리드 10.16mm(0.4\") 센서 포함")
 리드 5.08mm(0.2\") 센서 포함")
 리드 2.54mm(0.1\") 센서 포함")
 리드 12.7mm(0.5\") 센서 포함")
 리드 8mm(0.314961\") 센서 포함")
 리드 12.7mm(0.5\") 센서 포함")
 리드 6.35mm(0.25\") 센서 포함")
 리드 6.35mm(0.25\") 센서 포함")
 리드 2.54mm(0.1\") 센서 포함")
 리드 4mm(0.15748\") 센서 포함")
 리드 2.54mm(0.1\") 센서 포함")
 리드 2mm(0.07874\") 센서 포함")
 리드 12.7mm(0.5\") 센서 포함")
 리드 6.35mm(0.25\") 센서 포함")
 리드 2.54mm(0.1\") 센서 포함")
 리드 10.16mm(0.4\") 센서 포함")
 리드 5.08mm(0.2\") 센서 포함")
 리드 2.54mm(0.1\") 센서 포함")
 Nema 34 스테퍼 모터 및 드라이버 및 60V 전원 공급 장치")
 Nema 34 스테퍼 모터 및 드라이버 및 60V 전원 공급 장치")
 Nema 34 스테퍼 모터 및 드라이버 및 60V 전원 공급 장치")
 Nema 23 스테퍼 모터 및 드라이버")
 Nema 34 스테퍼 모터 및 드라이버 및 60V 전원 공급 장치")
 Nema 34 스테퍼 모터 및 드라이버")
 Nema 23 스테퍼 모터 및 드라이버")
 Nema 34 스테퍼 모터 및 드라이버")
 Nema 34 ステッピング モーター & ドライバー")
 Nema 34 스테퍼 모터 및 드라이버 및 60V 전원 공급 장치")











")
")


귀하의 애플리케이션에 적합한 스테퍼 모터를 선택하려면 다음 매개변수를 고려해야 합니다.
유지 토크
유지 토크는 정격 전류가 권선에 인가되고 모터가 회전하지 않을 때의 토크입니다. 일반적으로 스테퍼 모터는 크기에 따라 대략적으로 선택할 수 있습니다. 일반적으로 토크가 0.8N.m 미만일 때는 Nema 8-Nema 17의 nema 크기를 갖는 스테퍼 모터를 선택할 수 있으며, 토크가 1~3N.m 정도일 때는 Nema 23 스테퍼 모터가 더 적합합니다. 토크가 3N.m 이상이면 Nema 34, Nema 42를 선택해야 합니다.
운전 방법
스테퍼 모터의 성능은 다른 구동 모드에 따라 크게 영향을 받기 때문에 구동 방법도 고려해야 합니다. 구동 방식에는 일반적으로 정전압 및 정전류 구동, 유니폴라 및 바이폴라 구동이 있습니다. 유니폴라 및 바이폴라 구동 회로와 비교하여 유니폴라 구동 회로는 4개의 전원 튜브를 사용하며 코일 전류는 코일에서 한 방향으로 흐릅니다. 바이폴라 구동 회로에는 유니폴라의 두 배인 8개의 전원 튜브가 필요합니다. 또한 코일에 순방향과 역방향 전류가 교대로 흐르며 교대로 전도된다. 단, 단시간에 동시 도통하면 전원이 단락되어 강한 전류가 발생합니다. 따라서 단락 방지 회로를 추가할 필요가 있습니다. 바이폴라 구동 회로는 유니폴라보다 복잡하다. 일반적으로 바이폴라 구동은 저속 및 고토크 부하에 사용되며 유니폴라 구동은 고속 구동에 적합합니다.
구동 전압
구동전압은 기계의 사용환경과 관련된 Driver의 입력전압입니다. 12V, 24V, 48V 등 또는 AC 24V, 36V, 50V, 60V, 110V, 220V 등이 될 수 있습니다. 스테퍼 모터의 성능에 대한 전압 선택의 영향은 다음과 같습니다. 전압이 더 높으면 성능 스테퍼 모터가 더 좋으며 특히 모터의 고속 성능이 더 좋습니다.
운전 전류
구동 전류는 스테퍼 모터의 단상 권선 양단의 전류입니다. 구동 전류는 스테퍼 모터가 이 전류에서만 작동할 수 있다는 것을 의미하지 않으며 구동 전류보다 크거나 구동 전류보다 작을 수 있습니다.
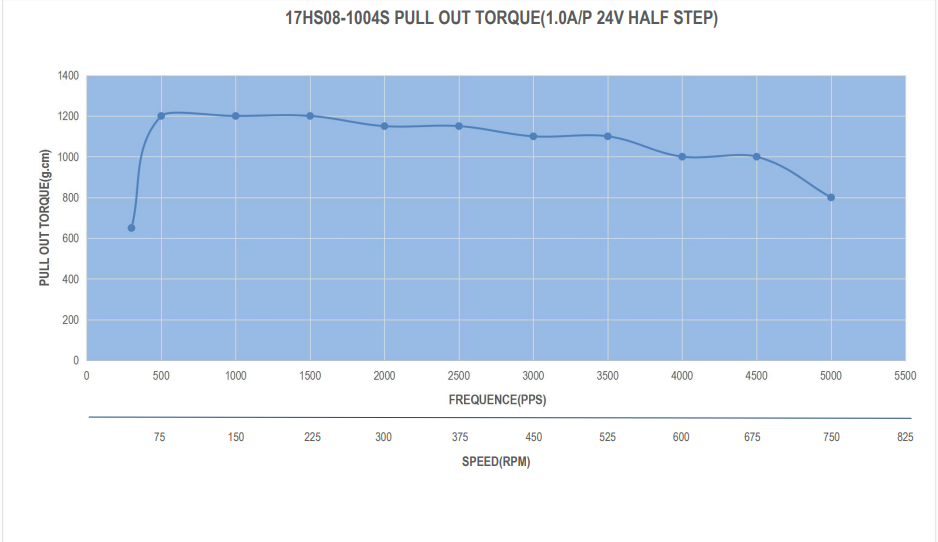
토크 주파수 특성
토크 주파수 특성은 스테퍼 모터의 토크와 주파수 사이에 그려진 곡선입니다. 이것은 스테퍼 모터의 가장 중요한 동적 곡선일 뿐만 아니라 스테퍼 모터를 선택하는 기본적인 기초이기도 합니다. 스테퍼 모터의 동적 토크는 스테퍼 모터가 작동 중일 때의 평균 전류에 따라 달라집니다. 평균 전류가 클수록 스테퍼 모터 출력 토크가 커집니다. 스테퍼 모터 출력 토크는 속도에 반비례합니다. 즉, 스테퍼 모터의 출력 토크는 저속에서 크고, 출력 토크는 고속에서 작습니다.
단계
위상은 스테퍼 모터의 코일 그룹 수를 나타냅니다. 예를 들어 2상 스테퍼 모터에는 2개의 코일 그룹이 있고 3상 스테퍼 모터에는 3개의 코일 그룹이 있습니다. 위상이 다른 스테퍼 모터는 작동 효과가 다릅니다. 2상 스테퍼 모터는 0.9 및 1.8 1.8도 스텝 각도를 제공할 수 있고, 3상 모터는 1.2도 스텝 각도를 제공할 수 있습니다. 대부분의 경우 2상 스테퍼 모터가 더 자주 사용됩니다. 그러나 고속 및 높은 토크의 작업 환경에서는 3상 스테퍼 모터를 선택하는 것이 더 실용적입니다.