3000rpm 24-70V CC con Modbus RS485")










 Piombo 5.08mm(0.2\") con Sensore")
 Piombo 10,16mm(0.4\") con sensore")
 Piombo 2.54mm(0.1\") con Sensore")
 Piombo 12.7mm(0.5\") con Sensore")
 Piombo 8mm(0.314961\") con Sensore")
 Piombo 12.7mm(0.5\") con Sensore")
 Piombo 6.35mm(0.25\") con Sensore")
 Piombo 6.35mm(0.25\") con Sensore")
 Piombo 2.54mm(0.1\") con Sensore")
 Piombo 2.54mm(0.1\") con Sensore")
 Piombo 4mm(0.15748\") con Sensore")
 Piombo 2mm(0.07874\") con Sensore")
 Piombo 12.7mm(0.5\") con Sensore")
 Piombo 6.35mm(0.25\") con Sensore")
 Piombo 2.54mm(0.1\") con Sensore")
 Piombo 10.16mm(0.4\") con Sensore")
 Piombo 5.08mm(0.2\") con Sensore")
 Piombo 2.54mm(0.1\") con Sensore")
 e alimentatore 60V")
 e alimentatore 60V")
 e alimentatore 60V")
")
 Motore passo-passo Nema 34 e driver e alimentatore 60V")
 Motore passo-passo e driver Nema 34")
")
 Nema 34 Motore passo-passo e driver")
")
 Nema 34 Motore Passo Passo & Azionamento & Alimentazione 60V")















Un motore stepper è un dispositivo elettromeccanico che converte l’energia elettrica in energia meccanica. Allo stesso tempo, un motore stepper è un motore senza spazzole e sincrono che può dividere una rotazione completa in un numero enorme di gradini. Quando un motore stepper è applicato con impulsi di comando elettrici nella sequenza appropriata, l’albero o il mandrino del motore stepper ruota in fasi distinte, permettendo un controllo preciso della posizione del motore senza alcun meccanismo di retroazione, fintanto che il motore è dimensionato per l’applicazione.
1. Costruzione di motori stepper
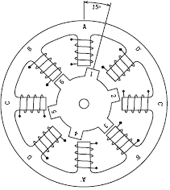
I motori Stepper sono generalmente costituiti da coperchi di estremità anteriore e posteriore, cuscinetti, albero centrale, nocciolo del rotore, nocciolo dello statore, assemblaggio dello statore, rondelle ondulate, viti e altre parti. Le due parti principali di un motore a passo sono lo statore e il rotore. Sono entrambi composti da materiali magnetici con sei e quattro poli magnetici rispettivamente su di essi. I sei poli magnetici dello statore hanno su di essi degli avvolgimenti di comando e i due poli opposti formano una fase.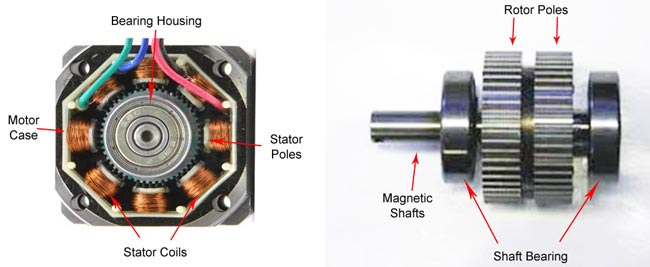
2. Types of Stepper Motors
Esistono tre tipi fondamentali di motori stepper, rotore reattivo: motore a resistenza variabile (VR), rotore attivo: motore stepper magnete permanente (PM), Combinazione di VR e PM: motore a passo ibrido (HY)
Motori stepper a resistenza variabile
I motori stepper a resistenza variabile sono il tipo più semplice di stepper e sono costituiti da rotore multidente in ferro dolce e da uno statore avvolto. Entrambi i poli sono magnetizzati quando la corrente cc è applicata all’avvolgimento dello statore.quando i denti del rotore sono attratti dai poli dello statore sotto tensione, si verifica rotazione. Poiché i magneti dei motori stepper a resistenza variabile sono più piccoli e più leggeri di quelli dei motori stepper a magnete permanente, sono più veloci. Minore è l’area tra il rotore e le marce stator di un motore a resistenza variabile, minore è la perdita di forza magnetica.
per questo tipo di motore stepper, sebbene la struttura sia semplice e facile da controllare, la risoluzione è bassa e la coppia è piccola.
