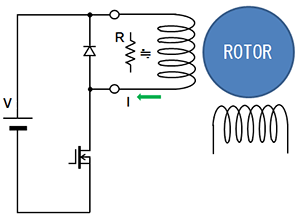
Constant voltage drive
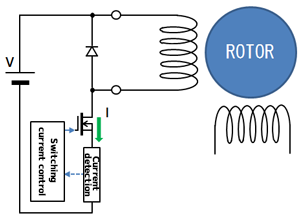
Constant current drive
Hoe een stappenmotor op een driver aan te sluiten
Je moet uitzoeken uit welke draden de spoelparen bestaan. Hier zijn drie manieren om dit uit te zoeken.
1.Je kunt een multimeter gebruiken en de weerstand meten tussen de draden die uit de stappenmotor komen. Als je een lezing hebt, is het een paar. Zo niet, dan is het geen paar.
2.Als je geen multimeter hebt, draai dan de motor terwijl je de draden aanraakt. Welke combinatie het ook moeilijk maakt om de motor te verplaatsen, het is een paar.
3.Het is natuurlijk niet praktisch om alle mogelijke combinaties van aansluitingen met een ohmmeter of op gevoel uit te zoeken. Het is nog steeds het gemakkelijkst om de motor aan te sluiten volgens het gegevensblad. Ervan uitgaande dat u er nog geen heeft, lees dan het modelnummer van de motor en zoek online. Mogelijk moet u contact opnemen met de leverancier voor het gegevensblad voor de motor. STEPPERONLINE levert het juiste gegevensblad, of u kunt contact opnemen met de klantenservice als er nog iets onduidelijk is.
Het volgende diagram toont verschillende wikkelopstellingen: