Leitung 10,16mm(0,4\") mit Sensor")
 Leitung 5,08mm(0,2\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 8mm(0,314961\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 2.54mm(0.1\") mit Sensor")
 Leitung 4mm(0,15748\") mit Sensor")
 Leitung 2mm(0,07874\") mit Sensor")
 Leitung 12,7mm(0,5\") mit Sensor")
 Leitung 6,35mm(0,25\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
 Leitung 10,16mm(0,4\") mit Sensor")
 Leitung 5,08mm(0,2\") mit Sensor")
 Leitung 2,54mm(0,1\") mit Sensor")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
 Nema 23 Schrittmotor und Treiber")
, Nema 34-Schrittmotor und Treiber sowie 60-V-Netzteil")
 Nema 34 Schrittmotor und Treiber")
 Nema 23 Schrittmotor und Treiber")
 Nema 34 Schrittmotor und Treiber")
 Nema 34 Schrittmotor und Treiber")
 Nema 34 Schrittmotore & Schrittmotortreiber & 60V Netzteil")















Die Steuerung von Schrittmotoren ist ein komplexes Thema, und dieser Artikel ist ein vereinfachter Leitfaden für Anfänger zur Einstellung von Schrittmotoren. Es werden die grundlegenden Prinzipien des Schrittmotorbetriebs behandelt. Es soll Anfängern helfen, einen Schrittmotor zum Laufen zu bringen.
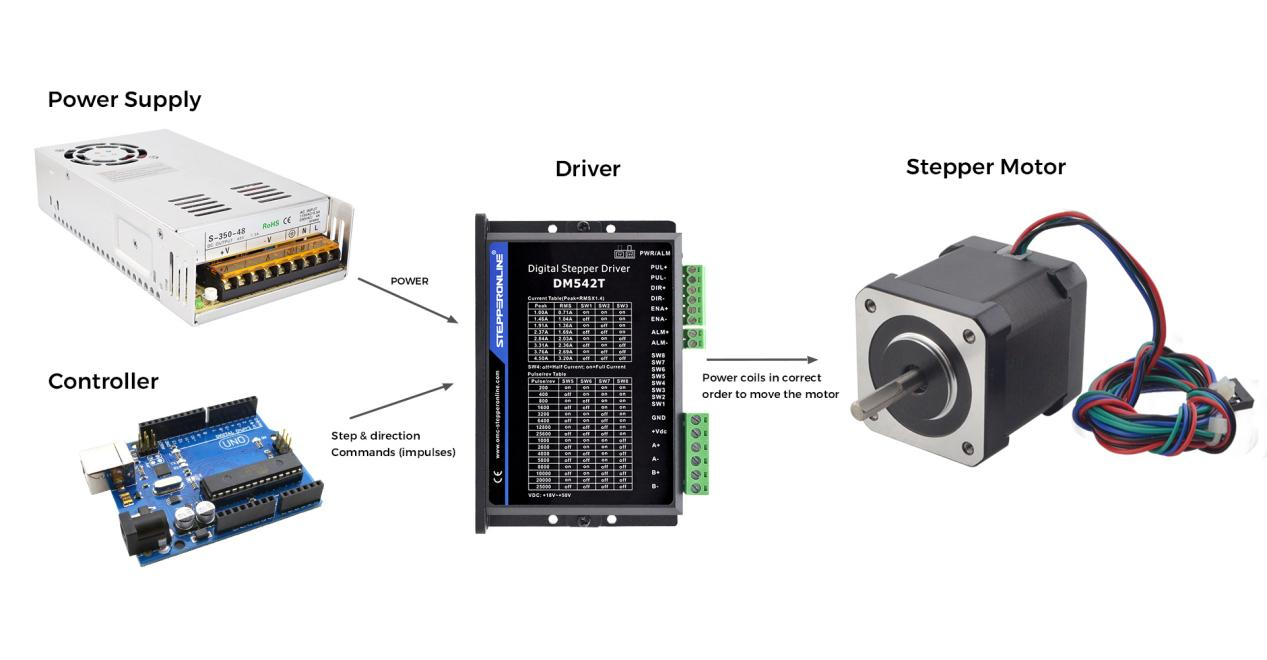
Um einen Schrittmotor anzutreiben, benötigen Sie in der Regel die folgenden Geräte:
- Schrittmotor
- Schrittmotortreiber
- Steuergerät
- Schaltnetzteil
Wie man die richtige Geräte auswählen kann
1. Schrittmotor
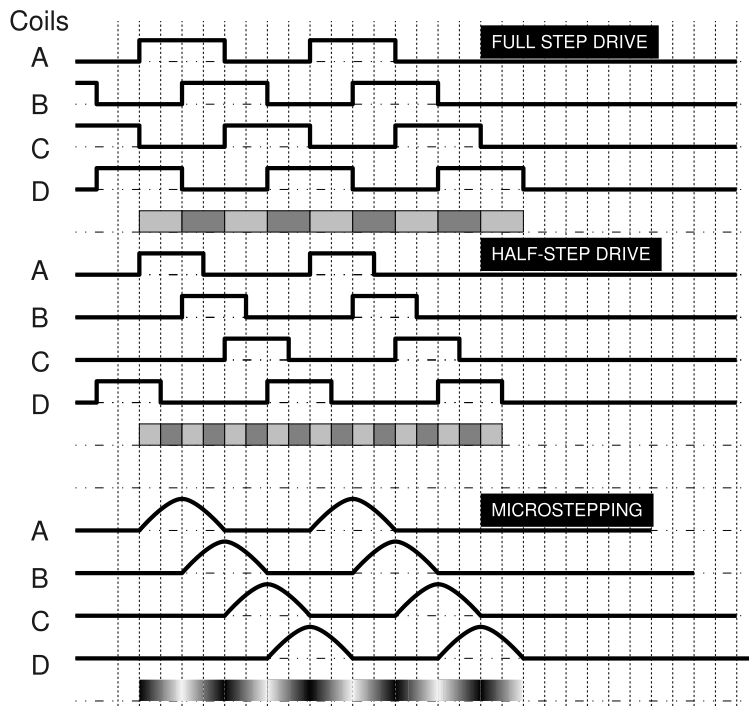
