























































































Che cos'è un servomotore?

Definizione di servomotore
Il termine "servo" si riferisce al meccanismo di controllo e deriva da "servus", la parola latina che significa schiavo. Il nome dei servomotori deriva dal fatto che si può contare sul fatto che funzionino "esattamente come indicato".
Un motore in grado di controllare parametri quali la posizione e la velocità viene definito un servomotore, indipendentemente dal modo in cui viene effettuato il controllo. Di conseguenza, il termine viene talvolta utilizzato per includere i motori passo-passo e i motori senza nucleo.
Nel contesto delle nostre intenzioni, tuttavia, un servomotore sarà definito come un motore dotato di un encoder (rilevatore di movimento rotatorio) e di un driver che utilizza le informazioni dell'encoder per controllare la velocità e la posizione (angolo di rotazione).
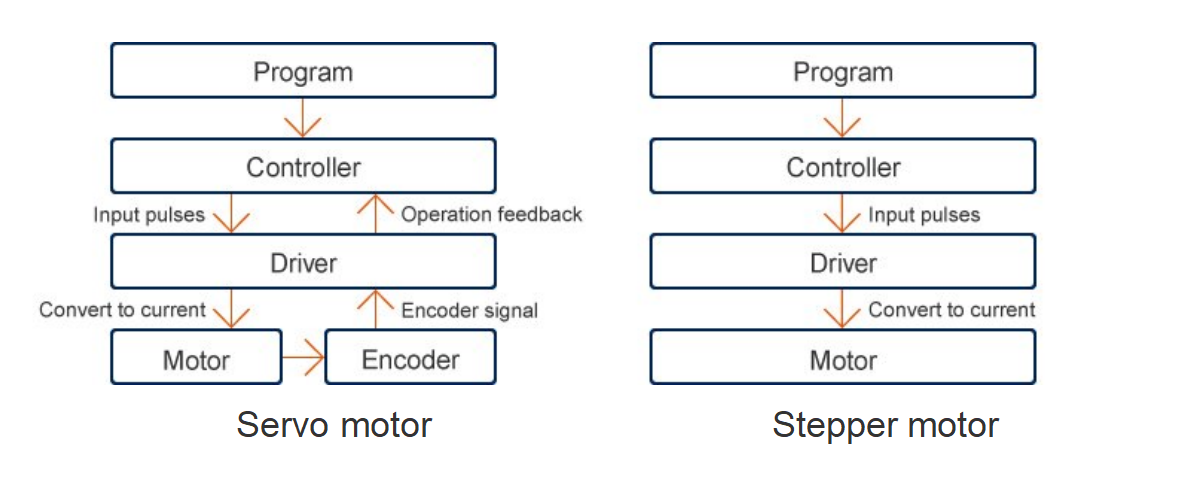
Differenze tra servomotori e motori passo-passo
Come i servomotori, i motori passo-passo sono in grado di controllare il loro angolo di rotazione in risposta a input esterni. Possono quindi essere utilizzati anche per macchine di posizionamento e applicazioni simili. Ma ci sono molte differenze tra questi due tipi di motori.
1. Meccanismo di controllo
I servomotori sono dotati di un encoder (rilevatore di movimento rotatorio) che individua la loro posizione di rotazione e fornisce un controllo di retroazione della posizione del motore. In questo modo si ottiene una precisa precisione di arresto e il motore è in grado di tornare alla posizione originale in caso di deviazione dalla posizione del motore al momento dell'arresto. Per i motori passo-passo, invece, l'angolo di rotazione del motore è proporzionale al numero di impulsi di ingresso. Pertanto, controlla la posizione in base al numero di impulsi di ingresso ricevuti dal controllore. Sebbene si eviti la necessità di un sensore di posizione, ciò comporta anche l'assenza di mezzi per rilevare le deviazioni di posizione. Ad esempio, variazioni impreviste del carico possono causare la desincronizzazione del motore (il che significa che il motore ruota con un angolo diverso da quello specificato dall'ingresso).
2. Coppia e velocità
I servomotori possono funzionare a velocità elevate e fornire una coppia affidabile in un'ampia gamma di velocità, da bassa ad alta. I motori passo-passo possono fornire una coppia elevata a basse velocità, ma la loro coppia diminuisce all'aumentare della velocità, rendendoli meno adatti al funzionamento ad alta velocità.
3. Costo
Poiché i servomotori richiedono un encoder rotativo e un servocontrollore (driver), sono più costosi dei motori passo-passo.
Per ulteriori informazioni sui servomotori e sui motori passo-passo, fare clic su: Servomotore vs motore passo-passo.
Storia dei servomotori
A partire dagli anni '50, l'interesse per l'automazione delle fabbriche ha iniziato a crescere negli Stati Uniti, inizialmente in settori come i nastri trasportatori, i macchinari automatici e i robot industriali. I primi macchinari automatizzati e robot industriali tendevano a utilizzare tecniche idrauliche o pneumatiche per controllare il posizionamento degli attuatori, ma soffrivano di problemi in termini di precisione, affidabilità operativa, tubazioni associate, perdite di olio idraulico o di aria.
Successivamente, con il miglioramento della tecnologia, negli anni '50 e '60 è aumentato l'uso dei servomotori a corrente continua, che hanno iniziato a essere installati nei robot industriali per sostituire i fastidiosi meccanismi idraulici e pneumatici.
Insieme ai progressi dei robot industriali sono arrivati anche i grandi progressi tecnologici dei servomotori. I servomotori in c.a. sono diventati disponibili negli anni Ottanta. I loro vantaggi pratici includono la possibilità di rendere i robot più piccoli e leggeri e, di conseguenza, i servomotori sono ampiamente utilizzati nei moderni macchinari industriali.

