Teilenummerierung von Linearmotoren
Jeder Linearmotor hat eine eindeutige Katalognummer, um die Teileidentifikation für die Identifizierung und Nachbestellung zu erleichtern.
Die folgende Tabelle dient als schnelle Referenz zur Identifizierung von Motortyp, Abmessungen und Leitspindellänge usw.

| ① Motorgröße | Code[NEMA] | 6 | 8 | 11 | 14 | 17 | 23 | 24 | 34 |
|---|---|---|---|---|---|---|---|---|---|
| Größe[mm] | 14x14 | 20x20 | 28x28 | 35x35 | 42x42 | 57x57 | 60x60 | 86x86 | |
| ② Linearer Aktuatortyp |
E = Externer Linearantrieb N = Nicht-gefangener Linearaktuator C = Linearaktuator mit Elektrozylinder (unverlierbar). |
||||||||
| ③ Motorlänge | XX = X.Xinch, zB. 15 = 1,5 Zoll | ||||||||
| ④ Schrittwinkel |
S = 1,8° M = 0,9° |
||||||||
| ⑤ Nennstrom / Phase | XXX = X.XX [A]/Phase, z. 200 = 2,0 A | ||||||||
| ⑥ Anzahl der Anschlussdrähte |
4 = 4 fliegende Leads 6 = 6 fliegende Leads 8 = 8 fliegende Leads |
||||||||
| ⑦ Kugelumlaufspindel | B ist eine Kugelumlaufspindel, keine ist eine Trapezgewindespindel | ||||||||
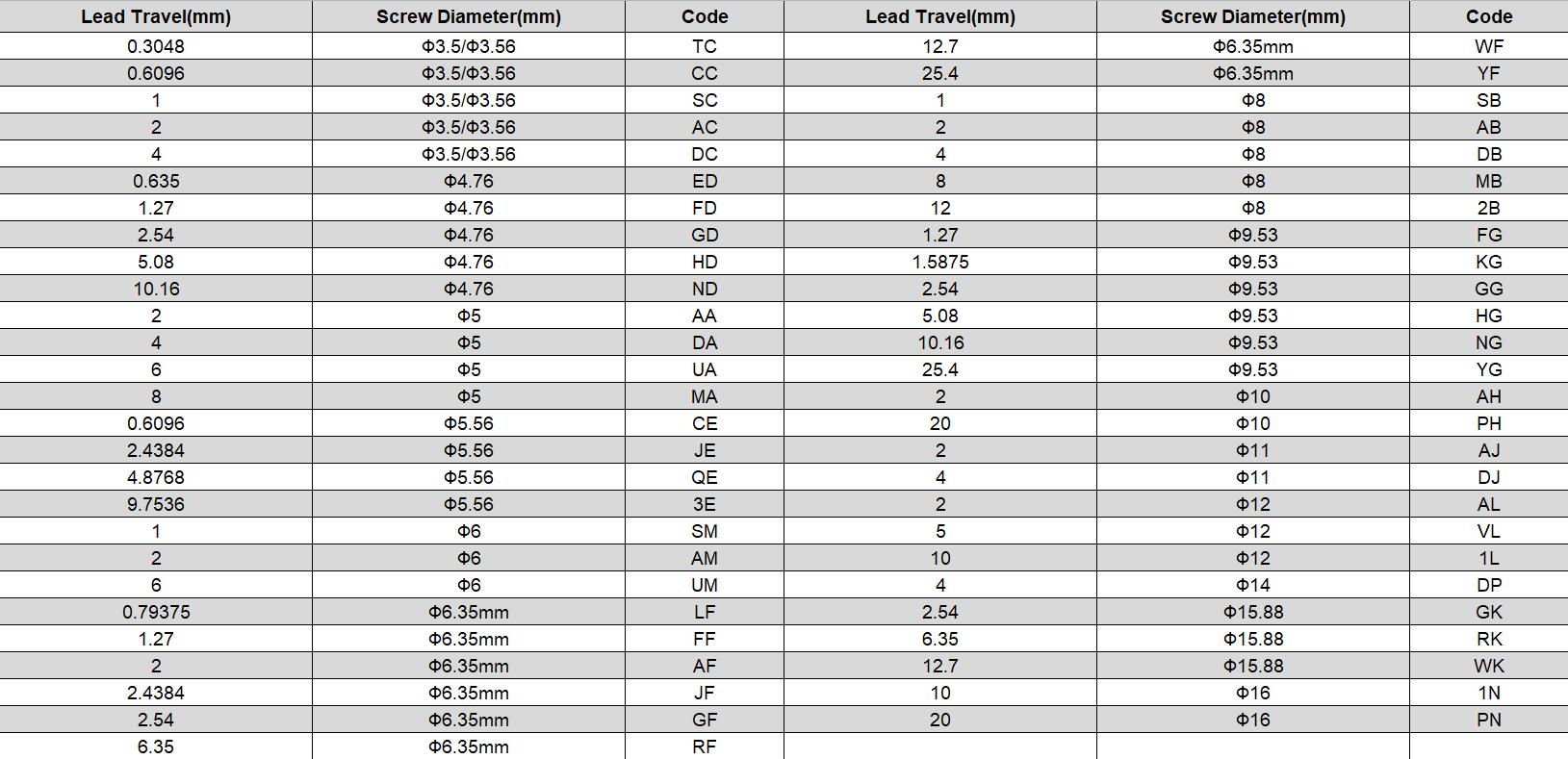
| ⑧ Leitspindel-/Kugelumlaufspindel-Code | Bitte sehen Sie sich die Auswahltabelle für die Leitspindelcodes einzeln an | ||||||||
| ⑨ Länge der Leitspindel | XXX = XXXmm Gewindespindellänge |
||||||||
| ⑩ Fadenrichtung | R = Richtig
L= Links |
||||||||
| ⑪ Nussstil |
S = Standard-Flanschmutter [Externer Linearantrieb] A = Anti-Backlash-Mutter [External Linear / Non-Captive Linear] B = Messingmutter D = Anti-Spiel-Mutter aus Messing |
||||||||
| ⑫ Encoder-Option | OE = Optischer Encoder, 1K=1000PPR(4000CPR) ME = Magnetischer Encoder, 1K=1000PPR(4000CPR) P = Manueller Knopf B = Bremse X = hintere Welle R = Encoder bereit |
||||||||
| ⑬ Benutzerdefinierter Motor | CX=Custom Code, [X steht für Nummer, nummeriert von 1, entsprechend der Reihenfolge] Hier bestellen | ||||||||
Leitspindelcode