Piombo 5.08mm(0.2\") con Sensore")
 Piombo 10,16mm(0.4\") con sensore")
 Piombo 2.54mm(0.1\") con Sensore")
 Piombo 12.7mm(0.5\") con Sensore")
 Piombo 8mm(0.314961\") con Sensore")
 Piombo 12.7mm(0.5\") con Sensore")
 Piombo 6.35mm(0.25\") con Sensore")
 Piombo 6.35mm(0.25\") con Sensore")
 Piombo 2.54mm(0.1\") con Sensore")
 Piombo 2.54mm(0.1\") con Sensore")
 Piombo 4mm(0.15748\") con Sensore")
 Piombo 2mm(0.07874\") con Sensore")
 Piombo 12.7mm(0.5\") con Sensore")
 Piombo 6.35mm(0.25\") con Sensore")
 Piombo 2.54mm(0.1\") con Sensore")
 Piombo 10.16mm(0.4\") con Sensore")
 Piombo 5.08mm(0.2\") con Sensore")
 Piombo 2.54mm(0.1\") con Sensore")
 e alimentatore 60V")
 e alimentatore 60V")
 e alimentatore 60V")
")
 Motore passo-passo Nema 34 e driver e alimentatore 60V")
 Motore passo-passo e driver Nema 34")
")
 Nema 34 Motore passo-passo e driver")
")
 Nema 34 Motore Passo Passo & Azionamento & Alimentazione 60V")















Il controllo dei motori stepper è un argomento ampio e questo articolo è una guida semplificata per principianti sull’uso dei motori stepper. Esso riguarda le modalità di funzionamento dei motori stepper. Il suo scopo è aiutare i principianti a far funzionare i motori stepper.
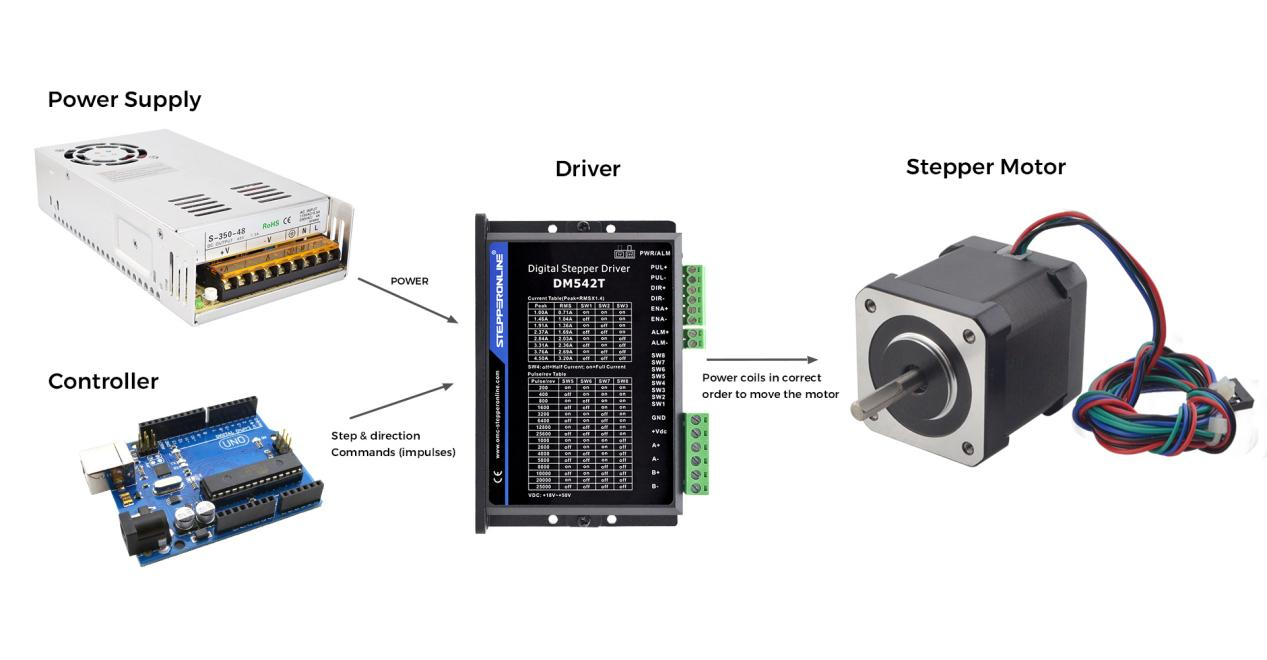
per guidare un motore stepper è generalmente necessario il seguente equipaggiamento:
- Motore Stepper
- Stepper motor driver
- Controller
- Commutazione dell’alimentazione
Come scegliere l’apparecchiatura corretta
1. Motore Stepper
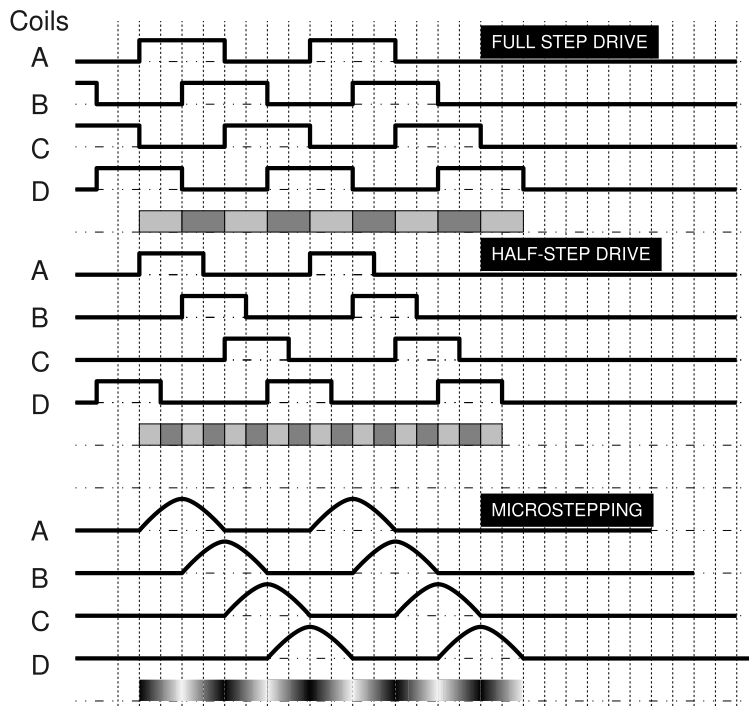
un motore stepper è un dispositivo elettromagnetico che si muove in scale discrete. Esso ha varie bobine che sono organizzate in fasi. Quando ogni fase viene alimentata a turno, fa muovere il motore. Con i motori stepper è possibile ottenere un posizionamento preciso e un controllo della velocità. Ci sono tre modi principali per guidare un motore stepper. Queste tre modalità di guida sono full step drive, half step drive e microstepping.
devi selezionare il motore del passo giusto per i tuoi requisiti di regime e coppia in base a dati come dimensione del telaio, angolo del passo, coppia di mantenimento, corrente nominale, numero di condotti e unipolare o bipolare. Spiegherò ora alcuni di questi concetti importanti.
Nema:Il Nema non è uno standard per le caratteristiche elettriche dei motori stepper. Si tratta semplicemente di una norma per le piastre di taglio e per i fori di montaggio che facilita l’intercambiabilità dei motori. Per esempio, "17" in "NEMA 17" si riferisce alla dimensione della piastra di faccia, che nello standard NEMA è il "numero" di NEMA diviso 10 pollici. Quindi, un motore NEMA 17 ha una faccia piatta larga circa 1,7 pollici.
Angolo del passo: l’angolo del passo indica l’angolo di rotazione del motore del passo quando il sistema di controllo invia un segnale dell’impulso del passo. L’angolo di passo del motore stepper generale a due fasi è di 0,9 gradi / 1,8 gradi, il motore a tre fasi è 1,2 gradi e il motore a cinque fasi è 0,72 gradi.
coppia di velocità : le prestazioni di funzionamento dei motori stepper a bassa velocità sono di maggiore importanza pratica. I motori Stepper funzionano di norma a velocità da 300 a 600 giri/min. Dato che l’utilizzatore utilizza un dispositivo di riduzione meccanica per trasportare il carico, la velocità normale del motore è spesso scelta a decine di giri al minuto per fornire una coppia sufficiente al motore. In questo caso, il motore fornisce forza elevata, efficienza elevata e basso rumore.
per quanto riguarda il problema delle vibrazioni, esso deve essere risolto aumentando la suddivisione in trazione. Suddivisione: il controllo del motore da parte dell’unità di comando dopo ogni impulso inviato dall’elaboratore superiore è suddiviso in un moltiplicatore stabilito dall’unità di comando. In parole povere, è la riduzione dell’angolo di passo del motore mediante il moltiplicatore di compartimentazione.