Ein Schrittmotor ist ein elektromagnetisches Gerät, das sich in diskreten Schritten bewegt. Es hat mehrere Spulen, die in Phasen organisiert sind. Wenn die einzelnen Phasen nacheinander erregt werden, schaltet der Motor in den Schrittbetrieb. Mit Schrittmotoren können Sie eine präzise Positionierung und Geschwindigkeitssteuerung erreichen. Es gibt im Wesentlichen drei Möglichkeiten, einen Schrittmotor anzutreiben. Dabei handelt es sich um Voll-, Halb- und Mikroschritt-Antriebe.
Sie müssen den richtigen Schrittmotor für Ihre Geschwindigkeits- und Drehmomentanforderungen anhand von Daten wie Baugröße, Schrittwinkel, Haltemoment, Nennstrom, Anzahl der Leitungen und unipolar oder bipolar auswählen. Im Folgenden werde ich einige dieser wichtigen Konzepte erläutern.
Nema: Nema ist keine Norm für die elektrischen Eigenschaften von Schrittmotoren. Es handelt sich lediglich um einen Standard für Frontplatten und Befestigungslöcher, um die Austauschbarkeit der Motoren zu erleichtern. Zum Beispiel bezieht sich die "17" in "NEMA 17" auf die Größe der Frontplatte, die in der NEMA-Standard die "Zahl" der NEMA geteilt durch 10 Zoll ist. So hat ein NEMA 17-Motor eine Frontplatte mit einer Breite von etwa 1,7 Zoll.
Schrittwinkel: Der Schrittwinkel gibt den Drehwinkel des Schrittmotors an, wenn das Steuersystem das Schrittimpulssignal sendet. Der allgemeine Schrittwinkel für Zweiphasen-Schrittmotoren beträgt 0,9°/1,8°, für Dreiphasen-Schrittmotoren 1,2° und für Fünfphasen-Schrittmotoren 0,72°.