Permanent magnet stepper motors
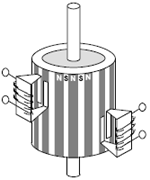
I magneti permanenti sono incorporati nella struttura motoria del stepper magnete permanente. Il cambiamento di posizione del rotore sarà causato da un cambiamento nella direzione corrente delle bobine, che cambierà i poli magnetici. Il rotore ruoterà 90 gradi man mano che la direzione della corrente viene modificata correttamente. Questo singolo passo del motore, sebbene utile in alcune applicazioni, sarebbe molto ampio e impreciso. Quindi, i motori magnete permanenti realmente esistenti hanno più poli del rotore e diversi magneti montati sul rotore per aumentare il numero di passi e la precisione di posizionamento.
i poli del rotore magnetizzato forniscono una maggiore intensità di flusso magnetico e, di conseguenza, i motori a magnete permanente presentano caratteristiche di coppia migliori dei motori stepper a resistenza variabile. La semplice costruzione produce un motore a prezzo moderato con risoluzione piuttosto bassa.
motori ibridi stepper
I motori ibridi stepper sono uno dei tipi più usati di motori stepper nell’industria. I motori stepper ibridi combinano le migliori caratteristiche di riluttanza variabile e i motori stepper a magnete permanente, per cui sono più costosi. I motori ibridi stepper offrono prestazioni migliori in termini di risoluzione dei gradini, coppia e regime.
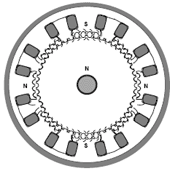
Il rotore di un motore ibrido a gradini è costituito da magneti permanenti, ma, a differenza dei modelli di cui sopra, i magneti non sono montati radialmente ma magnetizzati assialmente. Il rotore è costituito normalmente da due anelli magnetizzati contrapposti posti sull’albero motore. Ha inserito scanalature in ciascun anello per formare denti rotori.
il numero di passi completi per giro può essere calcolato dalla seguente formula:
- SPR = NR x Ø
- Where: SPR = number of steps per revolution
- NR = total number of rotor teeth (total for both yokes)
- Ø = number of motor phases
- or: NR = SPR/Ø
| Comparisons | Variable reluctance stepper motor(VR) | Permanent magnet stepper motor (PM) | Hybrid stepper motor(HB) |
| Cost | Medium | Relatively cheap | Relatively expensive |
| Design Structure | Simple | Medium | Relatively complex |
| Resolution | Step angle: 1.8°, 0.9° or less | Step angle: 3°~30° | Step angle: 1.8°, 0.9° or less |
| Torque speed curve | No significant torque drop at high speed | Large torque at low speed, significant torque drop at high speed | Large torque at low speed, significant torque drop at high speed |
| Noise | More noise | Less noise | More noise (better with microstep subdivision) |
| Heat generation | High temperature rise (need heat sink) | Low temperature rise | Low temperature rise |
| Microstep subdivision | Usually operate in full step only | Ferrite or neodymium-iron-boron magnets | Neodymium-iron-boron magnets |
| Rotor material | Silicon steel sheet (no permanent magnets) | Full step, half step, micro step | Full step, half step, micro step |
| Rotor surface | Multi-tooth structure on the rotor outer surface | Smooth and toothless | Multi-tooth structure on the rotor outer surface |
| Magnetic torque | Generates only attractive torque | Both attractive and repulsive torque during operation | Both attractive and repulsive torque during operation |
3. Tipi di cablaggio
Un’altra classificazione dei motori stepper si basa sul tipo di avvolgimento del motore a due fasi. I motori Stepper sono classificati in motori unipolari e bipolari in base a questa classificazione.la principale differenza è che i motori unipolari funzionano con una polarità di corrente (tensione), mentre i motori bipolari funzionano con due polarità, il che significa che la direzione del flusso di corrente nelle bobine è variabile. Un’altra differenza consiste nel fatto che le bobine devono essere collegate per trasferire la potenza dalla fine di un rotolo all’inizio dell’altro. Questo metodo di connessione permette di usare una polarità di corrente (tensione). Un motore bipolare ha una coppia più alta di un motore unipolare, ma è anche più complicato controllarlo.
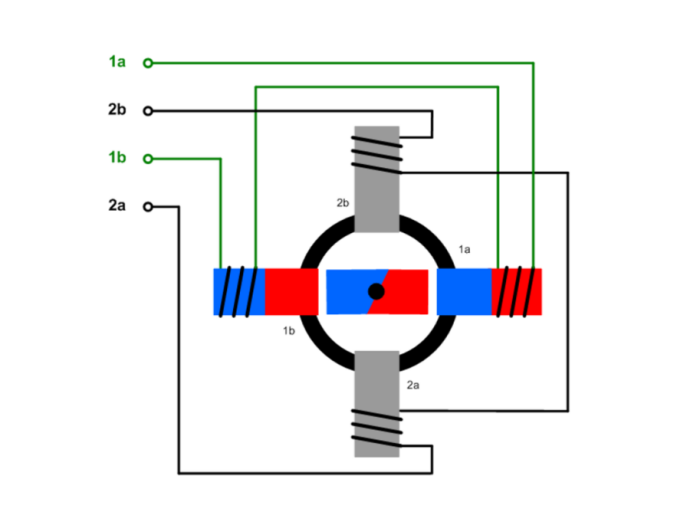
Bipolar stepper motor and the connection of its windings
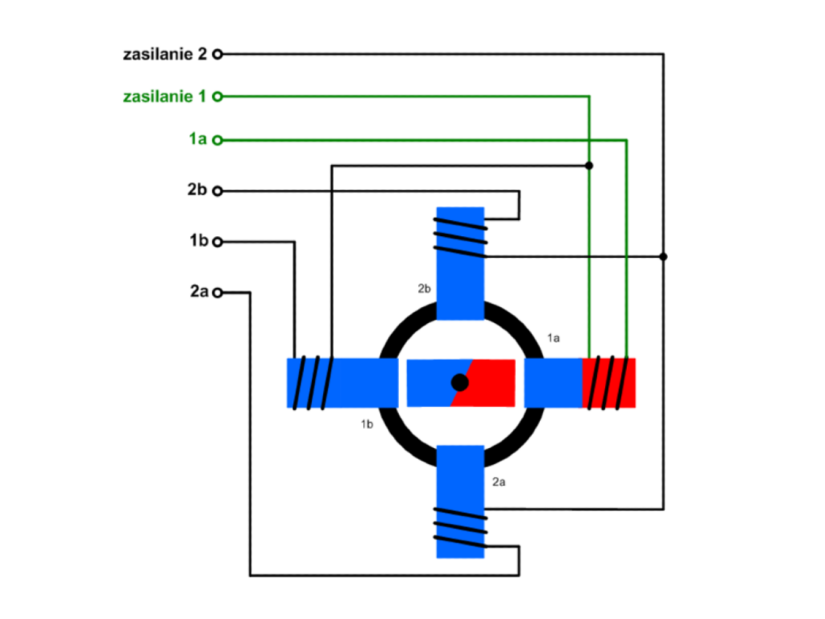
motore steppper unipolare e collegamento dei suoi avvolgimenti
| Bipolar stepper motor | Unipolar stepper motor |
| Higher torque | Lower torque |
| Higher anchorage due to windings | Lower anchorage |
| Smaller | Larger |
| Cheaper | More expensive |
| More complicated control, which requires a board that includes power and slew control stages | Easier control by requiring only one power circuit to be completed |
4. Advantages of stepper motors
- Positioning - Due to stepper motors moving in precise repeatable steps, they perform well in applications that require precise positioning.
- Speed control - Precise motion increments provide excellent control of speed.
- Low-speed torque - Stepper motors have high torque at low speeds.
5. Disadvantages of stepper motors
- Low efficiency - Compared to DC motors, they use more current. Therefore they tend to run hot.
- Limited high speed torque - The torque of the motor drops quickly as speed decreases
- No feedback - Feedback is not used to specify possible missed steps
- High levels of vibration and noise - At very high speeds, operation of this motor is not easy.
- Possible loss of synchronization - Caused by factors such as unexpected changes in load
- Small torque toward inertia ratio
- Require a drive circuit
6. What are stepper motors used for?
As such stepper motors are a good choice for applications that require low speed and high accuracy. Some of these everyday applications are listed below:
Stepper motors for 3D printers
Stepper motors are almost always included in common 3D printers. The use of stepper motors in 3D printers allows highly accurate motion and positioning without the need for encoders and other additional software or sensors in a cost-effective manner. Stepper motors can move to a known interval and then hold that position. They are a well-suited motor for moving objects to repeatable positions.
Depending on the type of printer, they are used in a variety of different applications. For example, stepper motors are used to move the extruder or build platform's X, Y and Z axes individually. The extruder assembly also has a stepper motor that is used to pull the filament into the extruder and control the delivery of consistent, even material to the machine throughout the printing process.
Stepper motors are available in a variety of sizes. the most common sizes used in 3D printers are NEMA 14, NEMA 17, NEMA 23 and NEMA 24.
 Motori Stepper per CNC
Motori Stepper per CNC
I motori Stepper sono un’alternativa ai servomotori e possono fornire energia alla maggior parte dei tipi di macchine CNC. I motori Stepper hanno un’impronta limitata e una progettazione semplice, che li rende ideali per piccole applicazioni come le fresatrici CNC. I motori Stepper costano meno dei motori servo per la stessa potenza, ma le versioni moderne dei motori Stepper spesso hanno le stesse caratteristiche. I motori Stepper sono più facili da capire e da usare a causa dell’assenza di codificatori, e anche i motori Stepper sono senza spazzole e facili da mantenere.
I motori Stepper di solito forniscono velocità di alimentazione da 50 a 1000 pollici al minuto, mentre i servomotori possono raggiungere oltre 2500 pollici al minuto. Se avete bisogno di molta accuratezza e di alte velocità di produzione, servo motors è una scelta migliore.
For applications that don't require ultra-high precision. Most CNC milling machines that cost less than $25,000 use stepper motors rather than servo motors. Closed-loop stepper motors are also worth considering, they are good at preventing errors due to missed steps and can be a good choice when you need a budget friendly solution for expensive workpieces.
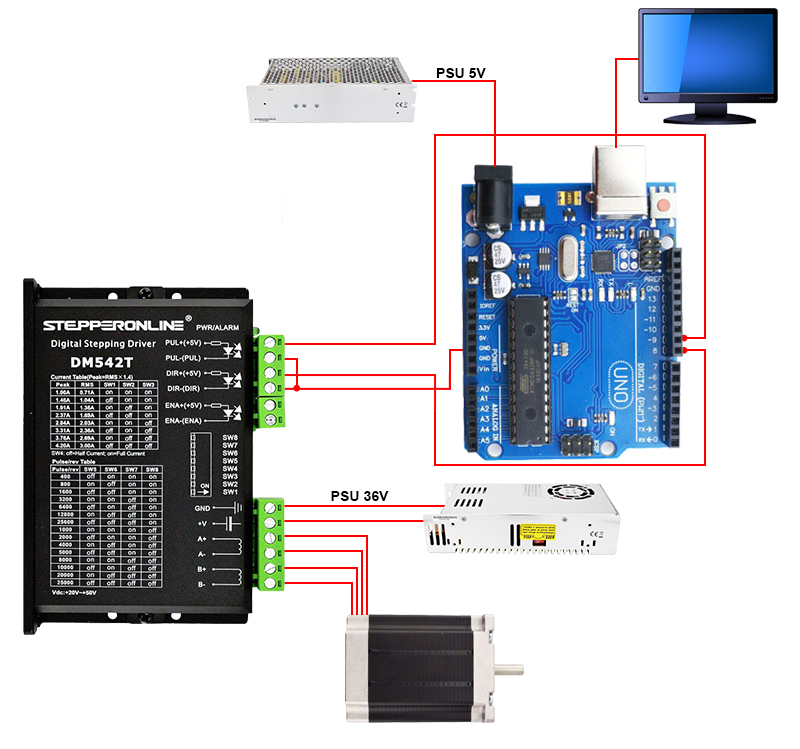
Motori Stepper per lampone Pi, Arduino, MicroPython (p. Es. Pyboard, Wipy, ESP32, ESP8266 e MicroBit)
I motori Stepper sono uno strumento periferico estremamente comune usato per aggiungere a singole schede computer come il Pi lampone, arduino, ecc., per permettere agli amatori di insegnare a se stessi le abilità di programmazione computerizzata di base. Spesso viene visto come un logico passo successivo dopo aver imparato a manipolare e controllare piccoli motori stepper poco costosi per imparare a controllare i cicli LED acceso/spento e altri semplici interruttori o tipi di ronzio.molti erano entusiasti di stepper potersu STEPPERONLINE per tali visite, a lasciare da maturare 5V maturare che si risvegliava ai livelli della madre del lampone.
Stepper per robot
I motori Stepper possono essere utilizzati per il controllo del movimento, agendo come attuatori che attivano le articolazioni del robot e possono accelerare il carico utile alla velocità desiderata.motori Stepper per macchine fotografiche
I motori Stepper hanno molte applicazioni nella videografia della macchina fotografica e sono comunemente usati per l’autofocalizzazione e lo zoom delle macchine fotografiche. Poiché il motore stepper consente una guida agevole e di alta precisione, consente di ridurre al minimo gli errori nel processo di rilevazione e di mettere a fuoco in modo accurato e regolare quando combinato con l’ultima tecnologia di visualizzazione in diretta.motori Stepper per il miglioramento della casa
I motori Stepper hanno anche molte applicazioni nell’automazione della casa. I motori stepper sono comunemente utilizzati per il funzionamento di persiane per il condizionamento dell’aria, valvole per tubi aperte o chiuse e parate motorizzate per finestre.