formula di calcolo del regime del motore: regime del motore (unità: RPM) = frequenza di impulso (unità: Hz)*60/ suddivisione.
coppia di tenuta : la coppia di tenuta è la quantità di coppia necessaria per muovere il motore a un gradino a fondo quando i rotoli sono alimentati e il rotore è fermo. L’avvolgimento del motore del passo-passo è sotto tensione anche se il rotore stesso è fermo. Questo per mantenere il carico in posizione mentre è fermo.
stile albero : è necessario conoscere la forma fisica di questo albero motore per far corrispondere il motore del passo agli ingranaggi, alle pulegge e ad altri collegamenti esterni come gli organi di accoppiamento. Ci sono diverse forme in comune. Inoltre, deve essere presa in considerazione la lunghezza dell’albero.
alcuni tipi comuni di alberi sono elencati di seguito :
- Round Shaft - round shaped shaft
- "D" Shaft - a "D-shaped" shaft that is useful for mounting gears with set screws.
- Albero orientato - un albero con la marcia inserita.
- albero a vite al piombo - un albero a forma di vite, usato per costruire attuatori lineari.
corrente nominale : si riferisce alla corrente di picco. Questa è una specifica utile perché ti permette di selezionare un driver e un alimentatore adatti per il motore stepper.
2. Guidatore del Stepper
il guidatore del Stepper deve essere usato generalmente in combinazione con il motore del Stepper, quindi quando si acquista un motore del Stepper, è meglio abbinare un conducente adatto allo stesso tempo per ridurre il problema più tardi.
quasi tutti i guidatori del stepper usano un protocollo standard per controllare il motore. Usa 3 perni :
abilita - il driver opererà solo quando il perno di abilita è premuto in basso o in alto, a seconda del driver.
direzione - se basso, il motore ruota in una direzione e alto nell’altra. Questo è legato a come si collega il motore.
passo - ogni volta che il perno del passo va da basso a alto, il passo fa un passo (o un micropasso, a seconda delle impostazioni del driver).
3. Controllore
il controllore del motore del Stepper è in grado di inviare segnali di impulso ad alta velocità ed è programmabile. PLC, microcontrollori e altri dispositivi sono controllori comuni sul mercato.
4. Alimentazione di commutazione
è meglio usare il sistema di commutazione dell’alimentazione per il motore stepper. Ha una forte capacità antiinterferenza e consente un’ampia gamma di fluttuazioni. La corrente deve essere selezionata in base alle dimensioni del carico. È necessario lasciare un certo margine di manovra. Per esempio, la corrente del motore stepper è 3A, la corrente del carico di controllo 2A, l’alimentazione di commutazione deve essere selezionata tra 6A e 8A.
tipi di motori stepper, driver e schemi di cablaggio
motori bipolari e unipolari
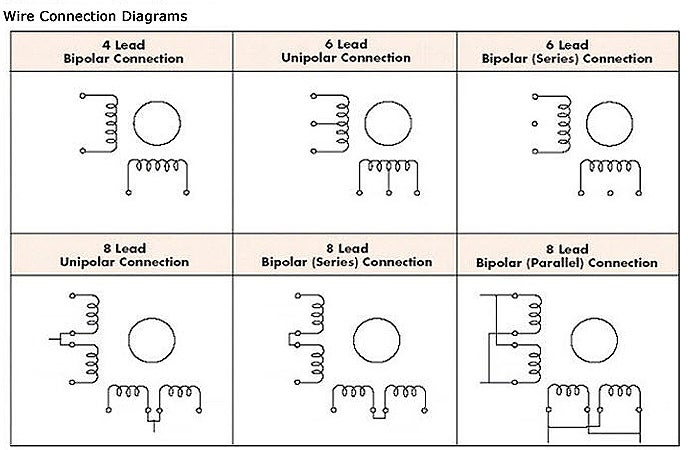
I motori Stepper sono di due tipi diversi: unipolare e bipolare. La differenza maggiore tra i due tipi è che entrambi i diversi tipi hanno le proprie modalità di estrazione, e le rispettive modalità di estrazione sono quelle che influenzeranno il modo in cui vengono guidati i motori stepper.un motore A 4 fili può essere guidato solo da un conducente bipolare. Un motore A 5 fili può essere guidato solo da un conducente unipolare perché il rubinetto centrale è collegato internamente. I motori a 6 e 8 fili possono usare entrambi i tipi di driver perché puoi decidere come connetterli esternamente.