Drehzahl-Drehmoment: Das Betriebsverhalten von Schrittmotoren bei niedrigen Drehzahlen ist von größerer praktischer Bedeutung. Schrittmotoren arbeiten typischerweise mit Drehzahlen von 300 bis 600 U/min. Da der Benutzer eine mechanische Untersetzungseinrichtung verwendet, um die Last zu tragen, wird die normale Motordrehzahl oft auf einige zehn Umdrehungen pro Minute festgelegt, um ein ausreichendes Motordrehmoment zu gewährleisten. In diesem Fall kann der Motor eine hohe Kraft, einen hohen Wirkungsgrad und eine geringe Geräuschentwicklung bieten.
Das Vibrationsproblem sollte durch Erhöhung der Unterteilung des Antriebs gelöst werden. Die Unterteilung ist die Steuerung des Motors durch den Antrieb, nachdem jeder Impuls vom oberen Computer durch einen vom Antrieb eingestellten Multiplikator unterteilt worden ist. Einfach ausgedrückt bedeutet dies, dass der Schrittwinkel des Motors um einen Multiplikator der Unterteilung reduziert wird.
Formel zur Berechnung der Motordrehzahl: Motordrehzahl (in U/min) = Pulsfrequenz (in Hz) * 60 / Unterteilung.
Haltemoment: Das Haltemoment gibt an, wie viel Drehmoment erforderlich ist, um einen Motor bei erregter Spule und ruhendem Rotor einen vollen Schritt zu bewegen. Die Wicklungen eines Schrittmotors werden auch dann erregt, wenn der Rotor selbst stillsteht. Dadurch wird die Position der Last in der Ruhephase beibehalten.
Wellenform: Sie müssen die physikalische Form dieser Motorwelle kennen, um Ihren Schrittmotor mit Getrieben, Riemenscheiben und anderen externen Verbindungen (wie Wellenkupplungen) zu verbinden. Es gibt mehrere gängige Formen. Darüber hinaus muss die Länge der Welle berücksichtigt werden.
Nachfolgend sind einige gängige Arten von Wellen aufgeführt:
- Runde Welle - rund geformte Welle
- "D"-Welle - eine D-förmige" Welle, die für die Montage von Zahnrädern mit Stellschrauben geeignet ist.
- Getriebewelle - eine Welle, in die ein Zahnrad geätzt ist.
- Spindelwelle - eine Welle, die wie eine Schraube geformt ist und für den Bau von Linearantrieben verwendet wird.
Nennstrom: Bezieht sich auf den Spitzenstrom. Dies ist eine nützliche Spezifikation, da sie Ihnen die Auswahl eines geeigneten Antriebs und einer geeigneten Stromversorgung für Ihren Schrittmotor ermöglicht.
2. Schrittmotortreiber
In der Regel wird der Schrittmotortreiber in Verbindung mit Schrittmotoren verwendet. Wenn Sie also einen Schrittmotor kaufen, ist es am besten, gleichzeitig einen passenden Treiber zu wählen, um spätere Probleme zu vermeiden.
Fast alle Schrittmotortreiber verwenden ein Standardprotokoll zur Steuerung des Motors. Es verwendet 3 Pins:
ENABLE - The driver will only operate when the ENABLE pin is pulled LOW or HIGH, depending on the driver.
DIRECTION - Bei LOW dreht sich der Motor in eine Richtung und bei HIGH in die andere Richtung. Dies bezieht sich auf die Art und Weise, wie Sie den Motor anschließen.
STEP - Immer wenn der STEP-Pin von LOW auf HIGH geht, macht der Stepper einen Schritt (oder Mikroschritt, abhängig von den Einstellungen des Antriebs).
3. Steuerung
Die Schrittmotorsteuerung ist in der Lage, Hochgeschwindigkeits-Impulssignale zu senden und ist programmierbar. SPS, Mikrocontroller und andere Geräte sind gängige Steuerungen auf dem Markt.
