
























































































Bitte folgen Sie den folgenden Schritten, um den Schrittmotortreiber an den Arduino anzuschließen:
1. Verbinden Sie DIR+ und PUL+ des Treibers mit dem digitalen Port des Arduino, z.B. PIN8 und PIN9.
2. Verbinden Sie PUL- und DIR- mit dem GND des Arduino.
3. Schreibe ein Programm auf deinem Computer, indem du PIN8 und PIN9 mit DIR und PUL verbindest.
4. Laden Sie das Programm auf den Arduino und versorgen Sie den Arduino mit einer 5V-Spannungsversorgung.
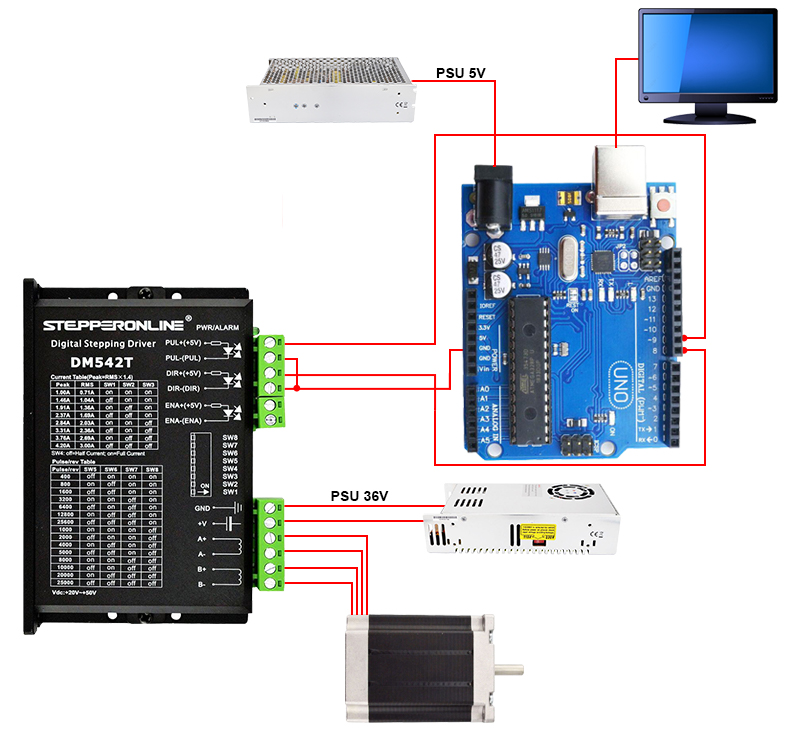
Die folgende schematische Darstellung zeigt den grundsätzlichen Anschluss von Arduino, Schrittmotortreiber, Netzteil und Schrittmotor.
Wir stellen auch einen einfachen Demo-Code zur Verfügung
int x;
void setup()
{
pinMode(9,OUTPUT); // set Pin9 as PUL
pinMode(8,OUTPUT); // set Pin8 as DIR
}
void loop()
{
digitalWrite(8,HIGH); // set high level direction
for(x = 0; x < 400; x++) // repeat 400 times a revolution when setting 400 on driver
{
digitalWrite(9,HIGH); // Output high
delayMicroseconds(500); // set rotate speed
digitalWrite(9,LOW); // Output low
delayMicroseconds(500); // set rotate speed
}
delay(1000); //pause 1 second
digitalWrite(8,LOW); // set high level direction
for(x = 0; x < 400; x++)
{
digitalWrite(9,HIGH);
delayMicroseconds(500);
digitalWrite(9,LOW);
delayMicroseconds(500);
}
delay(1000);
}