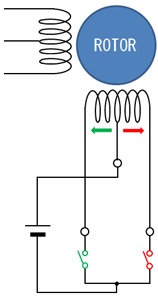
In sostanza, i motori unipolari e bipolari funzionano esattamente allo stesso modo. Gli elettromagneti si aprono in modo sequenziale, inducendo l’albero motore centrale a ruotare. Essi differiscono nel modo in cui i rotoli all’interno del motore sono alimentati.
un motore unipolare ottiene l’inversione di polarità attraverso il rubinetto centrale del rotolo, ma solo la metà del rotolo viene alimentata allo stesso tempo, quindi ha meno coppia disponibile.
un conducente bipolare usa un circuito A ponte h per invertire il flusso di corrente in ogni fase. Alimentando alternativamente ogni fase, tutti i rotoli possono essere utilizzati per girare il motore.
un motore bipolare A due fasi ha due serie di bobine. I motori bipolari a due fasi hanno quattro fili, due per ogni fase. Per alcuni motori con cablaggio flessibile, è possibile far funzionare il motore come bipolare o unipolare.
Unipolar drive
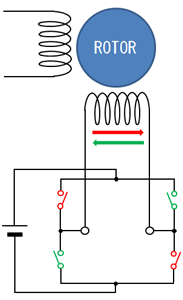
Bipolar drive
Driver di tensione costante vs. driver di corrente costante
ci sono due tipi di motrici: unipolare e bipolare, e due metodi per controllare la corrente che scorre attraverso il motore: tensione costante e corrente costante. Il conducente a tensione costante fornisce una tensione fissa al motore, mentre il conducente a tensione costante assicura una corrente costante al motore manipolando la tensione. Il conducente a tensione costante è anche noto come conducente L/R. Il driver di corrente costante è anche noto come driver chopper.
a causa delle limitazioni di coppia e velocità dei L/R, i conducenti a corrente costante sono attualmente più popolari. I motori a passo unipolare sono i motori a tensione costante più frequentemente utilizzati.
quando si usano driver a tensione costante, la tensione nominale del motore è per lo più irrilevante per applicazioni pratiche. Non essere quindi influenzati da motori stepper a tensione molto bassa. Un valore importante da notare è la corrente nominale. I guidatori STEPPERONLINE sono dei guidatori attuali costanti!
un conducente di corrente costante può far girare un motore stepper ad una tensione molto più alta della tensione nominale del motore. La tensione più elevata consente alla corrente di fluire più velocemente nel motore del stepper, il che gli permette di girare più velocemente e ottenere più coppia. Il conducente mantiene la corrente nel motore al di sotto di un valore fisso, il che impedisce al motore di spegnersi. La corrente fissa è generalmente regolata da un vaso di regolazione posto sul quadro di comando. Questo permette di cambiare la corrente massima in funzione della coppia necessaria e della corrente nominale della specifica del motore. Inoltre, una tensione più elevata significa meno calore.
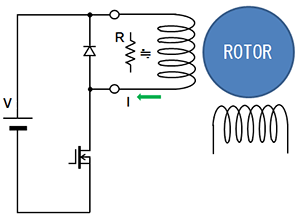
Constant voltage drive
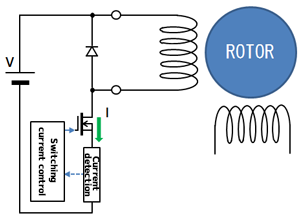
Constant current drive
Come collegare un motore stepper ad un driver
devi capire quali fili formano le coppie di bobine. Ecco tre modi per capirlo.
1. Si può usare un multimetro e misurare la resistenza tra i fili provenienti dal motore del stepper. Se avete una lettura, è una coppia. Se no, non è una coppia.
2. Inoltre, se non avete un multimetro, girate il motore toccando i fili. Qualunque combinazione renda difficile muovere il motore, è una coppia.
3. Naturalmente, non è pratico risolvere tutte le possibili combinazioni di connessioni con un ohmmetro o per sensazione. È ancora più facile collegare il motore secondo la scheda tecnica. Supponendo che non ne abbiate già uno, leggete il numero del modello dal motore e cercate online. Può essere necessario contattare il fornitore per ottenere la scheda informativa relativa al motore. STEPPERONLINE fornisce il foglio di dati appropriato, o puoi contattare il servizio clienti se qualcos’altro non è ancora chiaro.
il seguente diagramma mostra varie modalità di avvolgimento :