4. Schaltnetzteil
Für Schrittmotoren ist es am besten, ein Schaltnetzteil zu verwenden. Es ist sehr interferenzresistent und erlaubt eine große Schwankungsbreite. Der Strom muss entsprechend der Größe der Last gewählt werden. Es ist notwendig, einen Spielraum zu lassen. Wenn beispielsweise der Schrittmotorstrom 3 A und der Steuerlaststrom 2 A beträgt, sollte das Schaltnetzteil zwischen 6 A und 8 A gewählt werden.
Typen von Schrittmotoren, Treiber und Verkabelung
Bipolare und unipolare Motoren
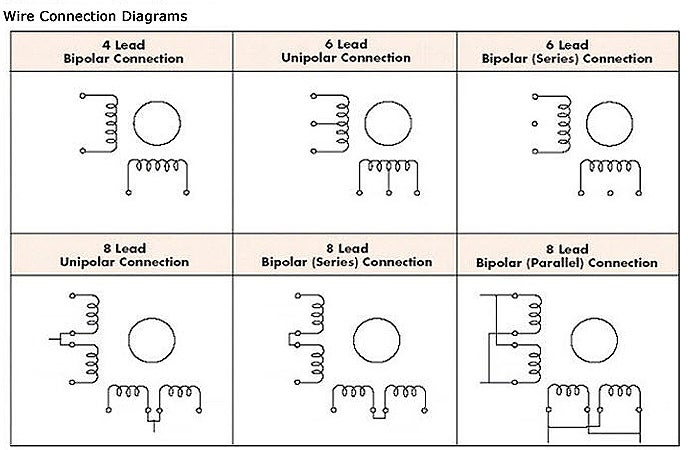
Es gibt zwei verschiedene Typen von Schrittmotoren: unipolare und bipolare. Der Hauptunterschied zwischen ihnen besteht darin, dass beide Typen ihre eigenen Wicklungsaufbauten haben, und ihre jeweiligen Wicklungsaufbauten beeinflussen die Art und Weise, wie ihre Schrittmotoren angetrieben werden.
Ein 4-Draht-Motor kann nur mit einem bipolaren Treiber betrieben werden. Ein 5-Draht-Motor kann nur von einem unipolaren Treiber angetrieben werden, da der Mittelabgriff intern miteinander verbunden ist. 6-Draht- und 8-Draht-Motoren können beide Treiberarten verwenden, da Sie entscheiden können, wie sie extern angeschlossen werden.
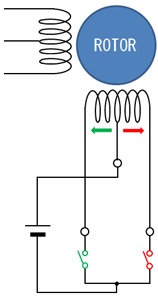
Einpolige und zweipolige Motoren funktionieren im Wesentlichen auf die gleiche Weise. Die Elektromagnete öffnen sich nacheinander, um die zentrale Motorwelle in Drehung zu versetzen. Der Unterschied zwischen ihnen liegt in der Art und Weise, wie die Spulen im Inneren des Motors erregt werden.
Ein unipolarer Motor kehrt die Polarität über den Mittelabgriff der Spule um, aber er versorgt nur die Hälfte der Spule gleichzeitig mit Strom, so dass er ein geringeres Drehmoment zur Verfügung hat.
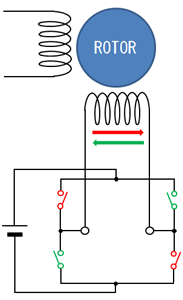
Bipolare Antriebe verwenden eine H-Brückenschaltung, um den durch die einzelnen Phasen fließenden Strom tatsächlich umzukehren. Durch die abwechselnde Erregung jeder Phase können alle Spulen zum Drehen des Motors verwendet werden.
Ein zweiphasiger bipolarer Motor hat zwei Sätze von Spulen. Zweiphasige bipolare Motoren haben vier Drähte, zwei für jede Phase. Bei einigen Motoren mit flexibler Verdrahtung ist es möglich, den Motor bipolar oder unipolar zu betreiben.