Tipi di servomotori
I servomotori possono essere suddivisi in servomotori CC e servomotori CA.
1. Servomotori CC
Sono servomotori azionati da motori DC (corrente continua) spazzolati. I motori CC sono più facili da controllare rispetto ai motori CA. Sono molto diffusi per le loro dimensioni ridotte e per il loro basso costo, ma negli ultimi tempi l'uso dei motori CC è diminuito a causa dei progressi della tecnologia di controllo dei motori CA.
2. Servomotori CA
Sono servomotori azionati da motori a corrente alternata (CA). Sebbene siano più complicati da controllare rispetto ai motori a corrente continua, i progressi della tecnologia di controllo li hanno resi il tipo di servomotore più comune.
In base al loro meccanismo di azionamento, i servomotori a corrente alternata possono essere suddivisi in motori sincroni (SM) e motori a induzione (IM). Si distinguono in base alla presenza o meno di un magnete permanente.
Gli SM contengono un magnete permanente. Per aumentare la potenza del motore, è necessario aumentare l'uso dei magneti permanenti, che sono costosi e il costo del motore diventa elevato. Per questo motivo, sono ampiamente utilizzati in applicazioni di bassa potenza (fino a 10kW). Tuttavia, con la disponibilità di magneti permanenti ad alte prestazioni negli ultimi anni, i servomotori sincroni in c.a. sono ora la scelta preferita.
I motori IM non utilizzano magneti permanenti e tendono a essere utilizzati per applicazioni di potenza superiore (10kW o più).

Applicazioni dei servomotori
Grazie alle loro caratteristiche di precisione di posizionamento, i servomotori sono ampiamente utilizzati in applicazioni quali robot industriali e macchinari di precisione. Esempi di applicazioni sono i seguenti:
- Giunti di robot industriali
- Giunti per robot umanoidi
- Controllo delle apparecchiature nelle macchine per la lavorazione degli alimenti
- Controllo delle apparecchiature nelle macchine per il confezionamento
- Azionamenti a nastro nei sistemi di trasporto
- Porte automatiche nei treni
- Tavole X-Y utilizzate nelle macchine per l'ispezione di LCD e semiconduttori
- Presse/alimentatori di rulli
- Stadi rotanti per macchine utensili o sistemi di ispezione
- Controllo di presse
- Controllo di macchine per l'incollaggio
- Controllo di macchine per lo stampaggio della plastica
- Controllo di macchine per il divertimento
- Radiocomando e altre applicazioni hobbistiche
- Macchine per il rivestimento o la deposizione di vapore
- Macchine per la pulitura a rotazione di LCD e semiconduttori