Unipolarer Antrieb
Bipolarer Antrieb
Konstantspannungstreiber vs. Konstantstromtreiber
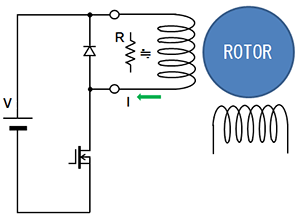
Es gibt zwei Arten von Motorantrieben: unipolar und bipolar, und zwei Methoden zur Steuerung des durch den Motor fließenden Stroms: konstante Spannung und konstanter Strom. Der Konstantspannungstreiber versorgt den Motor mit einer festen Spannung, während der Konstantstromtreiber dafür sorgt, dass der Motor einen konstanten Strom erhält, indem er die Spannung manipuliert. Konstantspannungstreiber werden auch als L/R-Treiber bezeichnet. Konstantstromtreiber werden auch als Chopper-Treiber bezeichnet.
Aufgrund der Drehmoment- und Geschwindigkeitsbegrenzungen von L/R-Treibern sind Konstantstromtreiber derzeit sehr beliebt. Konstantspannungstreiber werden am häufigsten für unipolare Schrittmotoren verwendet.
Bei der Verwendung von Konstantspannungstreibern ist die Nennspannung des Motors für praktische Anwendungen meist irrelevant. Lassen Sie sich daher nicht von Schrittmotoren beeinflussen, die auf sehr niedrigen Nennspannungen basieren. Ein wichtiger Wert, der zu beachten ist, ist der Nennstrom. Die Schrittmotortreiber von STEPPERONLINE sind derzeit Konstantstromtreiber!
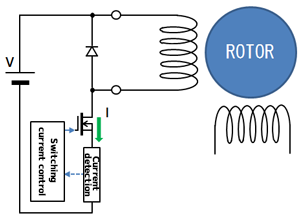
Ein Konstantstromtreiber kann einen Schrittmotor mit einer viel höheren Spannung als der Nennspannung des Motors betreiben. Durch die höhere Spannung kann der Strom schneller durch den Schrittmotor fließen, so dass er sich schneller dreht und ein höheres Drehmoment erreicht. Der Treiber hält den Strom im Motor unter einem festen Wert, was verhindert, dass der Motor durchbrennt. Der feste Strom wird in der Regel mit einem Trimmpotentiometer auf der Treiberplatine eingestellt. So können Sie den maximalen Strom je nach benötigtem Drehmoment und dem Nennstrom der Motorspezifikation ändern. Darüber hinaus bedeutet eine höhere Spannung weniger Wärme.
Konstantspannungstreiber
Konstantstromtreiber
Wie man einen Schrittmotor an einen Antrieb anschließt
Sie müssen herausfinden, welche Drähte die Spulenpaare bilden.Hier sind drei Methoden, um dies herauszufinden.
1. Sie können ein Multimeter verwenden und den Widerstand zwischen den vom Schrittmotor kommenden Drähten messen. Wenn ein Wert vorliegt, ist es ein Paar. Wenn nicht, handelt es sich nicht um ein Paar.
2. Wenn Sie kein Multimeter haben, können Sie den Motor auch drehen, während Sie die Drähte berühren. Je nachdem, welche Kombination es schwierig macht, den Motor zu bewegen, handelt es sich um ein Paar.
3. Natürlich ist es nicht praktikabel, alle möglichen Anschlusskombinationen mit einem Ohmmeter oder nach Gefühl herauszufinden. Am einfachsten ist es immer noch, die Anschlüsse gemäß dem Datenblatt des Motors vorzunehmen. Wenn Sie nicht schon einen haben, lesen Sie die Artikelnummer des Motors ab und suchen Sie im Internet. Möglicherweise müssen Sie sich mit dem Lieferanten Kontakt aufnehmen, um das Datenblatt für diesen Motor zu erhalten. STEPPERONLINE stellt das entsprechende Datenblatt zur Verfügung, und Sie können sich an den Kundendienst wenden, wenn noch etwas unklar ist.
Das nachstehende Diagramm zeigt mehrere verschiedene Wicklungsanordnungen: